You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ubc 2011 Fall Vakili SoheylDocument193 pagesUbc 2011 Fall Vakili Soheyl조기현No ratings yet
- Tensile Testing Apparatus Design with 220000 N Load LimitDocument5 pagesTensile Testing Apparatus Design with 220000 N Load LimitMunir EffendyNo ratings yet
- Finite Difference Solution of Seepage Equation: A Mathematical Model For Fluid FlowDocument9 pagesFinite Difference Solution of Seepage Equation: A Mathematical Model For Fluid FlowthesijNo ratings yet
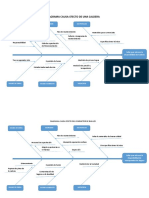
- Caldera causa-efecto diagrama mantenimiento fallasDocument2 pagesCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNo ratings yet
- Portal FrameDocument7 pagesPortal FrameAzzren Azzrain100% (2)
- Intro To ANSYS NCode DL 14 5 L02 CAE FatigueDocument36 pagesIntro To ANSYS NCode DL 14 5 L02 CAE FatiguePercy Romero MurilloNo ratings yet
- Airy FunctionDocument10 pagesAiry Functionalokesh1982No ratings yet
- Determine pKa of Potassium Hydrogen Phthalate via Potentiometric TitrationDocument5 pagesDetermine pKa of Potassium Hydrogen Phthalate via Potentiometric TitrationSheenly Anne SaavedraNo ratings yet
- Dye Penetrant InspectionDocument18 pagesDye Penetrant InspectionMidhun K ChandraboseNo ratings yet
- Diffusivity Equation: 13 February 2008Document17 pagesDiffusivity Equation: 13 February 2008Yaser RashedNo ratings yet
- Inroduction To AnysisDocument7 pagesInroduction To Anysissantosh gorliNo ratings yet
- Algebra PDFDocument2 pagesAlgebra PDFpalle sandhyaNo ratings yet
- Mass Transfer PartDocument54 pagesMass Transfer Partoctoviancletus100% (3)
- Flixborough - The Disaster and Its Aftermath PDFDocument31 pagesFlixborough - The Disaster and Its Aftermath PDFAlessio Scarabelli100% (2)
- Chapter 5 - Energy Analysis For Open Systems Compatibility ModeDocument35 pagesChapter 5 - Energy Analysis For Open Systems Compatibility ModekhameesmarwanNo ratings yet
- Thermal System Simulation ProblemsDocument230 pagesThermal System Simulation ProblemsAanand Rishabh DagaNo ratings yet
- ME8501 Metrology and Measurements PDFDocument93 pagesME8501 Metrology and Measurements PDFpuneetNo ratings yet
- Unit 2 MCB Key PDFDocument19 pagesUnit 2 MCB Key PDFDafne Fertig88% (32)
- Applus EN 13501-1 Test Report Part 1 PDFDocument24 pagesApplus EN 13501-1 Test Report Part 1 PDFaziz hNo ratings yet
- Magnetic Field and Magnetic Effects of Current: Assignment 2Document2 pagesMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNo ratings yet
- Engineering and Chemical Thermodynamics 2e: Chapter 1 SolutionsDocument41 pagesEngineering and Chemical Thermodynamics 2e: Chapter 1 SolutionsLalo RubioNo ratings yet
- Reviews Synta (120 MM F8.3 and 150 MM F5) .Document1 pageReviews Synta (120 MM F8.3 and 150 MM F5) .Giannis TheodorouNo ratings yet
- Corning CRN 24 ALTOS 24FDocument3 pagesCorning CRN 24 ALTOS 24FSosialNo ratings yet
- Price ListDocument3 pagesPrice ListkiaangelieNo ratings yet
- Electron Configuration NotesDocument4 pagesElectron Configuration NotesapriantokaNo ratings yet
- 12-Story Steel Building AnalysisDocument505 pages12-Story Steel Building Analysissysyphus01100% (1)
- Analysis of A Primary Suspension Spring Used in LocomotivesDocument4 pagesAnalysis of A Primary Suspension Spring Used in Locomotivesdhanalakshmi k sNo ratings yet
- Assignment 1 AtomicDocument7 pagesAssignment 1 AtomicAman9692No ratings yet
- Daftar PustakaDocument2 pagesDaftar PustakaAnsmunandarNo ratings yet
- The Four Ethers: Contributions to Rudolf Steiner's Science of the EthersDocument33 pagesThe Four Ethers: Contributions to Rudolf Steiner's Science of the EthersSolomanTrismosin100% (2)