International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
RESEARCH ARTICLE OPEN ACCESS
A study of Edge Detection Techniques
1
MS. Nabanita Basu ,2 Prof.Samir Kumar Bandyopadhyay
Department of Computer Science and Engineering, University of Calcutta, JD Block Salt Lake, Sector III, Kolkata,
700098, India
Abstract:
An edge is a sharp discontinuity or a significant change in local intensity of an image. The process for tracking
the edge of various components in an image is referred to as edge detection. Edge detector operators is classified into two
basic types, namely, Gradient based or first order derivative based edge detectors and second order derivative based edge
detectors. This paper describes these two algorithms in detail along with stepwise image examples.
Keywords — Edge Detection, Sobel Edge Detector, Marr Hildrith edge detector.
Introduction Edge detector operators can particularly be
classified into two basic types, namely, Gradient
An edge is defined as a sharp discontinuity or a based or first order derivative based edge detectors
significant change in local intensity of an image. and second order derivative based edge detectors.
The sharp change in pixel intensity value in an The gradient vector for each point in a 2D image is
image is referred to as edge. The technique of calculated for the horizontal and vertical direction.
tracking the edge of various components in an The gradient vectors are combined to obtain the
image is referred to as edge detection. Edge gradient for each point. The Sobel edge detector,
detection is aimed at marking out continuous lines which is an improvement on Robert’s edge detector
in an image. The objective of most computer vision algorithm, is a gradient based edge detector. The
algorithms is to undertake imagesegmentation in Laplacian of Gaussian or Marr Hildrith edge
order to identify the specific components in a given detector relies on second order derivative for edge
image. Edge detection often plays an integral role in detection. Slope of the zero crossing points of the
demarcating image component/s of relevance. The second order derivative of the image is used to
component/s of interest is referred to as the Region estimate the edges for the image. The threshold
of interest within the image processing/Computer value tuning for both the edge detector algorithms is
Vision domain. Edge detection essentially partitions susceptible to vary from one image to another.This
an image into non-overlapping regions, thereby, paper illustrates these two algorithms in detail along
contributing to the process of Region of Interest with stepwise image examples.
extraction.
Review Works
Edge-based segmentation finds application in
different image analysis domains, namely medical The basic task for edge detection process is to
and biomedical image analysis such as abnormality reduce the amount of data to be processed while at
detection, tissue measurement, surgical planning the same time storing useful information about
and simulation, biological feature identification etc. object boundaries [1-2]. The high pass filters are
Edge detection algorithms also find application in used in the process of identifying the image by
Geographical Information systems, remote sensing locating the sharp edges which are discontinuous.
images and industrial machine vision problems. These discontinuities changes in pixels intensities
which define the boundaries of the object[3]. The
ISSN: 2455-135X http://www.ijcsejournal.org Page 13
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
edge detection aims to identify points in a digital illumination. Each image was of size 298 by 200.
image at which the image brightness changes Dataset 3 consisted of in-house images extracted
sharply or abruptly. Image edge detection mainly frame-wise from a motion video. Each image/video
deals with extracting edges in an image by frame extracted from the video is of size 720 by
identifying pixels where the intensity variation is 1280.
very high.[4] Edges are used to measure the size of
objects in an image; to isolate particular objects Sobel Edge Detector
from their background; to recognize or classify The Sobel edge detection algorithm can broadly be
objects.[4-5] classified into 4 basic steps, namely, Image
Methodology derivative computation in the x-direction, Image
derivative computation in the y-direction, Gradient
Sobel edgedetector algorithm coupled with Otsu’s magnitude computation and thresholding to obtain
threshold selection methodology was used to mark the Sobel edges of the image. Unlike conversion of
out the edges of images from 3 datasets, namely, an RGB image to grayscale, in the implemented
Berkeley Segmentation Dataset and Benchmark algorithm each RGB image was represented as 3
BSDS500, Shapes database, In-House Natural grayscale images, one representing the Red Channel
Images database. Again, Marr-Hildrith algorithm Values alone and the other two representing the
was used for edge detection on the 3 datasets. Blue and Green color channel values respectively.
For each color channel image, the aforementioned
Dataset Selected/Developed steps were independently executed. Otsu
The Berkeley Segmentation Dataset consists of thresholding for each channel was independently
performed and the edge image for each channel was
varied RGB colored images (particularly outdoor
merged to obtain the final edge map for the given
images) along with the segmentation ground truth.
Size of each RGB image is 481 by 321. The edge image(Fig. 1). As opposed to the conventional
detection algorithms, Sobel and Marr-Hildrith were method of converting an image to grayscale and
then computation of horizontal and vertical
tested on a total of 200 test images. Unlike the
convolution, the channel based method helps
BSDS database, the Shapes database developed
consisted of images of homogeneous coloring and minimize information loss thereby facilitating
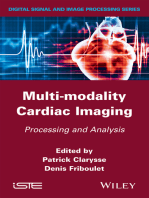
clearer edge detection (Fig. 2)
RGB Input Horizontal
Red Channel Component (Gx)
Image
Final Image -Otsu
+ thresholding
applied to gradient
image[R channel]
Vertical
Blue Channel Component (Gy)
Final Edge Map for
Green Channel Red, Green and Blue
combined to obtain
final edge map
ISSN: 2455-135X http://www.ijcsejournal.org Page 14
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
Figure 1: Graphical flow chart of the Sobel Edge detection algorithm implemented
Edge map computed from
grayscale image
Edge map computed by
concatenating edge map of Red,
Green and Blue Channel
Figure 2: Each color channel was used to develop independent edge map as opposed to computing the edge
map from grayscale version of the image in order to minimize information loss in the final edge map. The ‘WEE’
is much less clear in the grayscale based edge map
Image derivative computation in x-direction
1 0 −1
With the use of matrixS = 2 0 −2 the horizontal gradient was computed. Each color channel of the
1 0 −1
RGB image was convoluted with the given matrix. Figure 3 represent the horizontal gradient for a
randomly selected image from dataset 3. Similar technique could be used for horizontal gradient
computation of a grayscale image.
ISSN: 2455-135X http://www.ijcsejournal.org Page 15
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
(a) (b)
(c)
Figure 3: Horizontal Gradient of the Image for the (a) Red (b) Green and (c) Blue Channel
Image derivative computation in y-direction
1 2 1
Transpose of matrix S (i.e., 0 0 0 ) was used to calculate the vertical gradient for each color
−1 −2 −1
channel of an RGB image. Figure 4a, 4b and 4c represent the vertical gradient for a randomly selected
image from dataset 3. Vertical gradient computation of a grayscale image can be computed using the
same technique.
ISSN: 2455-135X http://www.ijcsejournal.org Page 16
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
(a) (b)
(c)
Figure 4: Vertical Gradient of the Image for the (a) Red (b) Green and (c) Blue Channel
Gradient magnitude computation and threshold value selectionThe gradient magnitude ( ) was
computed using the equation = + and it is shown in (Fig.5). After computation of the
Gradient magnitude for each color channel in a RGB image. Otsu threshold was computed independently
for the red, green and blue color channel respectively in a RGB image. Based on the threshold value, edge
map corresponding to each color channel in a RGB image was computed. Another similar technique
could be used for edge detection in a grayscale image. The final edge map for the RGB image was
computed by concatenating the edge maps obtained for each color channel (Fig.6).
ISSN: 2455-135X http://www.ijcsejournal.org Page 17
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
(a) (b)
(c)
Figure 5: Combined Gradient of the Image for the (a) Red (b) Green and (c) Blue Channel
(a) (b)
(c)
Figure 6: Edge Map of the Image for the (a) Red (b) Green and (c) Blue Channel
ISSN: 2455-135X http://www.ijcsejournal.org Page 18
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
Marr-Hildrith edge detector
Unlike the Sobel operator, the Marr-Hildrith edge detector is sensitive to noise. So blurring or
smoothening of an image using a 2D Gaussian filter is performed to minimize high frequency noise in an
image. This step helps prepare the image for edge detection using the Laplacian of Gaussian technique.
The Laplacian operator is applied to the filtered image. Owing to the associative nature of the convolution
function, the output for convolving a Gaussian filtered image by a Laplacian kernel is by far similar to the
application of Laplacian of the Gaussian to the convolution of an image. This requires fewer
mathematical operations as the Laplacian and Gaussian kernel are by far much smaller in size as
compared to the image. Again, pre-calculation of the Laplacian of Gaussian in advance calls for only one
convolution at runtime.At the onset a squared Gaussian kernel is developed for a particular size(denoted
by N) and standard deviation(denoted by sigma). The 2D Laplacian of Gaussian or the second derivative
of the image centered on zero with standard deviation was computed using the equation
1 +
∆ =− 1−
2
The LoG kernel was normalized and discretized, so that all values of the LoG kernel lie in the [-255,
+255]. Empirically a kernel size of 9 and standard deviation of 1.4 was selected for convolution of any
image. Convolution of the same image with a kernel size of 3 and standard deviation of 0.6, kernel size of
7 and standard deviation 1 result in under-representation and over representation with inclusion of
spurious edges respectively. Again, convolution of image with discrete Laplacian of Gaussian kernel of
size 17 and standard deviation 1.4 results in inclusion of false/spurious edges. Figure 7 represents the
edges identified by use of different kernel size (i.e. N) and values on a randomly selected image from
dataset 3.
(a)
(b)
(c)
ISSN: 2455-135X http://www.ijcsejournal.org Page 19
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
Figure 7: Marr Hildrith Edge Map of the Image for (a) N=3, sigma=0.6 (b) N=7, sigma=1 (c) N=17.
Sigma=1.4
Again, by convention, for Marr Hildrith edge detection, a RGB image is converted to grayscale after
which Laplacian of Gaussian operator is applied to the same. To preserve maximum image information
and minimize information loss, convolution is independently performed for each of the 3 color channels
using the same discrete Laplacian of Gaussian kernel. For the convolutions obtained, zero crossing
positions are then marked out. Zero crossing positions can broadly be classified into two basic types,
namely, real zero crossing points({-,0,+},{+,0,-}) and expected zero cross points({-,+},{+,-}). A zero
cross point (i.e. real and expected) are marked with the slope of the crossover. For points of value ‘a’ and
‘–b’, the slope was calculated as sum of the absolute value of ‘a’ and ‘b’. Thereafter Otsu threshold value
was calculated for each zero cross over map obtained for each color channel. After Otsu thresholding, the
3 edge maps were added to obtain the final Marr-Hildrith edge map for a given RGB image. A single
channel based similar technique can also be utilized for a grayscale image. Figure 8 represents the
channel based edges detected for each image randomly selected from dataset 3.
(b)
(a)
(c)
(d)
Figure 8: (a) Zero Crossing image for red channel of image (b) Otsu thresholding of zero crossing image for
red channel (c) Otsu thresholding of zero crossing image for green channel (d) Otsu thresholding of zero
Results and Discussion
Figure 9 represents the image edge maps obtained for the same image using the Sobel operator and the
Marr-Hildrith operator. Visual perception of the edge maps reveal that while Marr Hildrith preserves
detailed edge information, Sobel operator concentrates more on preserving the strong edge information
ISSN: 2455-135X http://www.ijcsejournal.org Page 20
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
while neglecting the weaker ones. However, the Sobel operator or Marr-Hildrith application for edge
detection is particularly based on the segmentation need of the concerned problem and color distribution
of image.
Edge Map of Image obtained using
Sobel Operator
Edge Map of Image obtained using
Marr-Hildrith Operator
Figure 9: Edge maps for an image using Sobel operator and Marr Hildrithoperator (N=9, sigma=1.4)
Conclusions
The Sobel edge detector, which is an
improvement on Robert’s edge detector References
algorithm, is a gradient based edge detector. The 1. Andreas Koschan and Mongi Abidi,
Laplacian of Gaussian or Marr Hildrith edge “Detection and Classification of Edges
detector relies on second order derivative for in Color Images” IEEE Signal
edge detection. Slope of the zero crossing points Processing Magazine January 2005.
of the second order derivative of the image is
used to estimate the edges for the image. These 2. Harpreet Singh, Er. Mandeep Kaur, “A
two are discussed in the paper. Review:Sobel Canny Hybrid Theoretical
Approach & LOG Edge Detection
Techniques for Digital Image,”
ISSN: 2455-135X http://www.ijcsejournal.org Page 21
International Journal of Computer science engineering Techniques-– Volume 2 Issue 5, July - Aug 2017
International Journal of Computer 4. Er. Komal Sharma, Er. Navneet Kaur
Science & Engineering Technology “Comparative Analysis of Various Edge
February 2015. Detection Techniques” December 2013.
3. Mohamed D Almadhoun, “Improving 5. R.Jayakumar, B.Suresh “A REVIEW
And Measuring Color Edge Detection ON EDGE DETECTION METHODS
Algorithm in RGB Color Space,” ANDTECHNIQUES”, International
International Journal of Digital Journal of Advanced Research in
Information and Wireless Computer and Communication
Communications, 2013. Engineering April 2014.
ISSN: 2455-135X http://www.ijcsejournal.org Page 22
You might also like
- Soal Bahasa InggrisDocument7 pagesSoal Bahasa InggrisPelkeh Prianda25% (16)
- Motion Programming For ComauDocument318 pagesMotion Programming For ComauEddie Scarpa100% (1)
- Heat Transfer Chapter 1 IntroductionDocument68 pagesHeat Transfer Chapter 1 IntroductionsubratorajNo ratings yet
- Lab Experiment#08: Edge DetectionDocument6 pagesLab Experiment#08: Edge Detectionume habibaNo ratings yet
- Sketch-to-Sketch Match With Dice Similarity MeasuresDocument6 pagesSketch-to-Sketch Match With Dice Similarity MeasuresInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Improved Color Edge Detection by Fusion of Hue, PCA & Hybrid CannyDocument8 pagesImproved Color Edge Detection by Fusion of Hue, PCA & Hybrid CannyVijayakumarNo ratings yet
- Edge Detection For Face Image Using Multiple FiltersDocument14 pagesEdge Detection For Face Image Using Multiple Filterseditor ijeratNo ratings yet
- Simplified Novel Method For Edge Detection in Digital ImagesDocument6 pagesSimplified Novel Method For Edge Detection in Digital ImagesBasanagouda NavadagiNo ratings yet
- Edge Detection Techniques for Image SegmentationDocument5 pagesEdge Detection Techniques for Image SegmentationArivazhagan ArtNo ratings yet
- Study and Comparison of Various Image EdDocument12 pagesStudy and Comparison of Various Image EdSharmin SathiNo ratings yet
- MC0086Document14 pagesMC0086puneetchawla2003No ratings yet
- Image Segmentation TechniquesDocument8 pagesImage Segmentation TechniquesShrikant TirkiNo ratings yet
- Segmentation of Tiles Image Using Various Edge Detection TechniquesDocument5 pagesSegmentation of Tiles Image Using Various Edge Detection TechniquesIIR indiaNo ratings yet
- A Review Paper On Image SegmentationDocument3 pagesA Review Paper On Image SegmentationPREET GADANo ratings yet
- Overview and Comparative Analysis of Edge Detection Techniques in Digital Image ProcessingDocument8 pagesOverview and Comparative Analysis of Edge Detection Techniques in Digital Image ProcessingMohammed AnsafNo ratings yet
- AS R - B A C - B I S: Tudy OF Egion Ased ND Ontour Ased Mage EgmentationDocument8 pagesAS R - B A C - B I S: Tudy OF Egion Ased ND Ontour Ased Mage EgmentationsipijNo ratings yet
- Edge Detection PDFDocument12 pagesEdge Detection PDFchaithra580No ratings yet
- DSP Exp 10 StudentDocument4 pagesDSP Exp 10 StudentCaptain Jack SparrowNo ratings yet
- Optimized Edge Detection Technique For Brain Tumor Detection in MR ImagesDocument17 pagesOptimized Edge Detection Technique For Brain Tumor Detection in MR ImagesPadmavathy VelayudhamNo ratings yet
- 13-Detecção de Sinais de Trânsito Usando MatlabDocument4 pages13-Detecção de Sinais de Trânsito Usando MatlabIsabela LopesNo ratings yet
- Image Segmentation and Detection Using Watershed Transform and Region Based Image RetrievalDocument6 pagesImage Segmentation and Detection Using Watershed Transform and Region Based Image RetrievalInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Survey On Image Processing Techniques.Document4 pagesA Survey On Image Processing Techniques.Sreeni VasuluNo ratings yet
- Ijetae 0112 51Document3 pagesIjetae 0112 51ppat2006No ratings yet
- 04-12-18 - Notice On 2nd Stage CBT - Section Wise MarksDocument6 pages04-12-18 - Notice On 2nd Stage CBT - Section Wise MarksraghuNo ratings yet
- Under The Guidance of Prof.V.Srinivasan: Submitted by K.GajalakshmiDocument26 pagesUnder The Guidance of Prof.V.Srinivasan: Submitted by K.GajalakshmigajusaranNo ratings yet
- A Fast Image Sharpness Algorithm ImplementationDocument6 pagesA Fast Image Sharpness Algorithm ImplementationijosatNo ratings yet
- University of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourDocument51 pagesUniversity of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourAhmed HwaidiNo ratings yet
- Modified Color Based Edge Detection of Remote Sensing Images Using Fuzzy LogicDocument5 pagesModified Color Based Edge Detection of Remote Sensing Images Using Fuzzy LogicInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDocument5 pagesDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretNo ratings yet
- FPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorDocument4 pagesFPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorseventhsensegroupNo ratings yet
- Denoising and Edge Detection Using SobelmethodDocument6 pagesDenoising and Edge Detection Using SobelmethodIJMERNo ratings yet
- Major Project Report 4th Year IT EDGE DETECTION FinalDocument51 pagesMajor Project Report 4th Year IT EDGE DETECTION FinalAnish Prasad86% (7)
- Edge Detection MethodsDocument7 pagesEdge Detection MethodsRg PNo ratings yet
- Gradient OperatorDocument5 pagesGradient Operatorchaithra580No ratings yet
- Image Segmentation PDFDocument6 pagesImage Segmentation PDFKrishna KumarNo ratings yet
- Effect of noise on image contour in spectral domainDocument54 pagesEffect of noise on image contour in spectral domainAhmed HwaidiNo ratings yet
- V5 I2 2016 Paper15Document6 pagesV5 I2 2016 Paper15IIR indiaNo ratings yet
- A Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013Document5 pagesA Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Simulink Model Based Image SegmentationDocument4 pagesSimulink Model Based Image Segmentationeditor_ijarcsseNo ratings yet
- Unit 2 CVDocument17 pagesUnit 2 CVBobbyNo ratings yet
- Anti-Personnel Mine Detection and Classification Using GPR ImageDocument4 pagesAnti-Personnel Mine Detection and Classification Using GPR ImageBHANDIWADMADHUMITANo ratings yet
- Council For Innovative Research: An Advanced Neural Network Based Method For Noise Removal and Edge DetectionDocument6 pagesCouncil For Innovative Research: An Advanced Neural Network Based Method For Noise Removal and Edge DetectionMay Thet TunNo ratings yet
- CAED Project PDFDocument5 pagesCAED Project PDFUsama AameerNo ratings yet
- 2021 - Feroza Mirajkar - IJ - An Extensive Survey On Edge Detection TechniquesDocument8 pages2021 - Feroza Mirajkar - IJ - An Extensive Survey On Edge Detection TechniquesS Vasu KrishnaNo ratings yet
- A New Framework For Color Image Segmentation Using Watershed AlgorithmDocument7 pagesA New Framework For Color Image Segmentation Using Watershed AlgorithmbudiNo ratings yet
- Edge Detectors: Deptofcs& EDocument26 pagesEdge Detectors: Deptofcs& Eishant7890No ratings yet
- Comparison of Edge Detection TechniquesDocument4 pagesComparison of Edge Detection TechniquesVeda SaiNo ratings yet
- Problem Statement 40Document8 pagesProblem Statement 40Let see With positiveNo ratings yet
- Edge Detection Region Based SegementationDocument57 pagesEdge Detection Region Based SegementationAakash PayalaNo ratings yet
- Image Segmentation Edge DetectionDocument18 pagesImage Segmentation Edge DetectionSrini VaasNo ratings yet
- Modified Canny Edge Detection with Variable SigmaDocument3 pagesModified Canny Edge Detection with Variable SigmaVijayakumarNo ratings yet
- Recognizing Pictures at An Exhibition Using SIFTDocument5 pagesRecognizing Pictures at An Exhibition Using SIFTAmit Kumar MondalNo ratings yet
- Silhouette Vanished Contour Discovery of Aerial View Images by Exploiting Pixel DivergenceDocument11 pagesSilhouette Vanished Contour Discovery of Aerial View Images by Exploiting Pixel DivergenceIAES IJAINo ratings yet
- Ijettcs 2014 10 14 66 PDFDocument4 pagesIjettcs 2014 10 14 66 PDFInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Image Retrieval Using Both Color and Texture FeaturesDocument6 pagesImage Retrieval Using Both Color and Texture Featuresdivyaa76No ratings yet
- Seminar Report Edge Detection ComparisonDocument20 pagesSeminar Report Edge Detection ComparisonNikhil JoyNo ratings yet
- Performance Evaluation of Edge Detection Techniques For Images in Spatial DomainDocument8 pagesPerformance Evaluation of Edge Detection Techniques For Images in Spatial DomainJiwa AbdullahNo ratings yet
- E I R U R B I R: Fficient Mage Etrieval Sing Egion Ased Mage EtrievalDocument13 pagesE I R U R B I R: Fficient Mage Etrieval Sing Egion Ased Mage EtrievalsipijNo ratings yet
- 3d ScanningDocument15 pages3d ScanningRodrigo Bagatin100% (1)
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESFrom EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNo ratings yet
- Multi-modality Cardiac Imaging: Processing and AnalysisFrom EverandMulti-modality Cardiac Imaging: Processing and AnalysisPatrick ClarysseNo ratings yet
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerFrom EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNo ratings yet
- A Heuristic Approach For The Independent Set Problem: AbstractDocument6 pagesA Heuristic Approach For The Independent Set Problem: AbstractISAR-PublicationsNo ratings yet
- Ijcse V2i5p1Document6 pagesIjcse V2i5p1ISAR-PublicationsNo ratings yet
- Stable Cloud Federations in The Sky: Formation Game and MechanismDocument9 pagesStable Cloud Federations in The Sky: Formation Game and MechanismISAR-PublicationsNo ratings yet
- Ijcse V2i1p1Document6 pagesIjcse V2i1p1ISAR-PublicationsNo ratings yet
- Ijcse V2i3p4Document6 pagesIjcse V2i3p4ISAR-PublicationsNo ratings yet
- A Secure Search Scheme of Encrypted Data On Mobile Cloud: AbstractDocument11 pagesA Secure Search Scheme of Encrypted Data On Mobile Cloud: AbstractISAR-PublicationsNo ratings yet
- Graph Database-An Overview of Its Applications and Its TypesDocument5 pagesGraph Database-An Overview of Its Applications and Its TypesISAR-PublicationsNo ratings yet
- Ijcse V2i4p6Document15 pagesIjcse V2i4p6ISAR-PublicationsNo ratings yet
- Image Hiding Technique Based On Secret Fragment Visible Mosaic ImageDocument6 pagesImage Hiding Technique Based On Secret Fragment Visible Mosaic ImageISAR-PublicationsNo ratings yet
- A Study of Load Balancing Algorithm On Cloud Computing: AbstractDocument5 pagesA Study of Load Balancing Algorithm On Cloud Computing: AbstractISAR-PublicationsNo ratings yet
- Ijcse V2i1p2Document6 pagesIjcse V2i1p2ISAR-PublicationsNo ratings yet
- Ijcse V2i2p1Document5 pagesIjcse V2i2p1ISAR-PublicationsNo ratings yet
- Ijcse V1i4p4Document9 pagesIjcse V1i4p4ISAR-PublicationsNo ratings yet
- Ijcse V1i4p5Document8 pagesIjcse V1i4p5ISAR-PublicationsNo ratings yet
- Ijcse V1i4p1Document8 pagesIjcse V1i4p1ISAR-PublicationsNo ratings yet
- PSMPA: Patient Self-Controllable and Multi-Level Privacy-Preserving Cooperative Authentication in Distributed M-Healthcare Cloud Computing SystemDocument8 pagesPSMPA: Patient Self-Controllable and Multi-Level Privacy-Preserving Cooperative Authentication in Distributed M-Healthcare Cloud Computing SystemISAR-PublicationsNo ratings yet
- Automatic Subtitle Generation in Real-Time: AbstractDocument5 pagesAutomatic Subtitle Generation in Real-Time: AbstractISAR-PublicationsNo ratings yet
- Distributing Immediate Social Video Facility Across Multiple CloudsDocument4 pagesDistributing Immediate Social Video Facility Across Multiple CloudsISAR-PublicationsNo ratings yet
- Ijcse V1i3p1Document14 pagesIjcse V1i3p1ISAR-PublicationsNo ratings yet
- Ijcse V1i2p2 PDFDocument9 pagesIjcse V1i2p2 PDFISAR-PublicationsNo ratings yet
- Information Technology Tool in Library Online Public Access Catalog (OPAC)Document3 pagesInformation Technology Tool in Library Online Public Access Catalog (OPAC)ISAR-PublicationsNo ratings yet
- Information Technology Tool in Library Online Public Access Catalog (OPAC)Document3 pagesInformation Technology Tool in Library Online Public Access Catalog (OPAC)ISAR-PublicationsNo ratings yet
- Ijcse V1i1p1Document4 pagesIjcse V1i1p1ISAR-PublicationsNo ratings yet
- Automatic Subtitle Generation in Real-Time: AbstractDocument5 pagesAutomatic Subtitle Generation in Real-Time: AbstractISAR-PublicationsNo ratings yet
- Ijcse V1i1p4Document3 pagesIjcse V1i1p4ISAR-PublicationsNo ratings yet
- Cloud Computing Security Issues Problem and Strategy: AbstractDocument4 pagesCloud Computing Security Issues Problem and Strategy: AbstractISAR-PublicationsNo ratings yet
- Ijcse V1i2p2 PDFDocument9 pagesIjcse V1i2p2 PDFISAR-PublicationsNo ratings yet
- Ijcse V1i1p5Document4 pagesIjcse V1i1p5ISAR-PublicationsNo ratings yet
- Ijcse V1i1p3Document5 pagesIjcse V1i1p3ISAR-PublicationsNo ratings yet
- Astronomy Unit Resources SchoolpointeDocument17 pagesAstronomy Unit Resources SchoolpointeShekel DeninoNo ratings yet
- BEYOND SYLLABUS: CURVED, COMPOSITE, UNSYMMETRICAL BEAMSDocument11 pagesBEYOND SYLLABUS: CURVED, COMPOSITE, UNSYMMETRICAL BEAMSVignesh VickyNo ratings yet
- 960 Physics (PPU) Semester 2 Topics-SyllabusDocument7 pages960 Physics (PPU) Semester 2 Topics-SyllabusJosh, LRT0% (1)
- Materials Finer Than 75 - M (No. 200) Sieve in Mineral Aggregates by WashingDocument3 pagesMaterials Finer Than 75 - M (No. 200) Sieve in Mineral Aggregates by WashingLucio Rodriguez SifuentesNo ratings yet
- Chapter 22 Thermal Expansion: EXERCISE 122, Page 266Document9 pagesChapter 22 Thermal Expansion: EXERCISE 122, Page 266NurulAinMatAron0% (1)
- Filter Vessel Calculations Per As Me Viii 1Document40 pagesFilter Vessel Calculations Per As Me Viii 1Anonymous J1vjrU2No ratings yet
- Analysis of The Tablet Coating ProcessDocument17 pagesAnalysis of The Tablet Coating Processشروق سعد الدينNo ratings yet
- Flight Equations of Motion for 6 DOF Aircraft ModelDocument24 pagesFlight Equations of Motion for 6 DOF Aircraft ModelNeetu SharmaNo ratings yet
- Elzaki Transform For Two Tank Mixing Problems PDFDocument15 pagesElzaki Transform For Two Tank Mixing Problems PDFMarvin LabajoNo ratings yet
- BelowsDocument35 pagesBelowstejassidhpuraNo ratings yet
- Heat and Temperature Unit3 - T4 - T6 PDFDocument28 pagesHeat and Temperature Unit3 - T4 - T6 PDFhiren_mistry55No ratings yet
- Cluster ExpansionDocument4 pagesCluster ExpansionflytrapsolNo ratings yet
- Chemical Process Instrumentation: Pressure Measurement: Moderate and High Pressure Measuring InstrumentsDocument10 pagesChemical Process Instrumentation: Pressure Measurement: Moderate and High Pressure Measuring InstrumentslvrevathiNo ratings yet
- Maths IA IntroDocument20 pagesMaths IA Introshakthi aravinthNo ratings yet
- Meteorology and Wind Resource Geostrophic BalanceDocument10 pagesMeteorology and Wind Resource Geostrophic BalanceSilvio NunesNo ratings yet
- Curtain Wall System From Technal - Geode-BrochureDocument38 pagesCurtain Wall System From Technal - Geode-BrochurebatteekhNo ratings yet
- Jar TestDocument1 pageJar TestEduardo Tonino Chavez GaytanNo ratings yet
- Pure Substances Mixtures and SolutionsDocument18 pagesPure Substances Mixtures and SolutionsJoanna Angela LeeNo ratings yet
- Norma Japonesa Aij-Rlb-1996Document36 pagesNorma Japonesa Aij-Rlb-1996AnaApcarianNo ratings yet
- Agco Type81sek PDFDocument15 pagesAgco Type81sek PDFMargaret DaughertyNo ratings yet
- Tutorial Chapter 1 2018Document3 pagesTutorial Chapter 1 2018Ain Syahira0% (1)
- Ultrasonic Diffraction in LiquidsDocument5 pagesUltrasonic Diffraction in LiquidsSampriti ShomeNo ratings yet
- Diagnostic Fracture Injection Tests in Ultra Low Perm FormationsDocument6 pagesDiagnostic Fracture Injection Tests in Ultra Low Perm FormationsBolsec14No ratings yet
- Heat of Hydration StressesDocument7 pagesHeat of Hydration StressesAnkur BarsainyaNo ratings yet
- MCQ Electromagnetism Self-AssessmentDocument2 pagesMCQ Electromagnetism Self-AssessmentJunaidKhanNo ratings yet
- Reviewer in Electricity and MagnetismDocument3 pagesReviewer in Electricity and MagnetismWayne David C. PadullonNo ratings yet
- NextFEM Designer Users Manual v1.10 p3Document96 pagesNextFEM Designer Users Manual v1.10 p3Anonymous kBodCGQ79No ratings yet