You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ams 2406Document8 pagesAms 2406Anonymous T6GllLl0No ratings yet
- A. E. Beck (Auth.) - Physical Principles of Exploration Methods - An Introductory Text For Geology and Geophysics Students (1981, Macmillan Education UK)Document240 pagesA. E. Beck (Auth.) - Physical Principles of Exploration Methods - An Introductory Text For Geology and Geophysics Students (1981, Macmillan Education UK)EdilberNo ratings yet
- AS 1358-2004 - Bursting Discs and Devices PDFDocument45 pagesAS 1358-2004 - Bursting Discs and Devices PDFThaiminh VoNo ratings yet
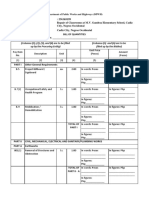
- BDS 23GK0058 RCPDocument6 pagesBDS 23GK0058 RCPEngr'Shemaiah JimenezNo ratings yet
- Department of Public Works and HighwaysDocument1 pageDepartment of Public Works and HighwaysEngr'Shemaiah JimenezNo ratings yet
- 23GK0092 - MagsaysayDocument5 pages23GK0092 - MagsaysayEngr'Shemaiah JimenezNo ratings yet
- 23GK0058Document5 pages23GK0058Engr'Shemaiah JimenezNo ratings yet
- BDS 23GK0187Document6 pagesBDS 23GK0187Engr'Shemaiah JimenezNo ratings yet
- BDS 23GK0200Document6 pagesBDS 23GK0200Engr'Shemaiah JimenezNo ratings yet
- Boq 23GK0187Document5 pagesBoq 23GK0187Engr'Shemaiah JimenezNo ratings yet
- Cost Estimating EssentialsDocument3 pagesCost Estimating EssentialsEngr'Shemaiah JimenezNo ratings yet
- II III: Department of Public Works and HighwaysDocument1 pageII III: Department of Public Works and HighwaysEngr'Shemaiah JimenezNo ratings yet
- Philippine Bid - Docs 23GK0199Document32 pagesPhilippine Bid - Docs 23GK0199Engr'Shemaiah JimenezNo ratings yet
- BDS 23GK0200Document6 pagesBDS 23GK0200Engr'Shemaiah JimenezNo ratings yet
- 23GK0199 - BoqDocument6 pages23GK0199 - BoqEngr'Shemaiah JimenezNo ratings yet
- 23GK0200 - BoqDocument6 pages23GK0200 - BoqEngr'Shemaiah JimenezNo ratings yet
- Ipcr Field JimenezDocument6 pagesIpcr Field JimenezEngr'Shemaiah JimenezNo ratings yet
- Thermoplastic Traffic PaintDocument132 pagesThermoplastic Traffic PaintEngr'Shemaiah JimenezNo ratings yet
- Do 249 s2022Document42 pagesDo 249 s2022Engr'Shemaiah JimenezNo ratings yet
- Meca-J #2022-1997 - Shemaiah Khristian Jimenez - Nov 30, 2022 - Booking ConfirmationDocument2 pagesMeca-J #2022-1997 - Shemaiah Khristian Jimenez - Nov 30, 2022 - Booking ConfirmationEngr'Shemaiah JimenezNo ratings yet
- Cover Page SagayDocument1 pageCover Page SagayEngr'Shemaiah JimenezNo ratings yet
- Materials Logbook 2021Document86 pagesMaterials Logbook 2021Engr'Shemaiah JimenezNo ratings yet
- Office of The SecretaryDocument150 pagesOffice of The Secretaryaj100% (9)
- Department of Public Works and Highways: Central OfficeDocument1 pageDepartment of Public Works and Highways: Central OfficeEngr'Shemaiah JimenezNo ratings yet
- Estimate of A Reservoir - 2.5x2.5x2.5Document4 pagesEstimate of A Reservoir - 2.5x2.5x2.5Engr'Shemaiah JimenezNo ratings yet
- Department of Public Works and Highways: Central OfficeDocument5 pagesDepartment of Public Works and Highways: Central OfficeEngr'Shemaiah JimenezNo ratings yet
- Letter To The Brgy. CaptainDocument2 pagesLetter To The Brgy. CaptainEngr'Shemaiah JimenezNo ratings yet
- Letter To The Brgy. JerusalemDocument2 pagesLetter To The Brgy. JerusalemEngr'Shemaiah JimenezNo ratings yet
- Office of The SecretaryDocument150 pagesOffice of The Secretaryaj100% (9)
- BID DOC DFPC CONST PROJ Part 2 PDFDocument309 pagesBID DOC DFPC CONST PROJ Part 2 PDFSherwin Aguirre0% (1)
- Letter To The Brgy. JerusalemDocument2 pagesLetter To The Brgy. JerusalemEngr'Shemaiah JimenezNo ratings yet
- Department of Public Works and Highways Negros Occidental 1 District Engineering OfficeDocument1 pageDepartment of Public Works and Highways Negros Occidental 1 District Engineering OfficeEngr'Shemaiah JimenezNo ratings yet
- Letter To The Brgy. MagsaysayDocument2 pagesLetter To The Brgy. MagsaysayEngr'Shemaiah JimenezNo ratings yet
- Experiment 6 - 3DDocument22 pagesExperiment 6 - 3DPoh Ching HongNo ratings yet
- Assignment 8 9Document2 pagesAssignment 8 9Nuwan BandaraNo ratings yet
- Product Development Processes A Case Study in Sustainable Product Design: Herman Miller, IncDocument2 pagesProduct Development Processes A Case Study in Sustainable Product Design: Herman Miller, Incarbitid01No ratings yet
- Plastics - Polyacrylamide Materials - Designation System and SpecificationDocument20 pagesPlastics - Polyacrylamide Materials - Designation System and SpecificationDevesh Kumar PandeyNo ratings yet
- Graphitisation Cast IronDocument28 pagesGraphitisation Cast IronKurnia BijaksanaNo ratings yet
- TANCET - Basic Engineering and Science 2012Document15 pagesTANCET - Basic Engineering and Science 2012suresh693No ratings yet
- Basic Structure - Harold VengerDocument14 pagesBasic Structure - Harold VengerHarold VengerNo ratings yet
- Metal Spinning PDFDocument86 pagesMetal Spinning PDFloosenut100% (1)
- Section F S-6001 (2008) Bearing Temperature PerformanceDocument2 pagesSection F S-6001 (2008) Bearing Temperature Performanceslowrie151No ratings yet
- Effect of Heat Treatment On Microstructure and Mechanical Behaviours of 18ni-300 Maraging Steel Manufactured by Selective Laser MeltingDocument11 pagesEffect of Heat Treatment On Microstructure and Mechanical Behaviours of 18ni-300 Maraging Steel Manufactured by Selective Laser MeltingHasan TaşNo ratings yet
- Pulp and PaperDocument18 pagesPulp and PaperAbhishek AwasthiNo ratings yet
- Mary Kom Case StudyDocument24 pagesMary Kom Case StudysahilNo ratings yet
- Astm f136 Rev ADocument4 pagesAstm f136 Rev AAhmad BrianNo ratings yet
- Cutting FluidDocument8 pagesCutting FluidDevarakonda KondayyaNo ratings yet
- 11.7 States of Matter PhET LabDocument2 pages11.7 States of Matter PhET LabCoacytTucumanNo ratings yet
- Thermal Physics Assignment 2013Document10 pagesThermal Physics Assignment 2013asdsadNo ratings yet
- Hesss LawDocument15 pagesHesss LawAriAnggoroNo ratings yet
- Algorithm For Isothermal Reactor DesignDocument39 pagesAlgorithm For Isothermal Reactor DesignGhazy alshyalNo ratings yet
- Magnetic SeparatorsDocument18 pagesMagnetic SeparatorskarthicknlNo ratings yet
- Kde Pa KDF Pa KDG Pa KDH PaDocument1 pageKde Pa KDF Pa KDG Pa KDH PafalanksNo ratings yet
- Abs 0678Document11 pagesAbs 0678Jorge OrtegaNo ratings yet
- Yara Fertilizer Industry Handbook: February 2014Document90 pagesYara Fertilizer Industry Handbook: February 2014douglasminasNo ratings yet
- Strange Balance: The TankDocument10 pagesStrange Balance: The TankPredaarshan V ChandranNo ratings yet
- EES Lecture 3 and 4 AssignmentDocument2 pagesEES Lecture 3 and 4 AssignmentMarcelo GuerraNo ratings yet
- Nsejs Exam Solutions Paper 2019Document27 pagesNsejs Exam Solutions Paper 2019EDat UthuberNo ratings yet
- Engineering Materials: Mechanism in MetalsDocument38 pagesEngineering Materials: Mechanism in Metalssamurai7_77No ratings yet
- Zeon Productguide 20150717Document16 pagesZeon Productguide 20150717khushboo.mamtani2932No ratings yet