You might also like
- Pres 5Document239 pagesPres 5Anonymous qTKCWlxNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Design of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Document10 pagesDesign of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Anonymous qTKCWlxNo ratings yet
- EcocomDocument13 pagesEcocomAnonymous qTKCWlxNo ratings yet
- ACClockMovement CMountDocument1 pageACClockMovement CMountAnonymous qTKCWlxNo ratings yet
- Manual Apple 1 ROMcarddDocument10 pagesManual Apple 1 ROMcarddAnonymous qTKCWlxNo ratings yet
- Down-Line Loading On Hero RobotDocument40 pagesDown-Line Loading On Hero RobotAnonymous qTKCWlxNo ratings yet
- ACClockMovement CMountDocument1 pageACClockMovement CMountAnonymous qTKCWlxNo ratings yet
- Basic Microprocessors and The 6800 (Ron Bishop) (1979)Document276 pagesBasic Microprocessors and The 6800 (Ron Bishop) (1979)Martin AlanizNo ratings yet
- ME4447-ME6405 Course OutlineDocument13 pagesME4447-ME6405 Course OutlineAnonymous qTKCWlxNo ratings yet
- Hs MukundaDocument22 pagesHs MukundaAnonymous qTKCWlxNo ratings yet
- Mechanical Design of Rocket Motors by Michael M. Madsen and Jørgen FranckDocument31 pagesMechanical Design of Rocket Motors by Michael M. Madsen and Jørgen FranckAnonymous qTKCWlxNo ratings yet
- Ultrasonic Welding Systems and Replacement ToolingDocument2 pagesUltrasonic Welding Systems and Replacement ToolingAnonymous qTKCWlxNo ratings yet
- .SC900 Manual ServoDocument56 pages.SC900 Manual ServoAnonymous qTKCWlxNo ratings yet
- VSTOL Short Course FlyerDocument1 pageVSTOL Short Course FlyerAnonymous qTKCWlxNo ratings yet
- Borroni BirdDocument16 pagesBorroni BirdAnonymous qTKCWlxNo ratings yet
- Combustion Process With Def.Document11 pagesCombustion Process With Def.Suresh VaddeNo ratings yet
- Robust Gain-Scheduled Control of A Vertical Takeoff Aircraft With Actuator Saturation Via The Lmi MethodDocument11 pagesRobust Gain-Scheduled Control of A Vertical Takeoff Aircraft With Actuator Saturation Via The Lmi MethodAnonymous qTKCWlxNo ratings yet
- ReadmeDocument1 pageReadmeroseanemvsNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ParkerOriga PDFDocument338 pagesParkerOriga PDFilyesNo ratings yet
- MS 1472-2017Document65 pagesMS 1472-2017Thinagaran100% (2)
- Digital Vision Installation PDFDocument2 pagesDigital Vision Installation PDFnikola5nikolicNo ratings yet
- 1993 - Distillation Column TargetsDocument12 pages1993 - Distillation Column TargetsOctaviano Maria OscarNo ratings yet
- DTMF Proximity DetectorDocument1 pageDTMF Proximity DetectorAlagappan ArunachalamNo ratings yet
- CAS PDII - Owners ManualDocument6 pagesCAS PDII - Owners ManualRoberto SalaNo ratings yet
- Motori Industriali Serie ASC Da 160 A 315mmDocument52 pagesMotori Industriali Serie ASC Da 160 A 315mmdungga1No ratings yet
- Bs1030 BrochureDocument2 pagesBs1030 BrochuremgvuleNo ratings yet
- Rtad Heat Recovery CatalogDocument48 pagesRtad Heat Recovery Catalogaidoudi walidNo ratings yet
- Camden CM-30EE-LED Data SheetDocument2 pagesCamden CM-30EE-LED Data SheetJMAC SupplyNo ratings yet
- Right ShipDocument25 pagesRight ShipEmmNo ratings yet
- Part 3B - Energy Balance - Open SystemDocument23 pagesPart 3B - Energy Balance - Open SystemHarold SumagaysayNo ratings yet
- Fix 3Document12 pagesFix 3Eng TrNo ratings yet
- Atmos GIGA N 32-160Document1 pageAtmos GIGA N 32-160Efril dilen franciscoNo ratings yet
- How to ping NodeB and RNC using RTN transmission IPDocument14 pagesHow to ping NodeB and RNC using RTN transmission IPPaulo DembiNo ratings yet
- Host 1Document6 pagesHost 1Lukman FafaNo ratings yet
- Wind MachinesDocument34 pagesWind Machinesjeswin johnsonNo ratings yet
- SUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Document54 pagesSUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Ravi Kumar100% (3)
- AC - ADENIYI MARUF OPEYEMI - FEBRUARY, 2023 - 2148745001 - FullStmtDocument6 pagesAC - ADENIYI MARUF OPEYEMI - FEBRUARY, 2023 - 2148745001 - FullStmtmophadmophadNo ratings yet
- ACAS II Operations in The European RVSM EnvironmentDocument45 pagesACAS II Operations in The European RVSM Environmentali4957270No ratings yet
- CIRCULAR WATER TANK DESIGN-Layout1 AkhilDocument1 pageCIRCULAR WATER TANK DESIGN-Layout1 AkhilVENKAT KALYANNo ratings yet
- S4L1D-D41 Wdg.311 - Technical Data Sheet - StamfordDocument10 pagesS4L1D-D41 Wdg.311 - Technical Data Sheet - Stamfordscribbles_buddyNo ratings yet
- Model 2000 Flow ComputerDocument8 pagesModel 2000 Flow ComputerAdnan SalihbegovicNo ratings yet
- Ajjarapu1998 PDFDocument11 pagesAjjarapu1998 PDFDanielXaveriusSagalaNo ratings yet
- BS 5950-4-1994 (Englezesc) PDFDocument38 pagesBS 5950-4-1994 (Englezesc) PDFYannis Alexandru100% (4)
- Chapter 4 Wastewater Collection and TransportationDocument8 pagesChapter 4 Wastewater Collection and Transportationmulabbi brian100% (1)
- Honda General Pursone Engine Gx120k1Document215 pagesHonda General Pursone Engine Gx120k1Ricky VilNo ratings yet
- Procedure For Management ReviewDocument3 pagesProcedure For Management ReviewMAYMODERN STEELNo ratings yet
- Barangay Profile: (BP DCF No. 1 S. 2022)Document4 pagesBarangay Profile: (BP DCF No. 1 S. 2022)AiMae BaobaoenNo ratings yet
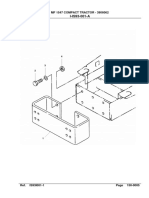
- MF1547Front Linkage - Seat PDFDocument18 pagesMF1547Front Linkage - Seat PDFAhmad Ali NursahidinNo ratings yet