You might also like
- Lecture 6: Introduction To Linear Dynamical Systems and ODE ReviewDocument12 pagesLecture 6: Introduction To Linear Dynamical Systems and ODE ReviewBabiiMuffinkNo ratings yet
- Lecture 6: Introduction To Linear Dynamical Systems and ODE ReviewDocument13 pagesLecture 6: Introduction To Linear Dynamical Systems and ODE ReviewBabiiMuffinkNo ratings yet
- ODE Equations ExplainedDocument16 pagesODE Equations ExplainedYanira EspinozaNo ratings yet
- Lecture 07 - 2Document7 pagesLecture 07 - 2khani gNo ratings yet
- The Wave Equation On RDocument12 pagesThe Wave Equation On RElohim Ortiz CaballeroNo ratings yet
- Lecture Notes on Numerical Analysis of Partial Differential EquationsDocument62 pagesLecture Notes on Numerical Analysis of Partial Differential Equationsmohammad affanNo ratings yet
- Digital Control Systems TutorialDocument16 pagesDigital Control Systems TutorialAndy ReynoldsNo ratings yet
- Class 13th NovDocument34 pagesClass 13th NovmileknzNo ratings yet
- Correlator Solution: 1 Collocation MethodDocument10 pagesCorrelator Solution: 1 Collocation MethodMuzamil ShahNo ratings yet
- Class1 ReadingDocument17 pagesClass1 ReadingJay acebedoNo ratings yet
- Principles of CommunicationDocument42 pagesPrinciples of CommunicationSachin DoddamaniNo ratings yet
- Solution of Excited Non-Linear Oscillators Under Damping Effects Using The Modified Differential Transform MethodDocument12 pagesSolution of Excited Non-Linear Oscillators Under Damping Effects Using The Modified Differential Transform MethodCaio CabralNo ratings yet
- MMS 05 Computational MethodsDocument52 pagesMMS 05 Computational MethodsSai pavan kumar reddy YeddulaNo ratings yet
- 14.1 Differential Equations: DefinitionsDocument52 pages14.1 Differential Equations: DefinitionsDaniel Lee Eisenberg JacobsNo ratings yet
- Mid Term Solutions PDFDocument2 pagesMid Term Solutions PDFMd Nur-A-Adam DonyNo ratings yet
- MA209 Solns Differential Equations Sec 1.1-1.3Document4 pagesMA209 Solns Differential Equations Sec 1.1-1.3SwaggyVBros MNo ratings yet
- Lec 1-2Document8 pagesLec 1-2Ravinder KuhadNo ratings yet
- Topic 4 Convolution IntegralDocument5 pagesTopic 4 Convolution IntegralRona SharmaNo ratings yet
- 6.003: Signals and Systems-Fall 2002Document10 pages6.003: Signals and Systems-Fall 2002samsritiNo ratings yet
- 2017optimalcontrol Solution AprilDocument4 pages2017optimalcontrol Solution Aprilenrico.michelatoNo ratings yet
- 2 DSystemsDocument14 pages2 DSystemsSaujatya MandalNo ratings yet
- Notation and TerminologyDocument23 pagesNotation and Terminology嘉蓉李No ratings yet
- Solution of The Wave Equation by Separation of Variables: U T 2 U XDocument7 pagesSolution of The Wave Equation by Separation of Variables: U T 2 U XSreejith JithuNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- Method of Separation of Variables: Module 5: Heat EquationDocument5 pagesMethod of Separation of Variables: Module 5: Heat EquationPavan MGNo ratings yet
- Method of Separation of Variables: Module 5: Heat EquationDocument5 pagesMethod of Separation of Variables: Module 5: Heat EquationRevanKumarBattuNo ratings yet
- Solve Heat Equation Using Separation of VariablesDocument5 pagesSolve Heat Equation Using Separation of VariablesPavan MGNo ratings yet
- Method of Separation of Variables: Module 5: Heat EquationDocument5 pagesMethod of Separation of Variables: Module 5: Heat EquationRevanKumarBattuNo ratings yet
- Second Order Odes: Koushik ViswanathanDocument17 pagesSecond Order Odes: Koushik ViswanathanAbhiyan PaudelNo ratings yet
- 2302 MTL102 ODE PartDocument63 pages2302 MTL102 ODE PartAYUSH SINGHNo ratings yet
- Lectures 1-6Document21 pagesLectures 1-6Ravinder KuhadNo ratings yet
- Module 13 - Differential Equations 2Document7 pagesModule 13 - Differential Equations 2api-3827096No ratings yet
- Linear Systems With Control TheoryDocument157 pagesLinear Systems With Control Theoryrangarazan100% (2)
- 1.3.1 First and Second Order PDEDocument11 pages1.3.1 First and Second Order PDECT MarNo ratings yet
- 5.2 Accuracy and Stability For U C UDocument12 pages5.2 Accuracy and Stability For U C UEfstathios SiampisNo ratings yet
- Time-domain Representations of Continuous-time SystemsDocument8 pagesTime-domain Representations of Continuous-time SystemsSamNo ratings yet
- ELEC221 HW04 Winter2023-1Document16 pagesELEC221 HW04 Winter2023-1Isha ShuklaNo ratings yet
- Chapter 9 - Numerical Methods For 1D Unsteady Heat & Wave EquationsDocument60 pagesChapter 9 - Numerical Methods For 1D Unsteady Heat & Wave EquationsAjayNo ratings yet
- Your Name: Cornell Theodore Samuel Peterson Student ID: Problem # 1Document6 pagesYour Name: Cornell Theodore Samuel Peterson Student ID: Problem # 1Minh McdohlNo ratings yet
- Solving Convolution Problems: PART I: Using The Convolution IntegralDocument4 pagesSolving Convolution Problems: PART I: Using The Convolution IntegralMayank NautiyalNo ratings yet
- EEE - 321: Signals and Systems Lab Assignment 2: Ilkent Niversity Lectrical and Lectronics Ngineering EpartmentDocument5 pagesEEE - 321: Signals and Systems Lab Assignment 2: Ilkent Niversity Lectrical and Lectronics Ngineering EpartmentSafa ÇelikNo ratings yet
- 1D/first order ODEs overviewDocument18 pages1D/first order ODEs overviewAbhiyan PaudelNo ratings yet
- MIT18 S096F13 Lecnote21Document7 pagesMIT18 S096F13 Lecnote21piwipebaNo ratings yet
- sns_2022_중간Document2 pagessns_2022_중간juyeons0204No ratings yet
- Solution of The Diffusion Equation: Introduction and Problem DefinitionDocument37 pagesSolution of The Diffusion Equation: Introduction and Problem DefinitionPratyushAgarwalNo ratings yet
- ODE Guide to First-Order Differential EquationsDocument16 pagesODE Guide to First-Order Differential EquationsAbdur Rehman KharalNo ratings yet
- MATH 219: Spring 2021-22Document9 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Solution of Ordinary Differential Equations: 1 General TheoryDocument3 pagesSolution of Ordinary Differential Equations: 1 General TheoryvlukovychNo ratings yet
- System of First Order Differential EquationsDocument24 pagesSystem of First Order Differential EquationsKaniel OutisNo ratings yet
- Math 20D - Fall 2011 - Final Exam TopicsDocument4 pagesMath 20D - Fall 2011 - Final Exam TopicsFasius TucklerNo ratings yet
- First Order PDEDocument13 pagesFirst Order PDEkcqywNo ratings yet
- Lecture7 PDFDocument16 pagesLecture7 PDFMato KankarašNo ratings yet
- Part II Problems and Solutions: Problem 1Document4 pagesPart II Problems and Solutions: Problem 1Bild LucaNo ratings yet
- Module 12 - Differential Equations 1Document7 pagesModule 12 - Differential Equations 1api-3827096No ratings yet
- Solving Differential Equations via Chebyshev Basis FunctionsDocument16 pagesSolving Differential Equations via Chebyshev Basis FunctionsAliyu AbdulqadirNo ratings yet
- Blatt6 SolutionDocument11 pagesBlatt6 SolutionJulesNo ratings yet
- Chapter 2. Linear Systems: Lecture Notes For MA2327Document50 pagesChapter 2. Linear Systems: Lecture Notes For MA2327Santiago Garrido BullónNo ratings yet
- FIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsDocument33 pagesFIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsdamnedchildNo ratings yet
- 6 Difference Equations: 6.1 Comparison To ODE and GeneralitiesDocument13 pages6 Difference Equations: 6.1 Comparison To ODE and GeneralitiesYanira EspinozaNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- 48 I D 5 Wall Manhole Components Sacramento County d1816Document1 page48 I D 5 Wall Manhole Components Sacramento County d1816Juan Gutier CcNo ratings yet
- Take A Moment To Consider This Moment ConnectionDocument5 pagesTake A Moment To Consider This Moment ConnectionCebeiller Sdn Bhd100% (1)
- AZIMAN - MADUN Vibro CompactacionDocument52 pagesAZIMAN - MADUN Vibro CompactacionJuan Gutier CcNo ratings yet
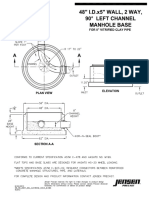
- 48 I D Manhole Base For Clay Pipe 2 Way 90 Deg Left d1690Document1 page48 I D Manhole Base For Clay Pipe 2 Way 90 Deg Left d1690Juan Gutier CcNo ratings yet
- Speaking The Same LanguageDocument3 pagesSpeaking The Same LanguageJuan Gutier CcNo ratings yet
- Pfuntner - 2014 Wsbs Final PDFDocument11 pagesPfuntner - 2014 Wsbs Final PDFJuan Gutier CcNo ratings yet
- 48 I D 5 Wall Flat Tops and Cones d557Document1 page48 I D 5 Wall Flat Tops and Cones d557Juan Gutier CcNo ratings yet
- AISC2005 V (r1.025) - LRFDDocument17 pagesAISC2005 V (r1.025) - LRFDJuan Gutier CcNo ratings yet
- 48 I D 5 Wall Manhole Components Clark County d1555Document1 page48 I D 5 Wall Manhole Components Clark County d1555Juan Gutier CcNo ratings yet
- Addressing Anchors (Steelwise Article On Anchor Bolt Fixes)Document3 pagesAddressing Anchors (Steelwise Article On Anchor Bolt Fixes)Justin UyarNo ratings yet
- 36 I D 4 Wall Manhole Components d1864Document1 page36 I D 4 Wall Manhole Components d1864Juan Gutier CcNo ratings yet
- Old BonesDocument3 pagesOld BonesJuan Gutier CcNo ratings yet
- 48 Dia To 24 Dia Manhole Component Stack Tucson d1651 PDFDocument1 page48 Dia To 24 Dia Manhole Component Stack Tucson d1651 PDFJuan Gutier CcNo ratings yet
- Concrete Joints ACPADocument12 pagesConcrete Joints ACPAgarystlmo100% (2)
- V 8 e Bridge Details SetDocument25 pagesV 8 e Bridge Details SetJuan Gutier CcNo ratings yet
- Specwise PDFDocument3 pagesSpecwise PDFJuan Gutier CcNo ratings yet
- Reinforcing The PointDocument3 pagesReinforcing The PointJuan Gutier CcNo ratings yet
- One StopshopDocument5 pagesOne StopshopJuan Gutier CcNo ratings yet
- Specwise: Structural Integrity-And ReorganizationDocument4 pagesSpecwise: Structural Integrity-And ReorganizationJuan Gutier CcNo ratings yet
- Steel WiseDocument3 pagesSteel WiseJuan Gutier CcNo ratings yet
- Rigged For The FutureDocument3 pagesRigged For The FuturecaiomarconNo ratings yet
- Shear Improvement To Shear DesignDocument4 pagesShear Improvement To Shear DesignJuan Gutier CcNo ratings yet
- As Hear Connection Extends Its ReachDocument4 pagesAs Hear Connection Extends Its ReachJuan Gutier CcNo ratings yet
- 48 I D 5 Wall Manhole Base Shells d553Document1 page48 I D 5 Wall Manhole Base Shells d553Juan Gutier CcNo ratings yet
- 48 I D 5 Wall Flat Tops and Cones Tucson d1650Document1 page48 I D 5 Wall Flat Tops and Cones Tucson d1650Juan Gutier CcNo ratings yet
- 48 Dia To 24 Dia Manhole Component Stack Tucson d1651Document1 page48 Dia To 24 Dia Manhole Component Stack Tucson d1651Juan Gutier CcNo ratings yet
- The Answer Is: and Pressure Vessel Code and The AWS Steel, Are Separate, Stand-Alone CodesDocument2 pagesThe Answer Is: and Pressure Vessel Code and The AWS Steel, Are Separate, Stand-Alone CodesJuan Gutier CcNo ratings yet
- IT Winter 10: The Answer Is Welding Qualification Tests and PMI Certification RequirementsDocument2 pagesIT Winter 10: The Answer Is Welding Qualification Tests and PMI Certification RequirementsJuan Gutier CcNo ratings yet
- It0410 20Document1 pageIt0410 20Juan Gutier CcNo ratings yet
- Ed081p36 1Document1 pageEd081p36 1IHN SisNo ratings yet
- CBSE Class 12 Chemistry Sample Paper-15: Material Downloaded From - 1 / 14Document14 pagesCBSE Class 12 Chemistry Sample Paper-15: Material Downloaded From - 1 / 14Allen Neal JonesNo ratings yet
- A Ghost in The MachineDocument7 pagesA Ghost in The MachineSicklslicerNo ratings yet
- D 4176Document4 pagesD 4176Salma FarooqNo ratings yet
- 7th Semester UET TaxilaDocument4 pages7th Semester UET TaxilaRameez AnwarNo ratings yet
- Risk Assessment of Existing Bridge StructuresDocument262 pagesRisk Assessment of Existing Bridge StructuresShadi0% (1)
- OTE 100 Years of Flotation Technology Eng WebDocument2 pagesOTE 100 Years of Flotation Technology Eng WebSoufi Badr100% (2)
- Column Object - Startup and Tuning GuideDocument9 pagesColumn Object - Startup and Tuning GuideIkhtiander IkhtianderNo ratings yet
- Circle TheoryDocument8 pagesCircle Theoryapi-278074538100% (3)
- IAST Lect23 SlidesDocument30 pagesIAST Lect23 SlideskyleNo ratings yet
- EC3-611 Rack Controller and ECD-000 Display UnitDocument8 pagesEC3-611 Rack Controller and ECD-000 Display UnitMaria DazaNo ratings yet
- Thermodynamics of Phase TransformationDocument20 pagesThermodynamics of Phase TransformationSaiCharan Dharavath100% (1)
- General Physics 2 Q1 LAS 5Document3 pagesGeneral Physics 2 Q1 LAS 5hoyNo ratings yet
- Module 1 & 2 (Tracking Radar) PDFDocument52 pagesModule 1 & 2 (Tracking Radar) PDFDeeksha NaiduNo ratings yet
- Feng Kang PrintDocument10 pagesFeng Kang Printjorgearce321No ratings yet
- JIS G 3106 - NewDocument38 pagesJIS G 3106 - NewMani Ma100% (2)
- 01 Vic Training Overview ProcessesDocument42 pages01 Vic Training Overview ProcessesWalter BardalesNo ratings yet
- JR Engg WAPDA (Civil)Document16 pagesJR Engg WAPDA (Civil)Hamza MujahidNo ratings yet
- AAnalyst 800 Detection Limits-Chromium DataDocument2 pagesAAnalyst 800 Detection Limits-Chromium DataЂорђе РадојичићNo ratings yet
- Chemistry Quarter 1 ModuleDocument43 pagesChemistry Quarter 1 ModuleKALI REICHERTNo ratings yet
- Brochure CTS-9005Document4 pagesBrochure CTS-9005Dika AnggaraNo ratings yet
- IR Drop PDFDocument3 pagesIR Drop PDFarammartNo ratings yet
- Year 10 Trigonometry 2Document4 pagesYear 10 Trigonometry 2Jack LagerNo ratings yet
- Mercury Project OverviewDocument18 pagesMercury Project OverviewKageyamaNo ratings yet
- Electrochemical Reactivation (EPR) For Detecting Sensitization of AISI Type 304 and 304L Stainless SteelsDocument9 pagesElectrochemical Reactivation (EPR) For Detecting Sensitization of AISI Type 304 and 304L Stainless SteelsAndres Carmona100% (1)
- Passive Flow Separation Control Over NACA 63018Document1 pagePassive Flow Separation Control Over NACA 63018miladrakhshaNo ratings yet
- M.Tech M 2016Document133 pagesM.Tech M 2016Priya ApteNo ratings yet
- Respect The Unstable PDFDocument14 pagesRespect The Unstable PDFMarcelo Quispe CcachucoNo ratings yet
- PhysicsX PDFDocument124 pagesPhysicsX PDFcitsNo ratings yet
- Simple and Inexpensive Microforge: by G. HilsonDocument5 pagesSimple and Inexpensive Microforge: by G. Hilsonfoober123No ratings yet