You might also like
- Cpa 296552 PDFDocument2 pagesCpa 296552 PDFGathy BrayohNo ratings yet
- .MX Claroline Backends DownloadDocument4 pages.MX Claroline Backends DownloadHeriberto EspinosaNo ratings yet
- Zeros and Poles Transfer FunctionsDocument158 pagesZeros and Poles Transfer FunctionsGathy BrayohNo ratings yet
- 451 Exercise451 - Rev - S18Document2 pages451 Exercise451 - Rev - S18Gathy BrayohNo ratings yet
- Wave Guides Summary and ProblemsDocument11 pagesWave Guides Summary and ProblemsGathy BrayohNo ratings yet
- E1asoln Ece302 sp06Document8 pagesE1asoln Ece302 sp06Gathy BrayohNo ratings yet
- MTDC REFsDocument8 pagesMTDC REFsGathy BrayohNo ratings yet
- Design and Implementation of Chopper-Stabilized AmplifiersDocument2 pagesDesign and Implementation of Chopper-Stabilized AmplifiersGathy BrayohNo ratings yet
- .MX Claroline Backends DownloadDocument4 pages.MX Claroline Backends DownloadHeriberto EspinosaNo ratings yet
- C13 1 CovDocument3 pagesC13 1 CovGathy BrayohNo ratings yet
- SpaceDocument3 pagesSpaceGathy BrayohNo ratings yet
- Example DocumentDocument18 pagesExample DocumentGathy BrayohNo ratings yet
- K. Cheng,: Is ofDocument2 pagesK. Cheng,: Is ofGathy BrayohNo ratings yet
- Mathhw9 SolnDocument2 pagesMathhw9 SolnGathy BrayohNo ratings yet
- Finance Department Finance InternDocument1 pageFinance Department Finance InternGathy BrayohNo ratings yet
- Sboa 212 ADocument5 pagesSboa 212 AGathy Brayoh100% (1)
- C13 1 CovDocument3 pagesC13 1 CovGathy BrayohNo ratings yet
- Statement: Google AdwordsDocument2 pagesStatement: Google AdwordsGathy BrayohNo ratings yet
- Machine Copy For Proofreading, Vol. X, Y-Z, 2004Document23 pagesMachine Copy For Proofreading, Vol. X, Y-Z, 2004Gathy BrayohNo ratings yet
- Induction Motor Chapter: Stator Resistance, Speed, Torque CalculationsDocument5 pagesInduction Motor Chapter: Stator Resistance, Speed, Torque CalculationsGathy BrayohNo ratings yet
- VSD Pumps Best PracticeDocument48 pagesVSD Pumps Best PracticebeechyNo ratings yet
- Distortionless Transmission Line TheoryDocument7 pagesDistortionless Transmission Line TheoryGathy BrayohNo ratings yet
- ELG3311: Assignment 3: Problem 6-12Document15 pagesELG3311: Assignment 3: Problem 6-12Gathy BrayohNo ratings yet
- Course Structure Diploma in ITDocument1 pageCourse Structure Diploma in ITGathy BrayohNo ratings yet
- Web Development Quotation: What About It?Document4 pagesWeb Development Quotation: What About It?Gathy BrayohNo ratings yet
- TLDocument16 pagesTLMannanHarshaNo ratings yet
- Lab 1Document26 pagesLab 1Gathy BrayohNo ratings yet
- Audience Data: Age and Gender SplitDocument23 pagesAudience Data: Age and Gender SplitGathy BrayohNo ratings yet
- CCC502 Course OutlineDocument3 pagesCCC502 Course OutlineGathy BrayohNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CHAP5DECIMALSDocument24 pagesCHAP5DECIMALSZacariah SaadiehNo ratings yet
- AVCCDocument3 pagesAVCCTanya WilkersonNo ratings yet
- CX Nsz20ezDocument28 pagesCX Nsz20ezelectrofrio07No ratings yet
- RDA5815S: DVB-S/S2 Satellite TunerDocument2 pagesRDA5815S: DVB-S/S2 Satellite TunerFerara PutriNo ratings yet
- IBQManualeDocument5 pagesIBQManualebrema zoeNo ratings yet
- Pulse ModulationDocument63 pagesPulse ModulationAbhishek DadhichNo ratings yet
- Cambridge University Engineering Department Trumpington Street, Cambridge, England, CB2 1PZDocument4 pagesCambridge University Engineering Department Trumpington Street, Cambridge, England, CB2 1PZBhuvan GuptaNo ratings yet
- Practica Laboratorio N°2 Transfer FunctionsDocument12 pagesPractica Laboratorio N°2 Transfer FunctionsJordano Obregon PizarroNo ratings yet
- Filteri Rad MatDocument19 pagesFilteri Rad MatPaulo Diego AguileraNo ratings yet
- Chapter 3 Two Port NetworkDocument52 pagesChapter 3 Two Port NetworkPhotography KidNo ratings yet
- ADC Part B ProgramsDocument12 pagesADC Part B ProgramsSahana ShaviNo ratings yet
- DSP Lab Matlab ProgramsDocument6 pagesDSP Lab Matlab ProgramsGaurav ReddyNo ratings yet
- SS Previous PaperDocument7 pagesSS Previous PaperAshokNo ratings yet
- Study On Digital Image Processing SystemDocument4 pagesStudy On Digital Image Processing SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Signals and Systems Question BankDocument15 pagesSignals and Systems Question Bankanjum samreenNo ratings yet
- Stationary Frame Current Regulation of PWM Inverters With Zero Steady State ErrorsDocument9 pagesStationary Frame Current Regulation of PWM Inverters With Zero Steady State ErrorsUday MujumdarNo ratings yet
- Service manual for Marantz CD recorder DR4050Document64 pagesService manual for Marantz CD recorder DR4050cdebonoNo ratings yet
- JBL Cabaret 4625Document4 pagesJBL Cabaret 4625a.ansaniNo ratings yet
- Dspa 17ec751 M5Document34 pagesDspa 17ec751 M5digital loveNo ratings yet
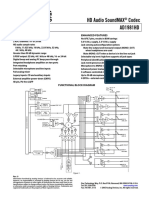
- HD Audio Soundmax Codec Ad1981Hd: Features Enhanced FeaturesDocument16 pagesHD Audio Soundmax Codec Ad1981Hd: Features Enhanced FeatureseloigneeNo ratings yet
- Low-Power, 2-Channel, 24-Bit Analog Front-End For Biopotential MeasurementsDocument74 pagesLow-Power, 2-Channel, 24-Bit Analog Front-End For Biopotential MeasurementsSwati SinghNo ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument45 pagesELE 301: Signals and Systems: Prof. Paul CuffdioumbNo ratings yet
- Compressor - Expanders, Limiters and GatesDocument4 pagesCompressor - Expanders, Limiters and GatesBojan Argaroth ĐokićNo ratings yet
- Emb DSP1Document263 pagesEmb DSP1pranavdingare23No ratings yet
- Comparative Analysis Between DCT & DWT Techniques of Image CompressionDocument9 pagesComparative Analysis Between DCT & DWT Techniques of Image CompressionsaravananramanNo ratings yet
- Enhancer Block GuideDocument4 pagesEnhancer Block GuideNikko Rafael NoblezaNo ratings yet
- Ss FormulaeDocument32 pagesSs FormulaeSharmila AmalaNo ratings yet
- Mcq-For-Dip With SolutionDocument55 pagesMcq-For-Dip With SolutionAkkilNo ratings yet