You might also like
- Semana 7Document25 pagesSemana 7Christian Asencios HuertaNo ratings yet
- M M II TensoresDocument29 pagesM M II TensoresAlejandroNo ratings yet
- Formas Canonicas Reales PDFDocument8 pagesFormas Canonicas Reales PDFLuis MNo ratings yet
- Isomorfos Espacios VecotrialesDocument4 pagesIsomorfos Espacios VecotrialesJosé H MariñoNo ratings yet
- Ejercicios Propuestos Parcial 4Document8 pagesEjercicios Propuestos Parcial 4Marley PeñaNo ratings yet
- Trabajo de Transformacion Lineales TerminadoDocument22 pagesTrabajo de Transformacion Lineales TerminadoFrancisco Javier ObandoNo ratings yet
- DualDocument2 pagesDualGonzalo de SouzaNo ratings yet
- Linoper SelfadjointDocument5 pagesLinoper SelfadjointDiego GuerreroNo ratings yet
- Ve RPDocument8 pagesVe RPhp8716728No ratings yet
- Auxiliar 9 Transformaciones LinealesDocument2 pagesAuxiliar 9 Transformaciones LinealesKEVIN MARIÑONo ratings yet
- Modelos de Regresión Lineal Simple-ResumenDocument5 pagesModelos de Regresión Lineal Simple-ResumenJericoNo ratings yet
- Corrección Primer Parcial, Algebra Lineal Avanzada, Semestre II08Document3 pagesCorrección Primer Parcial, Algebra Lineal Avanzada, Semestre II08Hans Müller Santa Cruz75% (4)
- Tarea Examen 4 LinealDocument3 pagesTarea Examen 4 LinealJorge Alberto MoralesNo ratings yet
- Corrección, Primer Parcial Algebra Lineal Avanzada, Semestre I08Document3 pagesCorrección, Primer Parcial Algebra Lineal Avanzada, Semestre I08Hans Müller Santa Cruz100% (1)
- KroneckerDocument2 pagesKroneckerJEAN CARLOS VALDEZ FUERTESNo ratings yet
- Gal2 Fing Udelar (Hasta Primer Parcial)Document13 pagesGal2 Fing Udelar (Hasta Primer Parcial)luka.f.miguezNo ratings yet
- DiagonalizaciónDocument47 pagesDiagonalizaciónJonathan MartinezNo ratings yet
- DiagonalizaciónDocument47 pagesDiagonalizaciónJonathan MartinezNo ratings yet
- Transformación de Box y CoxDocument2 pagesTransformación de Box y CoxFrans Romero CernaNo ratings yet
- Lista 7 Alg LinealDocument3 pagesLista 7 Alg LinealJim Manriquez GarridoNo ratings yet
- AL Esp Vect 9Document7 pagesAL Esp Vect 9daya.vampire.nightNo ratings yet
- Tema 7 - Correlación y Regresión LinealDocument39 pagesTema 7 - Correlación y Regresión LinealManuelNo ratings yet
- Capítulo 03 Álgebra Lineal Fascgrado2 Gabriela Jeronimo-77-106Document30 pagesCapítulo 03 Álgebra Lineal Fascgrado2 Gabriela Jeronimo-77-106Juan D GonzálezNo ratings yet
- FMMP312 s9 GomezDocument23 pagesFMMP312 s9 Gomezlomejor delalifeNo ratings yet
- Dim Ker Image Es PDFDocument3 pagesDim Ker Image Es PDFEmanuel CerdaNo ratings yet
- GAL2 IsometriasDocument12 pagesGAL2 IsometriasJeancarlo RivasNo ratings yet
- Problemas Resueltos de TRR-R.Perez - Alvarez PDFDocument66 pagesProblemas Resueltos de TRR-R.Perez - Alvarez PDFJosepNo ratings yet
- Normal Operators Es PDFDocument4 pagesNormal Operators Es PDFmaryNo ratings yet
- Formas CuadraticasDocument41 pagesFormas CuadraticasTomas DiazNo ratings yet
- Practico 5Document2 pagesPractico 5Ditmar Sayritupac VenturaNo ratings yet
- MiFee - CL - Pauta Ayudantia 8Document3 pagesMiFee - CL - Pauta Ayudantia 8paquebotttNo ratings yet
- Regresión Lineal y Métodos No ParametricosDocument50 pagesRegresión Lineal y Métodos No ParametricosKarolay Trillos BallesterosNo ratings yet
- Tensor Energía-MomentoDocument4 pagesTensor Energía-MomentoVirgilio Jose Cambraia LopesNo ratings yet
- Parcial SolDocument5 pagesParcial SolLuis Alvarado AvalosNo ratings yet
- Tema 1Document24 pagesTema 1eliseo noeNo ratings yet
- Eigenvalores ComplejosDocument5 pagesEigenvalores ComplejosALEXIS WEBNo ratings yet
- AL2020 Cap2 3ra Parte SinpausasDocument36 pagesAL2020 Cap2 3ra Parte SinpausaserikNo ratings yet
- Semana 11Document28 pagesSemana 11Saúl OrtizNo ratings yet
- 5.1 Solucion Fisica Ciencia e Ingenieria Vol 1y 2 Giancoli 4Document20 pages5.1 Solucion Fisica Ciencia e Ingenieria Vol 1y 2 Giancoli 4Sofía Harriet De Santiago100% (1)
- Notas de Algebra 3Document14 pagesNotas de Algebra 3Luis AlanísNo ratings yet
- Ejercicios DiagonalizacionsolucionesDocument6 pagesEjercicios DiagonalizacionsolucionesOscar suarezNo ratings yet
- Transformaciones Lineales TrabajoDocument22 pagesTransformaciones Lineales TrabajoDARWINSOLNo ratings yet
- 10 Modelo de Regresión LinealDocument16 pages10 Modelo de Regresión LinealKd KokiNo ratings yet
- Mate PDFDocument22 pagesMate PDFValentina AsanzaNo ratings yet
- Resumen para Algebra II PDFDocument10 pagesResumen para Algebra II PDFDavid NavarreteNo ratings yet
- Notas de ClaseDocument28 pagesNotas de ClaseEdwin Mendoza AvilaNo ratings yet
- Relatividad ElectrodinamicaDocument8 pagesRelatividad ElectrodinamicaAgustin SanchezNo ratings yet
- Vectores y Matrices PDFDocument24 pagesVectores y Matrices PDFSantiago MartinezNo ratings yet
- Apunte Transformaciones LinealesDocument3 pagesApunte Transformaciones LinealesMatyOyarzoAlvaradoNo ratings yet
- Problemas de Dualidad y Bases Duales - El Blog de LeoDocument11 pagesProblemas de Dualidad y Bases Duales - El Blog de LeoJose Francisco Rubio DiazNo ratings yet
- VVP FcienDocument34 pagesVVP Fcienantonela nogueiraNo ratings yet
- Pauta I1 ICS3153Document5 pagesPauta I1 ICS3153Juyoung WangNo ratings yet
- Deber 7Document2 pagesDeber 7Mario Aguaguiña M.No ratings yet
- DiagonalizacionDocument12 pagesDiagonalizacionLeonel Sebastian Fontan DesimoneNo ratings yet
- Notas para El Curso de Algebra Lineal II (Frank P. Murphy)Document49 pagesNotas para El Curso de Algebra Lineal II (Frank P. Murphy)Germán Toxqui ColulaNo ratings yet
- TBJ - Pequena Senal - ApunteDocument11 pagesTBJ - Pequena Senal - ApunteluanaNo ratings yet
- Capitulo 9Document28 pagesCapitulo 9Jose Eduardo Barriga RuaNo ratings yet
- 1 Socioemocional Mda PDFDocument5 pages1 Socioemocional Mda PDFHomero Ruiz HernandezNo ratings yet
- Ayuda PDFDocument6 pagesAyuda PDFRonal Taylor AlavaNo ratings yet
- Octubre1er2018 PDFDocument64 pagesOctubre1er2018 PDFHomero Ruiz HernandezNo ratings yet
- Planeacion de OctubreDocument64 pagesPlaneacion de OctubreLohanYi100% (2)
- 1er Grado - Dosificación 1er Trimestre (2018-2019)Document4 pages1er Grado - Dosificación 1er Trimestre (2018-2019)Anonymous nTLl2cKqNo ratings yet
- Comenzar Guia: Guía Interactiva EXANI-I Admisión Inicio Guías EXANI-I AdmisiónDocument1 pageComenzar Guia: Guía Interactiva EXANI-I Admisión Inicio Guías EXANI-I AdmisiónHomero Ruiz HernandezNo ratings yet
- Ley Gil ZuarthDocument23 pagesLey Gil ZuarthAnonymous y1ncyzqNo ratings yet
- Botánica Fanerogámica: NaturalezaDocument2 pagesBotánica Fanerogámica: NaturalezaHomero Ruiz HernandezNo ratings yet
- Test para Identificar Los Estilos de Aprendizaje en Niños PDFDocument1 pageTest para Identificar Los Estilos de Aprendizaje en Niños PDFHomero Ruiz HernandezNo ratings yet
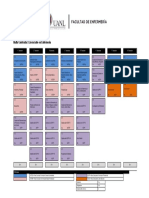
- Licenciado en Enfermería-Malla CurricularDocument1 pageLicenciado en Enfermería-Malla CurricularHomero Ruiz HernandezNo ratings yet
- El Calculo Con Geometria Analitica 6ta Edicion Louis Leithold A29086Document3 pagesEl Calculo Con Geometria Analitica 6ta Edicion Louis Leithold A29086Homero Ruiz Hernandez50% (2)
- Olimpiada MatematicaDocument2 pagesOlimpiada Matematicajose martinezNo ratings yet
- Espanol 3secundaria MaestroDocument48 pagesEspanol 3secundaria MaestroJose AlonsoNo ratings yet
- Drupal 7 Conocimientos Previos para Entender Este TutorialDocument5 pagesDrupal 7 Conocimientos Previos para Entender Este TutorialHomero Ruiz Hernandez100% (1)
- George Polya - Los Diez Mandamientos Del ProfesorDocument2 pagesGeorge Polya - Los Diez Mandamientos Del ProfesorEmmanuel Rosario CalixtoNo ratings yet
- 25Document1 page25Homero Ruiz HernandezNo ratings yet
- Ley No 919 Ley de Seguridad Soberana-dic102015FinalDocument12 pagesLey No 919 Ley de Seguridad Soberana-dic102015Finalخورخي لويسNo ratings yet
- 21152415Document8 pages21152415Homero Ruiz HernandezNo ratings yet
- Escribir Chino Simplificado en Windows XP Ms Pinyin Ime PDFDocument7 pagesEscribir Chino Simplificado en Windows XP Ms Pinyin Ime PDFHomero Ruiz HernandezNo ratings yet
- Lineamientos EXOALDocument45 pagesLineamientos EXOALQuantumMexicoNo ratings yet
- Olimpiada MatematicaDocument2 pagesOlimpiada Matematicajose martinezNo ratings yet
- 2017 1 Nivel4Document2 pages2017 1 Nivel4Homero Ruiz HernandezNo ratings yet
- Soft Educativo (Alvarado)Document14 pagesSoft Educativo (Alvarado)Anonymous wCKKL7pYOfNo ratings yet
- Exámenes de Certificación y Evaluación de CompetenciasDocument1 pageExámenes de Certificación y Evaluación de CompetenciasHomero Ruiz HernandezNo ratings yet
- Capitulo 3Document30 pagesCapitulo 3Yenny OrtegaNo ratings yet
- Problemas de Química BásicaDocument17 pagesProblemas de Química BásicaHomero Ruiz HernandezNo ratings yet
- Algebra TensorialDocument26 pagesAlgebra TensorialDiego TripicchioNo ratings yet
- 3 - Perceptron Multicapa PDFDocument18 pages3 - Perceptron Multicapa PDFDiego J RubioNo ratings yet
- Algebra TensorialDocument26 pagesAlgebra TensorialDiego TripicchioNo ratings yet
- TSP 332 2023-2Document6 pagesTSP 332 2023-2David MachillandaNo ratings yet
- Matemáticas II 5Document6 pagesMatemáticas II 5Víctor de Juan SanzNo ratings yet
- 3 MatricesDocument32 pages3 MatricesSergio BarbozaNo ratings yet
- Resolución de Los Ejercicios 2 y 12 de La Práctica 1Document4 pagesResolución de Los Ejercicios 2 y 12 de La Práctica 1Agustín PaceNo ratings yet
- Linea DL Tiempo Algebra (Siglo XIX 1800-1900)Document2 pagesLinea DL Tiempo Algebra (Siglo XIX 1800-1900)Guadalupe CarrilloNo ratings yet
- Tarea 2Document7 pagesTarea 2jenny vargasNo ratings yet
- Algebra Lineal Unidad 2Document7 pagesAlgebra Lineal Unidad 2Marvin Reyes GómezNo ratings yet
- Geometría Vectorial en R3 - Eduardo Espinoza Ramos-MiBibliotecaVirtual PDFDocument183 pagesGeometría Vectorial en R3 - Eduardo Espinoza Ramos-MiBibliotecaVirtual PDFMartina Isidora Aedo Leiva50% (2)
- 1er Grupo - Vectores - FisicaDocument31 pages1er Grupo - Vectores - FisicaMilagros Quispe PisconteNo ratings yet
- Unidad 3 Fase 5 - Post Tarea - Grupo 28Document20 pagesUnidad 3 Fase 5 - Post Tarea - Grupo 28lgmartinezgNo ratings yet
- Algebra Lineal Ambiental. InstrumentaciónDocument8 pagesAlgebra Lineal Ambiental. InstrumentaciónIselda Cruz100% (1)
- PR Ctica10 Con La Calculadora Classpad 300 PlusDocument13 pagesPR Ctica10 Con La Calculadora Classpad 300 PlusArlex Ricardo Guillen PetitNo ratings yet
- Primera Evaluacion de Algebra LinealDocument5 pagesPrimera Evaluacion de Algebra LinealJoselyne PerezNo ratings yet
- Tema 1Document12 pagesTema 1Delfina LopezNo ratings yet
- Taller Alg LinDocument23 pagesTaller Alg Linmiguel.vega02No ratings yet
- Tarea 1 Algebra LINEALDocument4 pagesTarea 1 Algebra LINEALFernandoAndreeFloresEspinosaNo ratings yet
- Tarea 1 - Vectores Matrices y DeterminantesDocument29 pagesTarea 1 - Vectores Matrices y DeterminantesAna MorenoNo ratings yet
- Ejercicios4 EspaciosVectorialesDocument9 pagesEjercicios4 EspaciosVectorialesAndrea MartinezNo ratings yet
- AlgebraLineal S1 PDocument6 pagesAlgebraLineal S1 PMICHAEL KERRIGANNo ratings yet
- Espacio Vectorial EuclídeoDocument17 pagesEspacio Vectorial EuclídeoMirko Alexandro Hernández SantanaNo ratings yet
- Rotacional de Una Función VectorialDocument7 pagesRotacional de Una Función VectorialJason Novoa NietoNo ratings yet
- S06.s1 - PPT Producto de VectoresDocument12 pagesS06.s1 - PPT Producto de VectoresManuel LezamaNo ratings yet
- Tarea 2-Carlos AtehortuaDocument14 pagesTarea 2-Carlos AtehortuaMarco AngelNo ratings yet
- 2012 II Examen III C Bmat - 05 Algebra Lineal y Bsi - 31 Matematica II RDocument3 pages2012 II Examen III C Bmat - 05 Algebra Lineal y Bsi - 31 Matematica II RMichaelfl06No ratings yet
- Algebra NuevoDocument13 pagesAlgebra NuevoDaniela RicoNo ratings yet
- Pud 4 TerceroDocument5 pagesPud 4 TerceroStalin FernandezNo ratings yet
- EXCEL A DESARROLLAR Matriz Peligro Movimiento MasasDocument28 pagesEXCEL A DESARROLLAR Matriz Peligro Movimiento Masaswalker soberonNo ratings yet
- Calendario Academico Imi Marzo 2023 - RemotoDocument3 pagesCalendario Academico Imi Marzo 2023 - RemotoSofia NearNo ratings yet
- Solución Ayudantía 2Document6 pagesSolución Ayudantía 2THOMAS VON PLESSINGNo ratings yet
- Problemas de Flujo de Costo MínimoDocument32 pagesProblemas de Flujo de Costo MínimoHector Llanos Valencia78% (9)