You might also like
- Depth Estimation Using CNN With Transfer LearningDocument15 pagesDepth Estimation Using CNN With Transfer LearningUmang SoniNo ratings yet
- Depth Estimation Using CNN With Transfer LearningDocument15 pagesDepth Estimation Using CNN With Transfer LearningUmang SoniNo ratings yet
- Curriculum for Mechanical Draughtsman TrainingDocument28 pagesCurriculum for Mechanical Draughtsman TrainingUmang SoniNo ratings yet
- Knowledge Representation Proposition LogicDocument10 pagesKnowledge Representation Proposition LogicKiran WadeyarNo ratings yet
- Transportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengDocument17 pagesTransportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengUmang SoniNo ratings yet
- WELDER (Dual Mode) : Under Dual Training SystemDocument33 pagesWELDER (Dual Mode) : Under Dual Training SystemUmang SoniNo ratings yet
- Workshop Calculation and Science SyllabusDocument2 pagesWorkshop Calculation and Science SyllabusUmang SoniNo ratings yet
- 2008 09 PDFDocument20 pages2008 09 PDFRobin CookNo ratings yet
- Trade Theory Welder-SyllabusDocument4 pagesTrade Theory Welder-SyllabusUmang SoniNo ratings yet
- Trade Theory - Draughtsman-SyllabusDocument6 pagesTrade Theory - Draughtsman-SyllabusUmang SoniNo ratings yet
- Simulated AnnealinDocument55 pagesSimulated AnnealinsithansakthiNo ratings yet
- List of JournalsDocument1 pageList of JournalsUmang SoniNo ratings yet
- The Origin Destination Airport Choice For All Cargo Aircraft Operations in Europe - 2016 - Transportation Research Part E Logistics and Transportation RevDocument22 pagesThe Origin Destination Airport Choice For All Cargo Aircraft Operations in Europe - 2016 - Transportation Research Part E Logistics and Transportation RevUmang SoniNo ratings yet
- Transportation Research Part E: Dong-Ping Song, Andrew Lyons, Dong Li, Hossein SharifiDocument22 pagesTransportation Research Part E: Dong-Ping Song, Andrew Lyons, Dong Li, Hossein SharifiUmang SoniNo ratings yet
- Evaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFDocument19 pagesEvaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFUmang SoniNo ratings yet
- Case Study Project Selection - BMWDocument24 pagesCase Study Project Selection - BMWUmang SoniNo ratings yet
- Integrated Recovery of Aircraft and Passengers After Airline Operation Disruption Based On A GRASP Algorithm 2016 Transportation Research Part E LogisDocument16 pagesIntegrated Recovery of Aircraft and Passengers After Airline Operation Disruption Based On A GRASP Algorithm 2016 Transportation Research Part E LogisUmang SoniNo ratings yet
- Transportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengDocument17 pagesTransportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengUmang SoniNo ratings yet
- Examining Risk Priority Numbers in FMEA PDFDocument4 pagesExamining Risk Priority Numbers in FMEA PDFUmang SoniNo ratings yet
- Expert Systems With Applications: Ming-Lang TsengDocument11 pagesExpert Systems With Applications: Ming-Lang TsengUmang SoniNo ratings yet
- Evaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFDocument19 pagesEvaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFUmang SoniNo ratings yet
- AHPapls 1Document11 pagesAHPapls 1Raghu Vamsi PotukuchiNo ratings yet
- Robust Global Supply Chain Network Design Under Disruption and Uncertainty Considering Resilience Strategies A Parallel Memetic Algorithm For A Real L PDFDocument33 pagesRobust Global Supply Chain Network Design Under Disruption and Uncertainty Considering Resilience Strategies A Parallel Memetic Algorithm For A Real L PDFUmang SoniNo ratings yet
- AHPapls 1Document11 pagesAHPapls 1Raghu Vamsi PotukuchiNo ratings yet
- Solving An Integrated Operational Transportation Planning Problem With Forwarding Limitations - 2016 - Transportation Research Part E Logistics and TranspDocument18 pagesSolving An Integrated Operational Transportation Planning Problem With Forwarding Limitations - 2016 - Transportation Research Part E Logistics and TranspUmang SoniNo ratings yet
- COPing With UncerDocument1 pageCOPing With UncerUmang SoniNo ratings yet
- Case Study - Project Selection and Its Impact On The Successful Deployment of Six SigmaDocument21 pagesCase Study - Project Selection and Its Impact On The Successful Deployment of Six SigmaUmang SoniNo ratings yet
- Escalator's Arrangement 1. A Single Escalator Arrangement: August 2016 SemesterDocument10 pagesEscalator's Arrangement 1. A Single Escalator Arrangement: August 2016 SemesterUmang SoniNo ratings yet
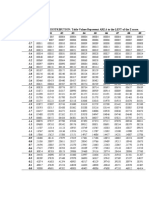
- STANDARD NORMAL DISTRIBUTION: Table Values Represent AREA To The LEFT of The Z ScoreDocument2 pagesSTANDARD NORMAL DISTRIBUTION: Table Values Represent AREA To The LEFT of The Z ScoreUmang SoniNo ratings yet
- An Interdependent Network Model for a Resilient Supply ChainDocument13 pagesAn Interdependent Network Model for a Resilient Supply ChainUmang SoniNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Borang Permohonan Pinjaman Pendidikan FMM Tunku Tan Sri Mohamed Study Loan Application FormDocument10 pagesBorang Permohonan Pinjaman Pendidikan FMM Tunku Tan Sri Mohamed Study Loan Application FormJom StadiNo ratings yet
- Earth / Ground Test (Version 1) : Za'immul Na'imDocument4 pagesEarth / Ground Test (Version 1) : Za'immul Na'imMd Rodi BidinNo ratings yet
- Thesis 2Document98 pagesThesis 2Chala WayesaNo ratings yet
- Commercial and EsplanadeDocument2 pagesCommercial and EsplanadeDanica Mae AmicayNo ratings yet
- Philippines Islands Judiciary Torrens System Title in Rem - BLP FoundationDocument2 pagesPhilippines Islands Judiciary Torrens System Title in Rem - BLP FoundationBLP CooperativeNo ratings yet
- 131b0314 - Im Danffos VLT ManualDocument108 pages131b0314 - Im Danffos VLT ManualMery Helen Barraza DelgadoNo ratings yet
- BITUMINOUS MIX DESIGNDocument4 pagesBITUMINOUS MIX DESIGNSunil BoseNo ratings yet
- Informatica Administrator Interview Questions and AnswersDocument3 pagesInformatica Administrator Interview Questions and Answersatoztarget100% (2)
- About 1,61,00,00,000 Results (0.20 Seconds) : All Books Shopping Videos More Settings ToolsDocument2 pagesAbout 1,61,00,00,000 Results (0.20 Seconds) : All Books Shopping Videos More Settings Toolsupen097No ratings yet
- Extreme Ware Command Ref 78Document2,652 pagesExtreme Ware Command Ref 78sol9159No ratings yet
- DAY 12 13 ExcerciseDocument3 pagesDAY 12 13 ExcercisevishnuselvaNo ratings yet
- The Strategies of Coca-Cola'S Expansion in The Globalization EraDocument12 pagesThe Strategies of Coca-Cola'S Expansion in The Globalization EraFathan MubinaNo ratings yet
- Negligence PRIMA FACIE CASEDocument107 pagesNegligence PRIMA FACIE CASEHarry KastenbaumNo ratings yet
- Service 31200800 11-13-13 CE-AUS English PDFDocument262 pagesService 31200800 11-13-13 CE-AUS English PDFduongpn100% (1)
- Asiignment 1 in TAX ADocument3 pagesAsiignment 1 in TAX ARonna Mae DungogNo ratings yet
- Stellarisware Release Notes: Sw-Rln-6852Document160 pagesStellarisware Release Notes: Sw-Rln-6852Akio TakeuchiNo ratings yet
- Barbara S. Hutchinson, Antoinette Paris-Greider Using The Agricultural, Environmental, and Food Literature Books in Library and Information Science 2002Document491 pagesBarbara S. Hutchinson, Antoinette Paris-Greider Using The Agricultural, Environmental, and Food Literature Books in Library and Information Science 2002Paramitha TikaNo ratings yet
- Blackbook Project On IT in Insurance - 163417596Document75 pagesBlackbook Project On IT in Insurance - 163417596Dipak Chauhan57% (7)
- Concrete Construction Article PDF Strategic Planning For ContractorsDocument4 pagesConcrete Construction Article PDF Strategic Planning For ContractorsMohammed NizamNo ratings yet
- Trudeau Prorogues Parliament: (HDFFC - 00003S /D.TDocument32 pagesTrudeau Prorogues Parliament: (HDFFC - 00003S /D.TBoki VaskeNo ratings yet
- Opposition To Motion For InjunctionDocument29 pagesOpposition To Motion For InjunctionBasseemNo ratings yet
- Disaster Risk Reduction and LivelihoodsDocument178 pagesDisaster Risk Reduction and LivelihoodsFeinstein International Center100% (1)
- Material Safety Data Sheet "Cut Back Bitumen": Section 1: Product and Company IdentificationDocument4 pagesMaterial Safety Data Sheet "Cut Back Bitumen": Section 1: Product and Company IdentificationPecel LeleNo ratings yet
- Resume Assignment v5 - Ps 4963 - Cloninger Ps t00111877Document1 pageResume Assignment v5 - Ps 4963 - Cloninger Ps t00111877api-666151731No ratings yet
- ZRO List 3.17Document4 pagesZRO List 3.17Com22No ratings yet
- Crack Detection & RepairDocument5 pagesCrack Detection & RepairHaftay100% (1)
- Master I M Lab ManualDocument44 pagesMaster I M Lab ManualwistfulmemoryNo ratings yet
- WEG Rectifier User Manual 10005817193 enDocument37 pagesWEG Rectifier User Manual 10005817193 endjunaedi djNo ratings yet
- MK84SUSDocument2 pagesMK84SUSali mortezaNo ratings yet
- Assessment of Cellular Planning Methods for GSMDocument5 pagesAssessment of Cellular Planning Methods for GSMradebasicNo ratings yet