You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- ImageDocument1 pageImageMahmoudHelalNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Part1 PDFDocument200 pagesPart1 PDFMahmoudHelalNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- ImageDocument1 pageImageMahmoudHelalNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ImageDocument1 pageImageMahmoudHelalNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- My Presentation3Document1 pageMy Presentation3MahmoudHelalNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 1Document1 page1MahmoudHelalNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 10Document1 page10MahmoudHelalNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- ImageDocument1 pageImageMahmoudHelalNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 138 Topology OptimisationDocument9 pages138 Topology OptimisationKarthik KarunanidhiNo ratings yet
- 5Document1 page5MahmoudHelalNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 8Document1 page8MahmoudHelalNo ratings yet
- My Presentation2Document1 pageMy Presentation2MahmoudHelalNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 9Document1 page9MahmoudHelalNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 2Document1 page2MahmoudHelalNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- 6Document1 page6MahmoudHelalNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 4Document1 page4MahmoudHelalNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Design & Shape Optimization of Connecting Rod Using FEA: A ReviewDocument6 pagesDesign & Shape Optimization of Connecting Rod Using FEA: A ReviewerpublicationNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- 3Document1 page3MahmoudHelalNo ratings yet
- Jeong Umd 0117N 11001Document57 pagesJeong Umd 0117N 11001MahmoudHelalNo ratings yet
- Design and Analysis of Connecting Rod For Different Material Using Ansys Workbench 16.2Document27 pagesDesign and Analysis of Connecting Rod For Different Material Using Ansys Workbench 16.2MahmoudHelalNo ratings yet
- My PresentationDocument1 pageMy PresentationMahmoudHelalNo ratings yet
- My Presentation2Document1 pageMy Presentation2MahmoudHelalNo ratings yet
- Zhao 2014Document7 pagesZhao 2014MahmoudHelalNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sci24831112297400 PDFDocument8 pagesSci24831112297400 PDFMahmoudHelalNo ratings yet
- 3 - Design of ShaftDocument3 pages3 - Design of ShaftMahmoudHelalNo ratings yet
- 2 - Analysis of Very Large Floating Structure Using Ansys PDFDocument14 pages2 - Analysis of Very Large Floating Structure Using Ansys PDFMahmoudHelalNo ratings yet
- P Int 2188Document107 pagesP Int 2188MahmoudHelalNo ratings yet
- Basic FEA System Guide: Linear Static, Modal & Buckling AnalysisDocument440 pagesBasic FEA System Guide: Linear Static, Modal & Buckling AnalysisMohammed MaimoonNo ratings yet
- Kougias FinalReport PDFDocument29 pagesKougias FinalReport PDFMahmoudHelalNo ratings yet
- Buckling Analysis of Plate Element Subjectedto in Plane Loading Using Ansys PDFDocument10 pagesBuckling Analysis of Plate Element Subjectedto in Plane Loading Using Ansys PDFMahmoudHelalNo ratings yet
- ASD - Structural Code - 2016-02 PDFDocument37 pagesASD - Structural Code - 2016-02 PDFWilliam BohorquezNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- BITS Pilani: Module 4: Design of Separation Systems Lecture-15Document24 pagesBITS Pilani: Module 4: Design of Separation Systems Lecture-15sukhmaniNo ratings yet
- UPoles - Paper - Durability of Poles in NESC Grade C Construction by HJ Dagher - 04-23-2001.ashxDocument22 pagesUPoles - Paper - Durability of Poles in NESC Grade C Construction by HJ Dagher - 04-23-2001.ashxVictor JimenezNo ratings yet
- Properties of Fluids ExplainedDocument13 pagesProperties of Fluids ExplainedGie Andal0% (3)
- TECHNO-COMMERCIAL PROPOSAL FOR DOUBLE EFFECT STEAM DRIVEN VAPOUR ABSORPTION MACHINE WITH ADVANCED SERIES FLOW TECHNOLOGYDocument28 pagesTECHNO-COMMERCIAL PROPOSAL FOR DOUBLE EFFECT STEAM DRIVEN VAPOUR ABSORPTION MACHINE WITH ADVANCED SERIES FLOW TECHNOLOGYradheNo ratings yet
- Chemical Supplies Company ListingDocument757 pagesChemical Supplies Company ListingAmit Jage50% (4)
- Overview of Pressure Vessel Design-Instructor's Guide (Carucci)Document137 pagesOverview of Pressure Vessel Design-Instructor's Guide (Carucci)Kittipong PhakakarnNo ratings yet
- Motor Spec - IPOWER Rev01Document4 pagesMotor Spec - IPOWER Rev01GAGANNo ratings yet
- Public Review Draft 2394Document82 pagesPublic Review Draft 2394Johan SetiawanNo ratings yet
- Boiler LogicsDocument42 pagesBoiler LogicsSupratim Pal100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pce 3Document10 pagesPce 3Jovel LapidNo ratings yet
- Nitoflor EU5 PDFDocument4 pagesNitoflor EU5 PDFriverwilliamsNo ratings yet
- Thermodynamics control volume analysisDocument6 pagesThermodynamics control volume analysisLUISRONo ratings yet
- UK Gate Valves Brochure High Res 02 - 2017Document20 pagesUK Gate Valves Brochure High Res 02 - 2017Sivasubramanian PalaniappanNo ratings yet
- Rotary Vane PumpDocument7 pagesRotary Vane PumpSanny HamdaniNo ratings yet
- Progress Report I: Presented By: Yousaf Makkouk (3612016) Presented To: Dr. Sultan SalamahDocument12 pagesProgress Report I: Presented By: Yousaf Makkouk (3612016) Presented To: Dr. Sultan SalamahMuhammad NisarNo ratings yet
- Chieftain 1800 SpecsDocument16 pagesChieftain 1800 SpecsPercy Luis Nima AlvaradoNo ratings yet
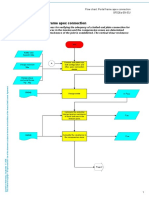
- SF026a-Flow Chart Portal Frame Apex ConnectionDocument3 pagesSF026a-Flow Chart Portal Frame Apex ConnectiondvelchevNo ratings yet
- Checklist of Material Submission (Concrete)Document10 pagesChecklist of Material Submission (Concrete)Yau Ka Ki Jacky0% (1)
- BECE BDT Past Questions 2016Document9 pagesBECE BDT Past Questions 2016Anonymous lnC6IDg67% (3)
- Physical Inventory - Fast Moving Warehouse 011020Document513 pagesPhysical Inventory - Fast Moving Warehouse 011020Demy LucenoNo ratings yet
- Tcsi Quality Plan: One Ayala Avenue Project Makati City, Metro ManilaDocument20 pagesTcsi Quality Plan: One Ayala Avenue Project Makati City, Metro ManilaEugene Santiago PadillaNo ratings yet
- Why Using MCCB Instead of FusesDocument4 pagesWhy Using MCCB Instead of Fuses123peniscolaNo ratings yet
- QCVN 162019BXD National Technical Regulation On Products, Goods of Building Materials (Eng)Document41 pagesQCVN 162019BXD National Technical Regulation On Products, Goods of Building Materials (Eng)lwin_oo2435No ratings yet
- Fire Detector PlacementDocument32 pagesFire Detector Placementawadalmekawy100% (2)
- Sludge ThickeningDocument33 pagesSludge ThickeningKharisma Natalia100% (1)
- DOE Guidance WBSDocument20 pagesDOE Guidance WBSShowki WaniNo ratings yet
- DistillationDocument15 pagesDistillationRahul PalsNo ratings yet
- Defogging rear window with thin heating elementDocument3 pagesDefogging rear window with thin heating elementMuhammad MoollaNo ratings yet
- Boiler ProblemsDocument59 pagesBoiler ProblemsDharmendra BurraNo ratings yet
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishFrom EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishRating: 4.5 out of 5 stars4.5/5 (18)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- When the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyFrom EverandWhen the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyRating: 3 out of 5 stars3/5 (7)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)