You might also like
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Population Logistics Chemical EthanolDocument8 pagesPopulation Logistics Chemical EthanolTuling, Jose Jr., D.No ratings yet
- Math Series Interval of ConvergenceDocument3 pagesMath Series Interval of ConvergenceBakari HamisiNo ratings yet
- Maqola UchunDocument4 pagesMaqola UchunAzizbek AxmatovNo ratings yet
- Practice Problems: Trig SubstitutionDocument6 pagesPractice Problems: Trig SubstitutionJanry GarciaNo ratings yet
- Solutii Baraj SenioriDocument18 pagesSolutii Baraj SenioriBogdan RăileanuNo ratings yet
- R2solsDocument3 pagesR2solsxesef93262No ratings yet
- Series by FourierDocument6 pagesSeries by FourierMandela Bright QuashieNo ratings yet
- Trigonometric Substitution: Institute of Mathematics University of The Philippines-DilimanDocument14 pagesTrigonometric Substitution: Institute of Mathematics University of The Philippines-DilimanAllen Lois LanuzaNo ratings yet
- Math 121A: Homework 7 SolutionsDocument9 pagesMath 121A: Homework 7 SolutionscfisicasterNo ratings yet
- Alevelsb p2 Ex8mixDocument10 pagesAlevelsb p2 Ex8mixmocarellachedderNo ratings yet
- Problems and solutions for NCUMC 2018Document7 pagesProblems and solutions for NCUMC 2018Glory OlalereNo ratings yet
- Practice Final SolutionsDocument10 pagesPractice Final SolutionsPedro Duran MonteleoneNo ratings yet
- UEM Sol To Exerc Chap 055Document9 pagesUEM Sol To Exerc Chap 055janvincentcentinoNo ratings yet
- 03 3definite Integration 69-79Document8 pages03 3definite Integration 69-79eamcetmaterialsNo ratings yet
- HW 6 SolutionsDocument3 pagesHW 6 SolutionsAntonioNo ratings yet
- Repeating QR Method StepsDocument15 pagesRepeating QR Method Stepsd4v1d66No ratings yet
- Solutions to MATH-1730-03 Winter 2021 Quiz ThreeDocument3 pagesSolutions to MATH-1730-03 Winter 2021 Quiz ThreeSafdar HussainNo ratings yet
- MAT1B1 Section7.5 - Strategy - For - IntDocument15 pagesMAT1B1 Section7.5 - Strategy - For - IntNastassja BiccardNo ratings yet
- Math 234, Practice Test #4Document6 pagesMath 234, Practice Test #4H Aries OñaNo ratings yet
- Tutorial 14 AnswerDocument10 pagesTutorial 14 AnswerFlavus J.No ratings yet
- Zetacoursenotes 2Document21 pagesZetacoursenotes 2walter huNo ratings yet
- Review of Random Loading Concepts IIDocument6 pagesReview of Random Loading Concepts IIstefanNo ratings yet
- Chpt7 Techniques of IntegrationDocument16 pagesChpt7 Techniques of IntegrationVittoNo ratings yet
- 1 Introduction To Differential Equation: 1.1 Definition and TerminologyDocument7 pages1 Introduction To Differential Equation: 1.1 Definition and TerminologyLynx101No ratings yet
- Solving PDEs using separation of variables and Fourier seriesDocument3 pagesSolving PDEs using separation of variables and Fourier seriesNguyễn TàiNo ratings yet
- Definite IntegrationDocument8 pagesDefinite IntegrationKarthik BingiNo ratings yet
- Putnam 1997 Problems and Solutions AnalysisDocument18 pagesPutnam 1997 Problems and Solutions AnalysisAbir MahmudNo ratings yet
- Deq11 Final SolDocument3 pagesDeq11 Final Sol陳浚維No ratings yet
- 2011 蔡淳仁 FinalDocument3 pages2011 蔡淳仁 Final陳浚維No ratings yet
- MAT397 SP 11 Practice Exam 2 SolutionsDocument7 pagesMAT397 SP 11 Practice Exam 2 SolutionsRuben VelasquezNo ratings yet
- IIT - PCM-2003 With Solutions PDFDocument32 pagesIIT - PCM-2003 With Solutions PDFShubham KumarNo ratings yet
- Section 8.3Document4 pagesSection 8.3Janry GarciaNo ratings yet
- Lecture 10 Trig SubstitutionDocument3 pagesLecture 10 Trig SubstitutionNazifullah KakarNo ratings yet
- MATH161 (13) Calculus I 2016 Exam 2Document4 pagesMATH161 (13) Calculus I 2016 Exam 2유지인No ratings yet
- Features Integration of Differential Binomial: DX BX A X P N MDocument4 pagesFeatures Integration of Differential Binomial: DX BX A X P N Mابو سامرNo ratings yet
- Gamma Fun.Document8 pagesGamma Fun.prithviraj gavhaneNo ratings yet
- Trigonometric Equations SolutionsDocument33 pagesTrigonometric Equations Solutionspurandar puneetNo ratings yet
- Trigo SubstitutionDocument4 pagesTrigo SubstitutionAdobo ToyoNo ratings yet
- Substitution Variable Ref1Document19 pagesSubstitution Variable Ref1Christian Paskah WNo ratings yet
- Trig integrals & trig subsDocument6 pagesTrig integrals & trig subsjunaidadilNo ratings yet
- MATB23+2021 08 17 - SolDocument4 pagesMATB23+2021 08 17 - SolDiego GonzálezNo ratings yet
- × Cos XDX: Intended Learning OutcomesDocument13 pages× Cos XDX: Intended Learning OutcomesPaul Henry Patricio BSABE 2ANo ratings yet
- Fourier Series ExplainedDocument3 pagesFourier Series ExplainedmoosemeatNo ratings yet
- BAS110 - Chapter 10 - Parametric EquationsDocument31 pagesBAS110 - Chapter 10 - Parametric EquationsAyman ElashmawyNo ratings yet
- 1 Math Fundamentals: 1.1 Integrals, Factors and TechniquesDocument11 pages1 Math Fundamentals: 1.1 Integrals, Factors and Techniquesroy_gettyNo ratings yet
- Differential and Integral Calculus 2 - Homework 2 SolutionDocument5 pagesDifferential and Integral Calculus 2 - Homework 2 SolutionDominikNo ratings yet
- Substitution Variable To Solve Partial Differential EquationDocument19 pagesSubstitution Variable To Solve Partial Differential EquationChristian Paskah WNo ratings yet
- FINAL-Solutions SONUÇDocument4 pagesFINAL-Solutions SONUÇZeynep BayramNo ratings yet
- Problem 26 from Section 7.3 in StewartDocument3 pagesProblem 26 from Section 7.3 in StewartWill RodríguezNo ratings yet
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghNo ratings yet
- LarCalc9 ch08 Sec4 Trigonometric Substitution5Document24 pagesLarCalc9 ch08 Sec4 Trigonometric Substitution5Ken DitchonNo ratings yet
- MATHS 102 - Week6 - Section 7.2-7.3Document51 pagesMATHS 102 - Week6 - Section 7.2-7.3ridha2359No ratings yet
- Review of Number System ZDocument22 pagesReview of Number System ZDev KumarNo ratings yet
- Differential Equations SolutionsDocument3 pagesDifferential Equations Solutions陳浚維No ratings yet
- Ellipse Length PDFDocument2 pagesEllipse Length PDFLikhitha AkkapalliNo ratings yet
- Answer 2016Document8 pagesAnswer 2016John ChanNo ratings yet
- 2012 Applications of Differentiation Barely Passed PDFDocument8 pages2012 Applications of Differentiation Barely Passed PDFDouglas TanNo ratings yet
- MTH4100 Calculus I: Lecture Notes For Week 3 Thomas' Calculus, Sections 1.5, 1.6, 2.1, 2.2 and 2.4Document14 pagesMTH4100 Calculus I: Lecture Notes For Week 3 Thomas' Calculus, Sections 1.5, 1.6, 2.1, 2.2 and 2.4Roy VeseyNo ratings yet
- Derivative of Some Transcendental FunctionsDocument8 pagesDerivative of Some Transcendental FunctionsAlfred BOzzNo ratings yet
- READING PASSAGE 1 Test 2Document6 pagesREADING PASSAGE 1 Test 2Nguyên BùiNo ratings yet
- Unit 2 - Writing Task 1 - Bar Chart Sample TestDocument2 pagesUnit 2 - Writing Task 1 - Bar Chart Sample TestNguyên BùiNo ratings yet
- H-O ExcerciseDocument1 pageH-O ExcerciseNguyên BùiNo ratings yet
- M14 Krugman 46657 09 IE C14 FDocument50 pagesM14 Krugman 46657 09 IE C14 FlucipigNo ratings yet
- (Update-3ed) TEEN 2 - STUDENT BOOK - MAY2018 PDFDocument18 pages(Update-3ed) TEEN 2 - STUDENT BOOK - MAY2018 PDFNguyên BùiNo ratings yet
- Theories of International TradeDocument18 pagesTheories of International TradeNguyên BùiNo ratings yet
- T2 Les 7 L+GR StudentDocument17 pagesT2 Les 7 L+GR StudentNguyên BùiNo ratings yet
- Writing Tests 2019 - 2020Document14 pagesWriting Tests 2019 - 2020Nguyên BùiNo ratings yet
- Writing Tests 2019 - 2020Document14 pagesWriting Tests 2019 - 2020Nguyên BùiNo ratings yet
- Collins Track 23 - 32Document19 pagesCollins Track 23 - 32Nguyên BùiNo ratings yet
- Why Almost Everybody Wins? - Author: Giovanni PeriDocument28 pagesWhy Almost Everybody Wins? - Author: Giovanni PeriNguyên BùiNo ratings yet
- Immigration and ComplementariesDocument8 pagesImmigration and ComplementariesNguyên BùiNo ratings yet
- The Economics of ImmigrationDocument4 pagesThe Economics of ImmigrationNguyên BùiNo ratings yet
- Krugman PPT c11Document26 pagesKrugman PPT c11Nguyên BùiNo ratings yet
- Chapter 2 LecturesDocument28 pagesChapter 2 LecturesNguyên BùiNo ratings yet
- Econ 181: Int'l Trade Homework SolutionsDocument9 pagesEcon 181: Int'l Trade Homework Solutionschoiinho1050% (2)
- Chapter 3Document29 pagesChapter 3Nguyên BùiNo ratings yet
- Andrew MitchellDocument20 pagesAndrew MitchellPradeep ChintadaNo ratings yet
- Chapter 5qDocument24 pagesChapter 5qNguyên BùiNo ratings yet
- Chapter 2 ProblemsDocument3 pagesChapter 2 ProblemsNguyên BùiNo ratings yet
- i-Educator website and Facebook pageDocument16 pagesi-Educator website and Facebook pageNguyên BùiNo ratings yet
- The Standard Trade Model: Slides Prepared by Thomas BishopDocument56 pagesThe Standard Trade Model: Slides Prepared by Thomas BishopNguyên BùiNo ratings yet
- Listening Final TestDocument6 pagesListening Final TestNguyên BùiNo ratings yet
- Name Three Things That...Document2 pagesName Three Things That...Aliona CasiadiNo ratings yet
- Passive Voice - Grammar in UseDocument6 pagesPassive Voice - Grammar in UseNguyên BùiNo ratings yet
- The Standard Trade Model: Slides Prepared by Thomas BishopDocument56 pagesThe Standard Trade Model: Slides Prepared by Thomas BishopNguyên BùiNo ratings yet
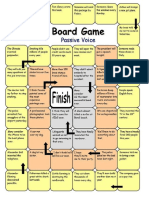
- Board GameDocument1 pageBoard GameNguyên BùiNo ratings yet
- Reported Speech - MacmillanDocument8 pagesReported Speech - MacmillanNguyên Bùi100% (2)
- Vocabulary Games and Activities PDFDocument143 pagesVocabulary Games and Activities PDFLo NoNo ratings yet
- IELTS Listening Sample 10 - 13Document6 pagesIELTS Listening Sample 10 - 13Nguyên Bùi100% (1)
- 3.3 Special Products and FactoringDocument37 pages3.3 Special Products and FactoringLorraine LacuestaNo ratings yet
- Introduction To Conic SectionsDocument20 pagesIntroduction To Conic Sectionssir jjNo ratings yet
- Grade 9Document4 pagesGrade 9Wennie CawisNo ratings yet
- Simultaneous EquationsDocument2 pagesSimultaneous EquationsWONG SIEW HEE MoeNo ratings yet
- Sydney Grammar 2017 Year 10 Maths HY & SolutionsDocument18 pagesSydney Grammar 2017 Year 10 Maths HY & SolutionsMatthew ChengNo ratings yet
- TOS Link Test Item Analysis More Than 40 ItemsDocument11 pagesTOS Link Test Item Analysis More Than 40 ItemsleogarybonNo ratings yet
- MA1000 Lecture NotesDocument189 pagesMA1000 Lecture NotesVeeNo ratings yet
- Fourier Series: Periodic FunctionDocument20 pagesFourier Series: Periodic Functiontareq omarNo ratings yet
- Mathematics Sequence Series MCQDocument6 pagesMathematics Sequence Series MCQGhazala Shaheen100% (2)
- Strategic Intervention Material in Math-4Document23 pagesStrategic Intervention Material in Math-4Marecil Yamit100% (1)
- Math 154Document7 pagesMath 154memphisNo ratings yet
- Calculas FormulasDocument2 pagesCalculas FormulasSaurabh Ray100% (1)
- TOFAS検定システムDocument1 pageTOFAS検定システムJeffriel SisonNo ratings yet
- Engineering Mathematics - II: NotesDocument36 pagesEngineering Mathematics - II: NotesSelvi SelvarajNo ratings yet
- Fractions (Discussion)Document7 pagesFractions (Discussion)Jennifer ArcadioNo ratings yet
- Solving Quadratic Equations Using The FormulaDocument6 pagesSolving Quadratic Equations Using The FormulaSameh SalahNo ratings yet
- Activity Learning Sheet Grade 9Document27 pagesActivity Learning Sheet Grade 9Mheiabelle SagunNo ratings yet
- 6-7 Solving Systems of Linear InequalitiesDocument36 pages6-7 Solving Systems of Linear InequalitiesGrace SangalangNo ratings yet
- Understanding nth Roots and Radical ExpressionsDocument82 pagesUnderstanding nth Roots and Radical ExpressionsKeppy AricangoyNo ratings yet
- DLL Grade 8Document7 pagesDLL Grade 8Cherose LumboNo ratings yet
- Converting Fractions To Decimals: Grade 6 Fraction WorksheetDocument2 pagesConverting Fractions To Decimals: Grade 6 Fraction WorksheetshilpaNo ratings yet
- Math 7Document1 pageMath 7Maribel PepitoNo ratings yet
- Fractions Add and Subtract With PicturesDocument2 pagesFractions Add and Subtract With Picturesapi-370541284No ratings yet
- Unit # 2 Theory of Quadratic EquationsDocument36 pagesUnit # 2 Theory of Quadratic EquationsAsghar Ali83% (6)
- Rational and Irrational NumbersDocument14 pagesRational and Irrational NumbersMoloy GoraiNo ratings yet
- Fraction Beed2a Elem5Document27 pagesFraction Beed2a Elem5Christine CamaraNo ratings yet
- C1 Questions From Past PapersDocument24 pagesC1 Questions From Past PapersSemaNo ratings yet
- Surds and Indices I Important Facts and Formulae IDocument5 pagesSurds and Indices I Important Facts and Formulae Iz1y2No ratings yet
- Algebraic FractionsDocument4 pagesAlgebraic FractionsFocasan Rence-TeNo ratings yet
- Special Products and FactoringDocument10 pagesSpecial Products and FactoringjoshNo ratings yet