You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Implementation of An Air-Entrainment Model in Interfoam: CFD With Opensource SoftwareDocument46 pagesImplementation of An Air-Entrainment Model in Interfoam: CFD With Opensource SoftwareSurya Chala PraveenNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 1 Question No. 1 Synthetic Data Generation and Simple Curve FittingDocument14 pages1 Question No. 1 Synthetic Data Generation and Simple Curve FittingSurya Chala PraveenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ITTC - Recommended Procedures: CFD, Resistance and Flow Uncertainty Analysis in CFD Examples For Resistance and FlowDocument12 pagesITTC - Recommended Procedures: CFD, Resistance and Flow Uncertainty Analysis in CFD Examples For Resistance and FlowSurya Chala PraveenNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Procedure For Estimation and Reporting of Uncertainty Due To Discretization in CFD ApplicationsDocument4 pagesProcedure For Estimation and Reporting of Uncertainty Due To Discretization in CFD ApplicationsSurya Chala PraveenNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- ExternalAero SEA Ugm 2015Document43 pagesExternalAero SEA Ugm 2015Surya Chala PraveenNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Towards A Cfd-Based Prediction of Ship PerformanceDocument12 pagesTowards A Cfd-Based Prediction of Ship PerformanceSurya Chala PraveenNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Robotic TunaDocument9 pagesRobotic TunaSurya Chala PraveenNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hamilton Series BrochureDocument12 pagesHamilton Series BrochureSurya Chala PraveenNo ratings yet
- Effects of Motion at Sea On Crew Performance - Stevens & Parsons - 2002 PDFDocument19 pagesEffects of Motion at Sea On Crew Performance - Stevens & Parsons - 2002 PDFSurya Chala PraveenNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Interference Resistance of Multi-Hulls Per Thin-Ship Theory: Ronald W. YeungDocument4 pagesInterference Resistance of Multi-Hulls Per Thin-Ship Theory: Ronald W. YeungSurya Chala PraveenNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Technical Report - Discharge Facilities For Oil Recovered at Sea PDFDocument356 pagesTechnical Report - Discharge Facilities For Oil Recovered at Sea PDFSurya Chala PraveenNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
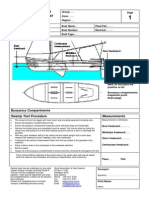
- 832 Swamp TestDocument1 page832 Swamp TestSurya Chala PraveenNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Uinl O: (12) Ulllted States Patent (10) Patent N0.: US 7,762,776 B2Document11 pagesUinl O: (12) Ulllted States Patent (10) Patent N0.: US 7,762,776 B2Surya Chala PraveenNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Cat 12Document4 pagesCat 12Surya Chala PraveenNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- GUIDELINES-No.37Guidelines For Towage at Sea, 2012 (Full Permission)Document45 pagesGUIDELINES-No.37Guidelines For Towage at Sea, 2012 (Full Permission)NMHaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Binaries - GL Leaflet For Inclining Test - V21 - tcm4-599587Document13 pagesBinaries - GL Leaflet For Inclining Test - V21 - tcm4-599587Surya Chala PraveenNo ratings yet
- Chapter 1 Intro Edited Sept 2020 1Document14 pagesChapter 1 Intro Edited Sept 2020 1Hannylet OcateNo ratings yet
- Scope: Formerly Um 817 Provisional Method - 1995 © 1995 TAPPIDocument5 pagesScope: Formerly Um 817 Provisional Method - 1995 © 1995 TAPPIguruprasadcvNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Brahma Type SM 592n 2 tw5s ts10s ManualDocument6 pagesBrahma Type SM 592n 2 tw5s ts10s ManualHadrianus PalaciosNo ratings yet
- v91 247 PDFDocument6 pagesv91 247 PDFbariah al-bashirahNo ratings yet
- BMP (Class 14 - Class-17) WeldingDocument24 pagesBMP (Class 14 - Class-17) WeldingAsesh PramanikNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- FIG. 4-8 Charts For OVER 4 In. (100 MM) : (A) Random Rounded Indications (See Note (1) )Document10 pagesFIG. 4-8 Charts For OVER 4 In. (100 MM) : (A) Random Rounded Indications (See Note (1) )mahmoud_allam3No ratings yet
- Moisture in The Atmosphere and Weather ChangesDocument40 pagesMoisture in The Atmosphere and Weather ChangesPatricia Sofia DizonNo ratings yet
- 2nd Semester All Courses-100Document194 pages2nd Semester All Courses-100Ejiade PeterNo ratings yet
- Manual Inglés Técnico I (416) - 2021Document117 pagesManual Inglés Técnico I (416) - 2021Matias D'OnofrioNo ratings yet
- S1 Grade 11 Activity Borja Roland Flor DDocument3 pagesS1 Grade 11 Activity Borja Roland Flor Dkellie borja100% (2)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Leaflet VertiDrive M3Document2 pagesLeaflet VertiDrive M3Kenan mira Mohammed NasherNo ratings yet
- Standard Datasheets Portfolio enDocument543 pagesStandard Datasheets Portfolio enTuna TaşkıntunaNo ratings yet
- Water Tank Seismic FORCES - SEFPDocument15 pagesWater Tank Seismic FORCES - SEFPHur HasanNo ratings yet
- 2017-Thermal Compression Bonding Understanding Heat Transfer by in Situ Measurements and ModelingDocument7 pages2017-Thermal Compression Bonding Understanding Heat Transfer by in Situ Measurements and ModelingDanNo ratings yet
- Basic Fluid Mechanics Interview Questions and AnswersDocument2 pagesBasic Fluid Mechanics Interview Questions and AnswersLuis Daniel RodríguezNo ratings yet
- Paperplainz Com Ib Math Aa SL Practice Exams Paper 1 Practice Exam 1Document5 pagesPaperplainz Com Ib Math Aa SL Practice Exams Paper 1 Practice Exam 1Aung Kyaw HtoonNo ratings yet
- CVP243 Steel ReinforcementDocument9 pagesCVP243 Steel ReinforcementManikyaMayankNo ratings yet
- Improvement of Productivity Using Tromp Curve MeasDocument11 pagesImprovement of Productivity Using Tromp Curve MeasRachit Bansal BJ20099No ratings yet
- Motion in Straight LineDocument13 pagesMotion in Straight LineKajol HNo ratings yet
- Black Holes in General Relativity and STDocument17 pagesBlack Holes in General Relativity and STDiogo MesquitaNo ratings yet
- Maxell Heater 1Document1 pageMaxell Heater 1wavehayiathNo ratings yet
- Esas REVIEWER 1Document11 pagesEsas REVIEWER 1Stephen JP De Leon0% (2)
- Types of Feed Water Heaters (With Operation) - Rankine Cycle - ThermodynamicsDocument7 pagesTypes of Feed Water Heaters (With Operation) - Rankine Cycle - ThermodynamicsSurjit DuttaNo ratings yet
- Astm E309-01Document5 pagesAstm E309-01Carlos Raul Caballero LeonNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lesson2 1-LightDocument4 pagesLesson2 1-LightGrace06 LabinNo ratings yet
- Electrical Isolation - Transformers - Electronics TextbookDocument4 pagesElectrical Isolation - Transformers - Electronics TextbookProcurement PardisanNo ratings yet
- Year 11 MathsDocument9 pagesYear 11 MathsEedris akinwandeNo ratings yet
- Fire On The Velvet Horizon PLAIN TEXT PDFDocument224 pagesFire On The Velvet Horizon PLAIN TEXT PDFGordon G0% (1)
- Pumps & Pumping Systems: Prof. Dr. Omar Badran Mechanical Engineering DepartmentDocument39 pagesPumps & Pumping Systems: Prof. Dr. Omar Badran Mechanical Engineering Departmentمحمد القدوميNo ratings yet
- STK4181 AF Power Amplifier (Split Power Supply) (45W + 45W Min, THD 0.08%)Document8 pagesSTK4181 AF Power Amplifier (Split Power Supply) (45W + 45W Min, THD 0.08%)João Carlos EspindolaNo ratings yet