You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter 2 - Calculus I - MATH 203Document53 pagesChapter 2 - Calculus I - MATH 203habeebjobahNo ratings yet
- EE 372 Communication Engineering Problem Set #1: Fourier SeriesDocument9 pagesEE 372 Communication Engineering Problem Set #1: Fourier SerieshabeebjobahNo ratings yet
- Basic Electronics by Cel PhonDocument12 pagesBasic Electronics by Cel PhonhabeebjobahNo ratings yet
- SignalsDocument24 pagesSignalshabeebjobahNo ratings yet
- Fundamentals of Welding-Part 01Document34 pagesFundamentals of Welding-Part 01habeebjobahNo ratings yet
- Example Res ReportDocument9 pagesExample Res ReporthabeebjobahNo ratings yet
- AP23170 Hold Music ICDocument30 pagesAP23170 Hold Music ICYachnaNo ratings yet
- Digital Electronics ExamDocument4 pagesDigital Electronics ExamPeter JumreNo ratings yet
- Question Bank of DMPDocument4 pagesQuestion Bank of DMPdarisbennisonNo ratings yet
- Sony hcd-gnz7d gnz8d gnz9d Ver1.1Document108 pagesSony hcd-gnz7d gnz8d gnz9d Ver1.1Gerardo GuadarramaNo ratings yet
- B.SC (Computer Science) 2019 PatternDocument101 pagesB.SC (Computer Science) 2019 Patternraut9657991617No ratings yet
- Binary Coded DecimalDocument4 pagesBinary Coded DecimalKelvin YipNo ratings yet
- Data SheetDocument12 pagesData SheetpunithNo ratings yet
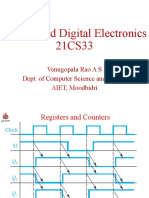
- Analog and Digital Electronics 21CS33: Venugopala Rao A S Dept. of Computer Science and Design AIET, MoodbidriDocument40 pagesAnalog and Digital Electronics 21CS33: Venugopala Rao A S Dept. of Computer Science and Design AIET, MoodbidrivenuraoNo ratings yet
- Apb CodeDocument25 pagesApb CodeVikas ZurmureNo ratings yet
- Spansion S25FL256S - 32MB SPI FlashromDocument149 pagesSpansion S25FL256S - 32MB SPI FlashromcockNo ratings yet
- Maacpmicro1 Eng PDFDocument221 pagesMaacpmicro1 Eng PDFSarah SalinasNo ratings yet
- Sir Syed University of Engineering & Technlogy, Karachi LDST Final 2012Document2 pagesSir Syed University of Engineering & Technlogy, Karachi LDST Final 2012Faisal Yazdanie0% (1)
- M74HC595B1Document13 pagesM74HC595B1GeorgeNo ratings yet
- Chapter 7 - Flip FlopsDocument12 pagesChapter 7 - Flip FlopsAmeer AzharNo ratings yet
- Cs 302 Short NotesDocument4 pagesCs 302 Short Notessaad100% (4)
- D-67 D-67L D-67F DX-12 D-Ur: Standard Digital ReceiversDocument1 pageD-67 D-67L D-67F DX-12 D-Ur: Standard Digital Receiversjean riveraNo ratings yet
- VLSI Lab Assignment Final AjithDocument44 pagesVLSI Lab Assignment Final Ajithsndpkv4999No ratings yet
- 626 Manual BDocument48 pages626 Manual BClaudio Braganca MirandaNo ratings yet
- Digital Electronics Interview QuestionsDocument5 pagesDigital Electronics Interview QuestionsetasureshNo ratings yet
- 9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPDocument165 pages9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPvijay kumar GuptaNo ratings yet
- Analysis and Design of Regenerative Comparators For Low Offset and NoiseDocument14 pagesAnalysis and Design of Regenerative Comparators For Low Offset and Noiseantonio ScacchiNo ratings yet
- EEE 248 CNG 232: LogicDocument6 pagesEEE 248 CNG 232: LogicARSALANNo ratings yet
- DSD Dica Lab ManualDocument63 pagesDSD Dica Lab Manualram100% (3)
- Design of A High Speed 6 Bit Successive Approximate Register Analog To Digital Converter SAR ADC Using 45nm CMOS TechnologyDocument10 pagesDesign of A High Speed 6 Bit Successive Approximate Register Analog To Digital Converter SAR ADC Using 45nm CMOS TechnologyTENS DeviceNo ratings yet
- STRG6653Document8 pagesSTRG6653perro sNo ratings yet
- Vlsi TestingDocument79 pagesVlsi Testingkarnika143No ratings yet
- Punjab Technical University: Scheme& Syllabus of B. Tech. Electronics & Communication Engineering (ECE)Document71 pagesPunjab Technical University: Scheme& Syllabus of B. Tech. Electronics & Communication Engineering (ECE)Maninder SinghNo ratings yet
- Latches and Flip-FlopsDocument7 pagesLatches and Flip-FlopspresumidololoNo ratings yet
- Service Manual: Active Subwoofer Speaker SystemDocument16 pagesService Manual: Active Subwoofer Speaker SystemJonathan Vasquez ConeoNo ratings yet