Professional Documents
Culture Documents
VTU EC EBCS CCN Module2 Raghudathesh
Uploaded by
raghudatheshgpOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
VTU EC EBCS CCN Module2 Raghudathesh
Uploaded by
raghudatheshgpCopyright:
Available Formats
CCN 15ES64 Module 2 Lata S H Asst.
Professor
COMPUTER COMMUNICATION NETWORK (VTU) - 15EC64
MODULE - 2
Media Access Control: Random Access: ALOHA, CSMA, CSMA/CD, CSMA/CA. Controlled Access:
Reservation, Polling, Token Passing.
Wired LANs: Ethernet: Ethernet Protocol: IEEE802, Ethernet Evolution, Standard Ethernet:
Characteristics, Addressing, Access Method, Efficiency, Implementation, Fast Ethernet: Access Method,
Physical Layer, Gigabit Ethernet: MAC Sublayer, Physical Layer, 10 Gigabit Ethernet.
TEXT BOOKS:
P
1. Data Communication and Networking, B Forouzan, 5th Ed, TMH 2006.
2. Computer Networks, James F. Kurose, Keith W. Ross: Pearson education, 2nd Edition, 2003.
G
3. Introduction to Data communication and Networking, Wayne Tomasi: Pearson education 2007.
Special Thanks To:
Faculty (Chronological): Arun A Badiger (GMIT Davengere), Lata S H (GMIT Davengere), Dr.
h
Manjunath N (JNNCE Shimoga), Harisha G C (GMIT Davangere), Suresha V Sathegala (KVGCE
Sullia)
BY:
h es
RAGHUDATHESH G P
at
Asst Prof
ECE Dept, GMIT
ud
Davangere 577004
Cell: +917411459249
Website: raghudathesh.weebly.com
gh
Mail: datheshraghubooks@gmail.com
Quotes:
Ra
Great achievement always requires great sacrifice.
In life turn the pain into power for success.
A little progress each day adds up to big results.
If we are persistent, We will get it - If we are consistent we will keep it.
With trust even silence is understood. Without trust every word is misunderstood. Trust is the
soul of relationships.....
Dept. of ECE raghudathesh.weebly.com Page No - 1
CCN 15ES64 Module 2 Lata S H Asst. Professor
Media Access Control
Introduction:
Transmission technology can be categorized into two categories:
1. Point-to-point networks:
Point-to-point networks are those in which when a message is sent from one
computer to another, it usually has to be sent via other computers in the network.
P
A point-to-point network consists of many connections between individual pairs
of computers.
G
2. Broadcast networks:
Broadcast networks have a single communication channel that is shared by all the
machines on the network.
h
A packet sent by one computer is received by all other computers on the network.
es
The packets that are sent contain the address of the receiving computer; each
computer checks this field to see if it matches its own address
h
If it does not then it is usually ignored; if it does then it is read. Broadcast
at
channels are sometimes known as multi-access channel.
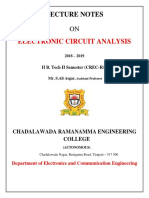
The data link layer sublayers:
ud
The data link layer has two sublayers as shown in figure below
gh
Ra
Figure: Data link layer divided into two functionality-oriented sub-layers
Dept. of ECE raghudathesh.weebly.com Page No - 2
CCN 15ES64 Module 2 Lata S H Asst. Professor
The upper sublayer in the figure above is responsible for data link control.
The lower sublayer is responsible for resolving access to the shared media.
If the channel is dedicated i.e, do not need the lower sub-layer (medium access).
IEEE has actually made this division for LANs. The upper sublayer that is responsible for
flow and error control is called the Logical Link Control (LLC) Layer. The lower
sublayer that is mostly responsible for multiple access resolution is called the Media
Access Control (MAC) Layer.
P
When nodes or stations are connected and use a common link, called a multipoint or
broadcast link, we need a multiple-access protocol to coordinate access to the link.
G
MAC coordinates transmission between users sharing the spectrum. The main goals are
to prevent collisions while maximizing throughput and minimizing delay.
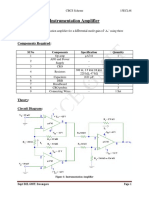
Many formal protocols have been devised to handle access to a shared link. MAC
h
protocol
es
Categorize them into three groups, shown in figure below
h
at
ud
gh
Ra
Figure: Taxonomy of multiple-access protocols
Dept. of ECE raghudathesh.weebly.com Page No - 3
CCN 15ES64 Module 2 Lata S H Asst. Professor
Random Access Protocols:
It is also called as contention methods as no station is superior to another station and
none is assigned control over another station.
In a random access method, each station has the right to the medium without being
controlled by any other station.
However, if more than one station tries to send, there is an access conflict leads to
collision and the frames will be either destroyed or modified.
P
To avoid access conflict or to resolve it when it happens, each station follows a procedure
that answers the following questions:
G
1. When can the station access the medium?
2. What can the station do if the medium is busy?
3. How can the station determine the success or failure of the transmission?
h
4. What can the station do if there is an access conflict?
es
Above conflicts are addressed by using following random Access protocols:
1. ALOHA
h
2. Carrier Sense Multiple Access (CSMA)
at
3. Carrier Sense Multiple Access with Collision Detection (CSMA/CD)
4. Carrier Sense Multiple Access with Collision Avoidance (CSMD/CA)
ud
ALOHA:
gh
It was the earliest random access method, developed at the University of Hawaii in early
1970.
Ra
It was designed for a radio (wireless) LAN, but it can be used on any shared medium.
Two types of ALOHA
Pure ALOHA
Slotted ALOHA
Dept. of ECE raghudathesh.weebly.com Page No - 4
CCN 15ES64 Module 2 Lata S H Asst. Professor
Pure ALOHA:
The Concept used in this protocol called “True Free for All”.
The original ALOHA protocol is called pure ALOHA.
Procedure for P-ALOHA:
Whenever a station has data, it transmits immediately
Receivers ACK all packets
No ACK means there is a collision. Wait a random time and retransmit
P
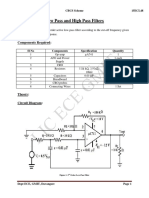
Figure below shows an example of frame collisions in pure ALOHA
G
h
h es
at
ud
gh
Figure: Frames in a pure ALOHA network
Ra
Figure above shows that only two frames survive: frame 1.1 from station 1 and frame 3.2
from station 3.
We need to mention that even if one bit of a frame coexists on the channel with one bit
from another frame, there is a collision and both will be destroyed.
If all these stations try to resend their frames after the time-out, the frames will collide
again.
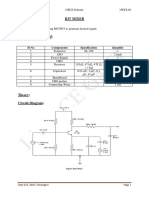
Algorithm for pure ALOHA protocol:
Dept. of ECE raghudathesh.weebly.com Page No - 5
CCN 15ES64 Module 2 Lata S H Asst. Professor
Pure ALOHA dictates that when the time-out period passes, each station waits a
random amount of time before resending its frame. The randomness will help
avoid more collisions. We call this time the “back-off time” TB.
P
G
h
h es
at
ud
Figure: Procedure for pure ALOHA protocol
gh
1. Pure ALOHA has a second method to prevent congesting the channel with
retransmitted frames.
Ra
2. After a maximum number of retransmission attempts Kmax' a station must give
up and try later.
3. Figure above shows the procedure for pure ALOHA based on the above strategy.
4. The time-out period is equal to the maximum possible round-trip propagation
delay, which is twice the amount of time required to send a frame between the
two most, widely separated stations (2xTp).
5. The back-off time TB is a random value that normally depends on K (the number
of attempted unsuccessful transmissions).
Dept. of ECE raghudathesh.weebly.com Page No - 6
CCN 15ES64 Module 2 Lata S H Asst. Professor
6. The formula for TB depends on the implementation. One common formula is the
binary exponential back-off. In this method, for each retransmission, a multiplier
in the range 0 to 2K - 1 is randomly chosen and multiplied by Tp (maximum
propagation time) or Tfr (the average time required to send out a frame) to find
TB. Note that in this procedure, the range of the random numbers increases after
each collision. The value of Kmax is usually chosen as 15.
Advantages:
1. Trivially simple
P
2. No coordination between participants necessary, Hence no need for
synchronization
G
3. No need for fixed length packets
4. Superior to fixed assignment when there is a large number of bursty stations.
h
5. Adapts to varying number of stations.
Disadvantages: es
1. Collision factor is high, hence less efficiency
h
2. Theoretically proven throughput maximum of 18.4%.
at
3. Requires queuing buffers for retransmission of packets.
ud
Problem1: The stations on a wireless ALOHA networks are a maximum of 600 km apart. If
we assume that signals propagate at 3 x 108 m/s, we find Tp = (600 x 105) / (3 x 108) = 2 ms.
Now we can find the value of TB for different values of K.
gh
Solution:
a. For K = 1, the range is {0, 1}. The station needs to generate a random number with a
Ra
value of 0 or 1. This means that TB is either ms (0 x 2) or 2 ms (l x 2), based on the
outcome of the random variable.
b. For K =2, the range is {0, 1, 2, 3}. This means that TB can be 0, 2, 4, or 6 ms, based
on the outcome of the random variable.
c. For K =3, the range is to, 1, 2, 3,4,5,6, 7}. This means that TB can be 0, 2, 4, ... ,14
ms, based on the outcome of the random variable.
d. We need to mention that if K > 10, it is normally set to 10.
Dept. of ECE raghudathesh.weebly.com Page No - 7
CCN 15ES64 Module 2 Lata S H Asst. Professor
Vulnerable Time:
The length of time in which there is a possibility of collision called “vulnerable time”
P
G
Figure: Vulnerable time for pure ALOHA protocol
h
Assume that the stations send fixed-length frames with each frame taking Tfr to send.
es
Figure above shows the vulnerable time for station A. Station A sends a frame at time t.
Now imagine station B has already sent a frame between t - Tfr and t. This leads to a
h
collision between the frames from station A and station B.
at
Vulnerable time in pure ALOHA is 2 times the frame transmission time.
ud
gh
Problem2: A pure ALOHA network transmits 200-bit frames on a shared channel of 200
kbps. What is the requirement to make this frame collision-free?
Ra
Solution:
Average frame transmission time Tfr = Frame length/ transmission speed
= 200 bits / 200 kbps = 1 ms
The vulnerable time is = 2 x Tfr
= 2 × 1 ms = 2 ms
This means no station should send later than 1ms before this station starts transmission
and no station should start sending during the 1ms period that station is sending.
Dept. of ECE raghudathesh.weebly.com Page No - 8
CCN 15ES64 Module 2 Lata S H Asst. Professor
Throughput:
The number of packets successfully transmitted through the channel per packet time
called throughput of Pure ALOHA.
Let us call G the average number of frames generated by the system during one frame
transmission time. Then it can be proved that the average number of successful
transmissions for pure ALOHA is S = G x e-2G.
The maximum throughput Smax is 0.184, for G = 1/2. i.e., if one-half a frame is generated
P
during one frame transmission time (in other words, one frame during two frame
transmission times), then 18.4 percent of these frames reach their destination
G
successfully.
Relation between G and S:
h
h es
at
ud
Problem3: A pure ALOHA network transmits 200-bit frames on a shared channel of 200
gh
kbps. What is the throughput if the system (all stations together) produces?
a. 1000 frames per second
b. 500 frames per second
Ra
c. 250 frames per second.
Solution:
The frame transmission time Tp = Frame length/ transmission speed
= 200/200 kbps or 1 ms.
a. If the system creates 1000 frames per second, this is 1 frame per millisecond.
The load is 1. i.e. G = 1
In this case S = G × e-2G or S = 0.135 (13.5 percent).
This means that the throughput is 1000 × 0.135 = 135 frames.
Dept. of ECE raghudathesh.weebly.com Page No - 9
CCN 15ES64 Module 2 Lata S H Asst. Professor
Only 135 frames out of 1000 will probably survive
b. If the system creates 500 frames per second, this is (1/2) frame per millisecond.
The load is (1/2). i,e G= ½
In this case S = G × e−2G or S = 0.184 (18.4 percent).
This means that the throughput is 500 × 0.184 = 92
Only 92 frames out of 500 will probably survive.
Note that this is the maximum throughput case, percentagewise.
c. If the system creates 250 frames per second, this is (1/4) frame per millisecond.
P
The load is (1/4). In this case S = G × e−2G or S = 0.152 (15.2 percent).
This means that the throughput is 250 × 0.152 = 38.
G
Only 38 frames out of 250 will probably survive
h
Slotted ALOHA:
es
Slotted ALOHA was invented to improve the efficiency of pure ALOHA.
Time is divided into discrete time intervals (slot). A station can transmit only at the
h
beginning of slot only.
at
Vulnerable time for slotted ALOHA is one-half that of pure ALOHA.
Slotted ALOHA vulnerable time = Tfr
ud
Figure below shows the frames in a slotted ALOHA network
gh
Ra
Figure: Frames in a slotted ALOHA network
Dept. of ECE raghudathesh.weebly.com Page No - 10
CCN 15ES64 Module 2 Lata S H Asst. Professor
In slotted ALOHA we divide the time into slots of Tfr seconds and force the station to
send only at the beginning of the time slot.
Because a station is allowed to send only at the beginning of the synchronized time slot,
if a station misses this moment, it must wait until the beginning of the next time slot.
This means that the station which started at the beginning of this slot has already finished
sending its frame. There is still the possibility of collision if two stations try to send at the
beginning of the same time slot.
Here, the vulnerable time is now reduced to one-half, equal to T.
P
Figure below shows the situation.
G
h
h es
at
ud
Figure: Vulnerable time for slotted ALOHA protocol
gh
Throughput:
The throughput for slotted ALOHA is S = G × e−G
Ra
The maximum throughput Smax = 0.368 when G = 1.
Problem4: A slotted ALOHA network transmits 200-bit frames on a shared channel of
200kbps. What is the throughput if the system (all stations together) produces
a. 1000 frames per second
b. 500 frames per second
c. 250 frames per second
Dept. of ECE raghudathesh.weebly.com Page No - 11
CCN 15ES64 Module 2 Lata S H Asst. Professor
Solution:
a. The frame transmission time is 200/200 kbps or 1 ms.
If the system creates 1000 frames per second, this is 1 frame per millisecond.
The load is 1. i,e G=1
In this case S = G× e−G or S = 0.368 (36.8 percent).
This means that the throughput is 1000 × 0.0368 = 368 frames.
Only 386 frames out of 1000 will probably survive.
b. If the system creates 500 frames per second, this is (1/2) frame per millisecond.
P
The load is (1/2).i,e G=1/2
In this case S = G × e−G or S = 0.303 (30.3 percent).
G
This means that the throughput is 500 × 0.0303 = 151.
Only 151 frames out of 500 will probably survive.
h
c. If the system creates 250 frames per second, this is (1/4) frame per millisecond.
The load is (1/4). i,e G=1/4 es
In this case S = G × e−G or S = 0.195 (19.5 percent).
h
This means that the throughput is 250 × 0.195 = 49.
Only 49 frames out of 250 will probably survive.
at
ud
Carrier Sense Multiple Access (CSMA):
CSMA is based on the principle “sense before transmit" or "listen before talk.
To minimize the chance of collision and, therefore, increase the performance, the CSMA
gh
method was developed.
The chance of collision can be reduced if a station senses the medium before trying to use
Ra
it. CSMA can reduce the possibility of collision, but it cannot eliminate it.
The possibility of collision still exists because of propagation delay; when a station sends
a frame, it still takes time (although very short) for the first bit to reach every station and
for every station to sense it.
Figure below shows a Space/time model of the collision in CSMA
Dept. of ECE raghudathesh.weebly.com Page No - 12
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
G
Figure: Space/time model of the collision in CSMA
At time t1, station B senses the medium and finds it idle, so it sends a frame.
h
At time t2 (t2 > t1), station C senses the medium and finds it idle because, at this time, the
es
first bits from station B have not reached station C. Station C also sends a frame.
The two signals collide and both frames are destroyed.
h
at
Vulnerable Time in CSMA:
The vulnerable time for CSMA is the propagation time Tp. This is the time needed for a
ud
signal to propagate from one end of the medium to the other.
When a station sends a frame, and any other station tries to send a frame during this time,
gh
a collision will result.
But if the first bit of the frame reaches the end of the medium, every station will already
Ra
have heard the bit and will refrain from sending.
Figure below shows the worst case Vulnerable time in CSMA
Dept. of ECE raghudathesh.weebly.com Page No - 13
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
Figure: Vulnerable time in CSMA
G
The leftmost station, A, sends a frame at time t1, which reaches the rightmost station, D,
at time t1 + Tp. The gray area shows the vulnerable area in time and space.
h
The vulnerable time for CSMA is the propagation time Tp.
Persistence Methods:
h es
To decide what a station can do when the channel is busy or idle three methods have been
at
devised:
1. 1-persistent
ud
2. Non-persistent method
3. P-persistent method.
gh
1. 1-Persistent CSMA:
Procedure for this algorithm are as follows
Ra
Sense the channel.
If busy, keep listening to the channel and transmit immediately when the channel
becomes idle.
If idle, transmit a packet immediately. If collision occurs.
Wait a random amount of time and start over again.
The protocol is called 1-persistent because the host transmits with a probability of
1 whenever it finds the channel idle.
Dept. of ECE raghudathesh.weebly.com Page No - 14
CCN 15ES64 Module 2 Lata S H Asst. Professor
Figure below shows the behavior of 1-persistence method when a station finds a
channel busy
P
Figure: 1-persistent
Figure below shows the flow diagram for 1-persistence method
G
h
h es
at
ud
Figure: 1-persistent
Non-Persistent CSMA:
gh
Procedure for this algorithm are as follows
Sense the channel.
Ra
If busy, wait a random amount of time and sense the channel again.
If idle, transmit a packet immediately.
If collision occurs, wait a random amount of time and start all over again.
Figure below shows the behavior of non-persistence method when a station finds
a channel busy
Dept. of ECE raghudathesh.weebly.com Page No - 15
CCN 15ES64 Module 2 Lata S H Asst. Professor
Figure: Non-persistent
Figure below shows the flow diagram for Non-persistence method
P
G
h
h es
at
Figure: Non-persistent
ud
P-persistent CSMA:
Procedure for this algorithm is as follows
gh
It is used if the channel has time slots with slot duration equal to or greater than
the maximum propagation time.
The p-persistent approach combines the advantages of the other two strategies. It
Ra
reduces the chance of collision and improves efficiency.
In this method, after the station finds the line idle it follows these steps:
1. With probability p, the station sends its frame.
2. With probability q = 1 - p, the station waits for the beginning of the next
time slot and checks the line again.
If the line is idle, it goes to step 1.
Dept. of ECE raghudathesh.weebly.com Page No - 16
CCN 15ES64 Module 2 Lata S H Asst. Professor
If the line is busy, it acts as though a collision has occurred and uses the back-off
procedure.
Figure below shows the behavior of p-persistence method when a station finds a
channel busy
P
G
Figure: p-persistent
h
Figure below shows the flow diagram for Non-persistence method
h es
at
ud
gh
Figure: p-persistent
Ra
Carrier Sense Multiple Access with Collision Detection (CSMA/CD):
The CSMA method does not specify the procedure following a collision.
Carrier senses multiple access with collision detection (CSMA/CD) augments the
algorithm to handle the collision.
CSMA/CD is used to improve CSMA performance by terminating transmission as soon
as a collision is detected.
Dept. of ECE raghudathesh.weebly.com Page No - 17
CCN 15ES64 Module 2 Lata S H Asst. Professor
Scenario: Consider the figure below, first bits transmitted by the two stations involved in
the collision. Although each station continues to send bits in the frame until it detects the
collision.
P
G
h
Figure: Collision of the first bit in CSMA/CD
es
At time t1, station A has executed its persistence procedure and starts sending the bits of
its frame.
h
At time t2, station C has not yet sensed the first bit sent by A.
at
Station C executes its persistence procedure and starts sending the bits in its frame, which
ud
propagate both to the left and to the right.
The collision occurs sometime after time t2, Station C detects a collision at time t3 when it
receives the first bit of A's frame. Station C immediately aborts transmission.
gh
Station A detects collision at time t4 when it receives the first bit of C's frame; it also
immediately aborts transmission.
Ra
We conclude that A transmits for the duration t4 – t1; C transmits for the duration t3 - t2.
Minimum Frame Size:
For CSMA/CD to work, It restriction on the frame size. Before sending the last bit of the
frame, the sending station must detect a collision, if any, and abort the transmission.
This is so because the station, once the entire frame is sent, does not keep a copy of the
frame and does not monitor the line for collision detection. Therefore,
Dept. of ECE raghudathesh.weebly.com Page No - 18
CCN 15ES64 Module 2 Lata S H Asst. Professor
Frame transmission time Tfr must be at least two times the maximum propagation time
Tp. i, e Tfr = 2Tp
The vulnerable time for CSMA/CD is twice the propagation time = 2Tp
Problem5: A network using CSMA/CD has a bandwidth of 10 Mbps. If the maximum
propagation time (including the delays in the devices and ignoring the time needed to send
a jamming signal,) is 25.6 μs, what is the minimum size of the frame?
P
Solution:
The frame transmission time is Tfr = 2 × Tp = 51.2 μs.
In the worst case, a station needs to transmit for a period of 51.2 μs to detect the collision.
G
The minimum size of the frame is 10 Mbps × 51.2 μs = 512 bits or 64 bytes.
This is actually the minimum size of the frame for Standard Ethernet.
h
Procedure for CSMA/CD:
es
Algorithmic steps for CSMA/CD as shown in figure below
h
at
ud
gh
Ra
Figure: Flow diagrams for the CSMA/CD
Dept. of ECE raghudathesh.weebly.com Page No - 19
CCN 15ES64 Module 2 Lata S H Asst. Professor
Energy Level:
Level of energy in a channel can have three values:
1. Zero: At this level, the channel is idle
2. Normal: At this level, a station has successfully captured the channel and is
sending its frame
3. Abnormal: At this level, there is a collision and the level of the energy is twice
the normal level
P
A station that has a frame to send or is sending a frame needs to monitor the energy level
to determine if the channel is idle, busy, or in collision mode. Figure below shows the
G
situation.
h
h es
at
Figure: Energy level during transmission, idleness, or collision
ud
Throughput of CSMA/CD:
gh
The throughput of CSMA/CD is greater than that of pure or slotted ALOHA.
The maximum throughput occurs at a different value of G and is based on the persistence
method and the value of p in the p-persistent approach.
Ra
For 1-persistent method the maximum throughput is around 50 percent when G =1.
For non persistent method, the maximum throughput can go up to 90 percent when G is
between 3 and 8.
Dept. of ECE raghudathesh.weebly.com Page No - 20
CCN 15ES64 Module 2 Lata S H Asst. Professor
Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA):
Carrier sense multiple access with collision avoidance (CSMA/CA) was invented for
wireless networks.
The basic idea behind CSMA/CD is that a station needs to be able to receive while
transmitting to detect a collision.
When there is no collision, the station receives one signal: its own signal. When there is a
collision, the station receives two signals: its own signal and the signal transmitted by a
P
second station.
To distinguish between these two cases, the received signals in these two cases must be
G
significantly different. The signal from the second station needs to add a significant
amount of energy to the one created by the first station.
In a wired network, the received signal has almost the same energy as the sent signal
h
because either the length of the cable is short or there are repeaters that amplify the
energy almost doubles.
h es
energy between the sender and the receiver. This means that in a collision, the detected
In a wireless network, much of the sent energy is lost in transmission. The received signal
at
has very little energy. Therefore, a collision may add only 5 to 10 percent additional
energy. This is not useful for effective collision detection.CA is used to improve CSMA
ud
performance by not allowing wireless transmission of a node if another node is
transmitting, thus reducing the probability of collision due to the use of a random time.
gh
Collisions are avoided through the use of CSMA/CA's three strategies:
1. The inter frame space (IFS)
2. The contention window
Ra
3. Acknowledgments
The figure below shows the CSMA/CA Mechanism
Dept. of ECE raghudathesh.weebly.com Page No - 21
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
G
h
h es
at
ud
gh
Ra
Figure: Flow diagram of CSMA/CA
1. Inter frame Space (IFS):
Collisions are avoided by deferring transmission even if the channel is found idle.
When an idle channel is found, the station does not send immediately.
It waits for a period of time called the inter-frame space or IFS.
Dept. of ECE raghudathesh.weebly.com Page No - 22
CCN 15ES64 Module 2 Lata S H Asst. Professor
Even though the channel may appear idle when it is sensed, a distant station may have
already started transmitting.
The distant station's signal has not yet reached this station. The IFS time allows the front
of the transmitted signal by the distant station to reach this station.
If after the IFS time the channel is still idle, the station can send, but it still needs to wait
a time equal to the contention time.
The IFS variable can also be used to prioritize stations or frame types. for example, a
station that is assigned shorter IFS has a higher priority.
P
G
2. Contention Window:
The contention window is an amount of time divided into slots.
h
A station that is ready to send chooses a random number of slots as its wait time.
The number of slots in the window changes according to the binary exponential back- off
strategy.
es
This means that it is set to one slot the first time and then doubles each time the station
h
cannot detect an idle channel after the IFS time.
at
Contention window is that the station needs to sense the channel after each time slot.
If the station finds the channel busy, it does not restart the process; it just stops the timer
ud
and restarts it when the channel is sensed as idle. This gives priority to the station with
the longest waiting time.
gh
Figure below illustrates the mechanism of contention window
Ra
Figure: Contention window
Dept. of ECE raghudathesh.weebly.com Page No - 23
CCN 15ES64 Module 2 Lata S H Asst. Professor
3. Acknowledgment:
With all these precautions, there still may be a collision resulting in destroyed data.
The positive acknowledgment and the time-out timer can help guarantee that the receiver
has received the frame.
Frame Exchange Time Line:
Figure below shows the exchange of data and control frames in time.
P
G
h
h es
at
ud
Figure: CSMA/CA and NAV
1. Before sending a frame, the source station senses the medium by checking theenergy
gh
level at the carrier frequency.
a. The channel uses a persistence strategy with backoff until the channel is idle.
Ra
b. After the station is found to be idle, the station waits for a period of time called
the DCF interframe space (DIFS); then the station sends a control frame called the
request to send (RTS).
2. After receiving the RTS and waiting a period of time called the short interframe space
(SIFS), the destination station sends a control frame, called the clear to send (CTS), to the
source station. This control frame indicates that the destination station is ready to receive
data.
3. The source station sends data after waiting an amount of time equal to SIFS.
Dept. of ECE raghudathesh.weebly.com Page No - 24
CCN 15ES64 Module 2 Lata S H Asst. Professor
4. The destination station, after waiting an amount of time equal to SIFS, sends an
acknowledgment to show that the frame has been received. Acknowledgment is needed
in this protocol because the station does not have any means to check for the successful
arrival of its data at the destination. On the other hand, the lack of collision in CSMA/CD
is a kind of indication to the source that data have arrived.
Network Allocation Vector:
P
When a station sends an RTS frame, it includes the duration of time that it needs to
occupy the channel.
G
The stations that are affected by this transmission create a timer called a network
allocation vector (NAV) that shows how much time must pass before these stations are
allowed to check the channel for idleness.
h
Each time a station accesses the system and sends an RTS frame, other stations start their
es
NAV. In other words, each station, before sensing the physical medium to see if it is idle,
first checks its NAV to see if it has expired.
h
at
Collision During Handshaking:
Two or more stations may try to send RTS frames at the same time.
ud
These control frames may collide. However, because there is no mechanism for collision
detection, the sender assumes there has been a collision if it has not received a CTS frame
gh
from the receiver.
The backoff strategy is employed, and the sender tries again.
Ra
Controlled Access:
Here, every station consults one another to find which station has the right to send.
A station cannot send unless it has been authorized by other stations.
There are three popular controlled-access methods
1. Reservation
2. Polling
3. Token Passing
Dept. of ECE raghudathesh.weebly.com Page No - 25
CCN 15ES64 Module 2 Lata S H Asst. Professor
1. Reservation:
In this method, a station needs to make a reservation before sending data.
Time is divided into intervals. In each interval, a reservation frame precedes the data
frames sent in that interval which is shown in figure below
P
G
Figure: Reservation access methods
If there are N stations in the system, there are exactly N reservation minislots in the
h
reservation frame. Each minislot belongs to a station.
es
When a station needs to send a data frame, it makes a reservation in its own minislots.
The stations that have made reservations can send their data frames after the
h
reservation frame.
at
2. Polling:
ud
The poll function is used by the primary device to solicit transmissions from the
secondary devices.
When the primary is ready to receive data, it must ask (poll) each device in turn if it
gh
has anything to send.
When the first secondary is approached, it responds either with a NAK frame if it has
Ra
nothing to send or with data (in the form of a data frame) if it does.
If the response is negative (a NAK frame), then the primary polls the next secondary
in the same manner until it finds one with data to send.
When the response is positive (a data frame), the primary reads the frame and returns
an acknowledgment (ACK frame), verifying its receipt.
Dept. of ECE raghudathesh.weebly.com Page No - 26
CCN 15ES64 Module 2 Lata S H Asst. Professor
Figure: Select and poll functions in polling access method
P
Token Passing:
G
In this method, the stations in a network are organized in a logical ring where for each
station, there is a predecessor and a successor.
In this method, a special packet called a token circulates through the ring. The
h
possession of the token gives the station the right to access the channel and send its
data.
es
When a station has some data to send, it waits until it receives the token from its
h
predecessor. It then holds the token and sends its data.
at
When the station has no more data to send, it releases the token, passing it to the next
logical station in the ring.
ud
The station cannot send data until it receives the token again in the next round.
Token management:
gh
It is needed for this access method. Stations must be limited in the time they
can have possession of the token.
The token must be monitored to ensure it has not been lost or destroyed.
Ra
Ex.: If a station that is holding the token fails, the token will disappear from
the network.
Another function of token management is to assign priorities to the stations
and to the types of data being transmitted.
Token management is needed to make low-priority stations release the token
to high-priority stations.
Dept. of ECE raghudathesh.weebly.com Page No - 27
CCN 15ES64 Module 2 Lata S H Asst. Professor
Logical Ring:
In a token-passing network, stations do not have to be physically connected in a ring;
the ring can be a logical one.
1. Physical Ring Topology:
When a station sends the token to its successor, the token cannot be seen by other
stations; the successor is the next one in line i.e., the token does not have to have the
P
address of the next successor.
Drawback: if one of the links in the medium between two adjacent stations fails, the
G
whole system fails.
h
h es
Figure: Physical Ring
at
2. Dual Ring Topology:
ud
The dual ring topology uses a second/auxiliary ring which operates in the reverse
direction compared with the main ring.
gh
The second ring is for emergencies only. If one of the links in the main ring fails, the
system automatically combines the two rings to form a temporary ring. After the
failed link is restored, the auxiliary ring becomes idle again.
Ra
Here each station needs to have two transmitter ports and two receiver ports.
Figure: Dual Ring
Dept. of ECE raghudathesh.weebly.com Page No - 28
CCN 15ES64 Module 2 Lata S H Asst. Professor
3. Bus Ring Topology:
This topology also called a token bus, the stations are connected to a single cable
called a bus.
They, make a logical ring, because each station knows the address of its successor
and also predecessor for token management purposes.
When a station has finished sending its data, it releases the token and inserts the
address of its successor in the token.
Only the station with the address matching the destination address of the token gets
P
the token to access the shared media. The Token Bus LAN, standardized by IEEE,
uses this topology.
G
h
h es
Figure: Bus Ring
at
4. Star Ring Topology:
ud
Here the physical topology is a star.
There is a hub, however, that acts as the connector. The wiring inside the hub makes the ring; the
gh
stations are connected to this ring through the two wire connections.
This topology makes the network less prone to failure because if a link goes down, it will be
bypassed by the hub and the rest of the stations can operate. Also adding and removing stations
Ra
from the ring is easier.
Figure: Star Ring
Dept. of ECE raghudathesh.weebly.com Page No - 29
CCN 15ES64 Module 2 Lata S H Asst. Professor
Wired LANs: Ethernet
Introduction:
A local area network (LAN) is a computer network that is designed for a limited
geographic area such as a building or a campus. Although a LAN can be used as an
isolated network to connect computers in an organization for the sole purpose of sharing
resources, most LANs today are also linked to a wide area network (WAN) or the
P
Internet.
In 1985, the Computer Society of the IEEE started a project, called Project 802, to set
G
standards to enable intercommunication among equipment from a variety of
manufacturers.
h
Project 802 is a way of specifying functions of the physical layer and the data link layer
of major LAN protocols.
es
ISO approved 802 under the designation ISO8802 and is adopted by American National
Standards Institute (ANSI) in 1987.
h
The relationship of the 802 Standard to the traditional OSI model is shown in Figure
at
below
ud
gh
Ra
Figure: IEEE standard for LANs
Dept. of ECE raghudathesh.weebly.com Page No - 30
CCN 15ES64 Module 2 Lata S H Asst. Professor
The IEEE has subdivided the data link layer into two sub layers:
Logical Link Control (LLC)
Media Access Control (MAC)
IEEE has also created several physical layer standards for different LAN protocols.
Logical Link Control (LLC):
Data link layer handles framing, flow control, and error control.
But in IEEE Project 802, flow control, error control, and part of the framing duties are
P
collected into one sublayer called the logical link control.
Framing is handled in both the LLC sublayer and the MAC sublayer.
G
The LLC provides one single data link control protocol for all IEEE LANs.
A single LLC protocol can provide interconnectivity between different LANs because
h
it makes the MAC sublayer transparent.
The Figure above shows one single LLC protocol serving several MAC protocols.
HDLC.
h es
Framing LLC defines a protocol data unit (PDU) that is somewhat similar to that of
The header contains a control field like the one in HDLC; this field is used for flow
at
and error control.
The two other header fields define the upper-layer protocol at the source and
ud
destination that uses LLC. These fields are called the destinationservice access point
(DSAP) and the source service access point (SSAP).
gh
The other fields defined in a typical data link control protocol such as HDLC are
moved to the
MAC sublayer.
Ra
Hence, a frame defined in HDLC is divided into a PDU at the LLC sublayer and a
frame at the MAC sublayer, as shown in Figure below.
Dept. of ECE raghudathesh.weebly.com Page No - 31
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
Figure: HDLC frame compared with LLC and MAC frames
Need of LLC:
G
To provide flow and error control for the upper-layer protocols that actually demand
these services.
h
Ex. if a LAN or several LANs are used in an isolated system, LLC may be needed to
Media Access Control (MAC):
es
provide flow and error control for the application layer protocols.
IEEE Project 802 has created a sublayer called media access control that defines the
h
specific access method for each LAN.
at
Ex: CSMA/CD as the media access method for Ethernet LANs and the token passing
method for Token Ring and Token Bus LANs.
ud
Physical Layer:
The physical layer is dependent on the implementation and type of physical media
gh
used.
IEEE defines detailed specifications for each LAN implementation.
Ex: although there is only one MAC sublayer for Standard Ethernet, there is a
Ra
different physical layer specifications for each Ethernet implementation.
Standard Ethernet:
The original Ethernet was created in 1976 at Xerox's Palo Alto Research Center (PARC).
Since then, it has gone through four generations:
1. Standard Ethernet (lot Mbps)
2. Fast Ethernet (100 Mbps)
Dept. of ECE raghudathesh.weebly.com Page No - 32
CCN 15ES64 Module 2 Lata S H Asst. Professor
3. Gigabit Ethernet (l Gbps)
4. Ten-Gigabit Ethernet (l0 Gbps)
In all the above Ethernet we have to concentrate on MAC layer and Physical layer.
The Figure below shows the four generations of ethernet.
P
G
Figure 13.3 Ethernet evolution through four generations
h
MAC Sublayer
Performs two main functions:
es
Governs the operation of the access method.
h
Frames data received from the upper layer and passes them to the physical layer.
at
Frame Format:
The Ethernet frame contains seven fields.
ud
Ethernet does not provide any mechanism for acknowledging received frames,
making it what is known as an unreliable medium. Acknowledgments must be
gh
implemented at the higher layers.
The format of the MAC frame is shown in Figure below:
Ra
Figure: 802.3 MAC frame
Dept. of ECE raghudathesh.weebly.com Page No - 33
CCN 15ES64 Module 2 Lata S H Asst. Professor
Descriptions of MAC frame fields:
1. Preamble:
Contains 7 bytes of alternating 0s and 1s.
Alerts the receiving system to the coming frame and enables it to synchronize its
input timing. The pattern provides only an alert and a timing pulse.
The 56-bit pattern allows the stations to miss some bits at the beginning of the frame.
The preamble is actually added at the physical layer and is not part of the frame.
P
2. Start frame delimiter (SFD):
G
The second field (l byte: 10101011) signals the beginning of the frame.
It warns the station or stations that this is the last chance for synchronization.
h
The last 2 bits (11) alerts the receiver that the next field is the destination address.
3. Destination Address (DA):
h es
The DA field is 6 bytes.
Contains the physical address of the destination station or stations to receive the
at
packet.
ud
gh
4. Source Address (SA):
Ra
The SA field is also 6 bytes.
Contains the physical address of the sender of the packet.
5. Length or type:
The original Ethernet used this field as the type field to define the upper-layer
protocol using the MAC frame.
The IEEE standard used it as the length field to define the number of bytes in the data
field.
Dept. of ECE raghudathesh.weebly.com Page No - 34
CCN 15ES64 Module 2 Lata S H Asst. Professor
6. Data:
This field carries data encapsulated from the upper-layer protocols.
It is a minimum of 46 and a maximum of 1500 bytes.
7. CRC:
The last field contains error detection information, in this case a CRC-32.
Frame Length:
P
Ethernet has imposed restrictions on both the minimum and maximum lengths of a frame
G
as shown below.
h
h es
at
Figure: Minimum and maximum lengths
ud
The minimum length required for the correct operation of the CSMA/CD is 512 bits or 64
bytes.
gh
The minimum length of data from the upper layer is 64 - 18 = 46 bytes. If the upper-layer
packet is less than 46 bytes, padding is added to make up the difference.
Ra
The standard defines the maximum length of a frame (without preamble and SFD field)
as 1518 bytes. If we subtract the 18 bytes of header and trailer, the maximum length of
the payload is 1500 bytes.
The maximum length restriction has two historical reasons:
Memory was very expensive when Ethernet was designed: a maximum length
restriction helped to reduce the size of the buffer.
The maximum length restriction prevents one station from monopolizing the shared
medium, blocking other stations that have data to send.
Dept. of ECE raghudathesh.weebly.com Page No - 35
CCN 15ES64 Module 2 Lata S H Asst. Professor
Addressing:
Each station on an Ethernet network has its own network interface card (NIC) and has 6
byte physical address as shown below
P
Figure: 6 Byte NIC Address
G
There are three types address:
Unicast Addresses
h
Multicast Addresses
Broadcast Addresses es
A source address is always a unicast address as the frame comes from only one station.
h
The destination address, however, can be unicast, multicast, or broadcast.
at
The figure below shows how to distinguish a unicast address from a multicast address.
ud
gh
Ra
If the least significant bit of the first byte in a destination address is 0, the address is
unicast; otherwise, it is multicast.
A unicast destination address defines only one recipient; the relationship between the
sender and the receiver is one-to-one.
A multicast destination address defines a group of addresses; the relationship between the
sender and the receivers is one-to-many.
The broadcast address is a special case of the multicast address; the recipients are all the
stations on the LAN. A broadcast destination address is forty-eight 1’ s.
Dept. of ECE raghudathesh.weebly.com Page No - 36
CCN 15ES64 Module 2 Lata S H Asst. Professor
Problems:
1. Define the type of the following destination addresses:
a. 4A:30:10:21:1O:1A
b. 47:20:1B:2E:08:EE
c. FF:FF:FF:FF:FF:FF
Solution
To find the type of the address, we need to look at the second hexadecimal digit from the left.
P
If it is even, the address is unicast.
If it is odd, the address is multicast.
G
If all digits are F's, the address is broadcast.
Therefore, we have the following:
h
a. This is a unicast address because A in binary is 1010 (even).
es
b. This is a multicast address because 7 in binary is 0111 (odd).
c. This is a broadcast address because all digits are F's.
h
The way the addresses are sent out on line is different from the way they are written in
hexadecimal notation.
at
The transmission is left-to-right, byte by byte; however, for each byte, the least significant bit is
ud
sent first and the most significant bit is sent last.
This means that the bit that defines an address as unicast or multicast arrives first at the receiver.
gh
2. Show how the address 47:20:1B:2E:08:EE is sent out on line.
Solution
Ra
The address is sent left-to-right, byte by byte; for each byte, it is sent right-to-Ieft, bit by bit, as
shown below:
11100010 00000100 11011000 01110100 00010000 01110111
Dept. of ECE raghudathesh.weebly.com Page No - 37
CCN 15ES64 Module 2 Lata S H Asst. Professor
Slot Time:
The slot time in Ethernet is defined in terms of bits.
It is the time required for a station to send 512 bits.
Definition: The round-trip time required for a frame to travel from one end of a
maximum-length network to the other plus the time needed to send the jam sequence is
called the slot time.
P
Slot time =round-trip time + time required to send the jam sequence
G
This means that the actual slot time depends on the data rate; for traditional 10-Mbps
Ethernet it is 51.2 µs.
h
Maximum Network Length:
es
Depends on the propagation speed of the signal in the particular medium.
In most transmission media, the signal propagates at 2 x 108 mps (two-thirds of the rate
h
for propagation in air).
at
For traditional Ethernet,
ud
gh
( )
Ra
Practically, we need to consider the delay times in repeaters and interfaces, and the time
required to send the jam sequence.
These reduce the maximum-length of a traditional Ethernet network to 2500 m, just 48
percent of the theoretical calculation.
Dept. of ECE raghudathesh.weebly.com Page No - 38
CCN 15ES64 Module 2 Lata S H Asst. Professor
Physical Layer:
The Standard Ethernet defines several physical layer implementations; four of the most
common, are shown in Figure below.
P
G
h
h es
Figure: Categories of Standard Ethernet
Encoding and Decoding:
at
All standard implementations use digital signaling (baseband) at 10 Mbps.
At the sender, data are converted to a digital signal using the Manchester scheme; at the
ud
receiver, the received signal is interpreted as Manchester and decoded into data.
gh
Ra
Dept. of ECE raghudathesh.weebly.com Page No - 39
CCN 15ES64 Module 2 Lata S H Asst. Professor
Figure: Encoding in a Standard Ethernet implementation
Categories of Standard Ethernet:
P
10Base5:
The first implementation is called 10Base5.
G
Alternate names: thick Ethernet, or Thicknet.
The cable too stiff to bend with hands.
h
10Base5 was the first Ethernet specification to use a bus topology with an external
es
transceiver (transmitter/receiver) connected via a tap to a thick coaxial cable.
Transceiver is responsible for transmitting receiving and detecting collisions.
h
maximum length of the cable is 500 meters, otherwise, there is excessive degradation of
at
the signal.
If a length of more than 500 m is needed, up to five segments, each a maximum of 500-
ud
meter, can be connected using repeaters.
Figure below shows a schematic diagram of a 10Base5 implementation.
gh
Ra
Figure: 10Base5 implementation
Dept. of ECE raghudathesh.weebly.com Page No - 40
CCN 15ES64 Module 2 Lata S H Asst. Professor
10Base2:
The second implementation is called 10Base2.
Also called as thin Ethernet, or Cheapernet.
10Base2 uses a bus topology.
The cable is much thinner and more flexible.
The cable can be bent to pass very close to the stations.
The transceiver is normally part of the network interface card (NIC), which is installed
P
inside the station.
Figure below shows the schematic diagram of a 10Base2 implementation.
G
h
h es
at
Figure: 10Base2 implementation
ud
The collision here occurs in the thin coaxial cable.
This implementation is more cost effective than 10Base5 because thin coaxial cable is
gh
less expensive than thick coaxial and the tee connections are much cheaper than taps.
Installation is simpler because the thin coaxial cable is very flexible.
Ra
The length of each segment cannot exceed 185 m (close to 200 m) due to the high level
of attenuation in thin coaxial cable.
10Base-T:
The third implementation is called 10Base-T or twisted-pair Ethernet.
10Base-T uses a physical star topology.
The stations are connected to a hub via two pairs of twisted cable.
Any collision here happens in the hub.
Dept. of ECE raghudathesh.weebly.com Page No - 41
CCN 15ES64 Module 2 Lata S H Asst. Professor
The maximum length of the twisted cable here is defined as 100 m, to minimize the effect
of attenuation in the twisted cable.
Figure below shows the schematic diagram of a 10Base-T implementation.
P
G
h
Figure: 10Base-T implementation
10Base-F:
Belongs to the class of optical fiber
h es
Also called as Fiber Ethernet uses a optical fiber 10-Mbps Ethernet, the most common is
at
called 10Base-F.
Uses star topology.
ud
Stations are connected to a hub via two pairs of twisted cable.
Two pairs of twisted cable create two fiber optic cables.
gh
Collisions occur in the hub.
Maximum length of the cable is 2000 meter.
Ra
Figure below shows the schematic diagram of a 10Base-F implementation.
Figure: 10Base-F implementation
Dept. of ECE raghudathesh.weebly.com Page No - 42
CCN 15ES64 Module 2 Lata S H Asst. Professor
Comparison:
P
G
Changes in the Standard:
The 10-Mbps Standard Ethernet has gone through several changes before moving to the
h
higher data rates.
Types of changes include:
1. Bridged Ethernet
h es
2. Switched Ethernet
at
3. Full-Duplex Ethernet
ud
Bridged Ethernet:
It performs the division of a LAN using bridges.
gh
Bridges have two effects on an Ethernet LAN:
1. Rise in the bandwidth
2. The separation of collision domains
Ra
Raising the Bandwidth:
In an unbridged Ethernet network, the total capacity say 10 Mbps is shared among all
stations with a frame to send; the stations share the bandwidth of the network.
If only one station has frames to send it benefits from the total bandwidth. If more than
one station use the network then the capacity is shared.
Dept. of ECE raghudathesh.weebly.com Page No - 43
CCN 15ES64 Module 2 Lata S H Asst. Professor
Ex., if two stations have a lot of frames to send, they probably alternate in usage. When
one station is sending, the other one refrains from sending. Thus here, each station on
average sends at a rate of 5 Mbps.
Figure below shows a typical scenario
P
G
h
Figure: Sharing bandwidth
es
A bridge divides the network into two or more networks where each network is
h
independent.
at
Figure below shows a network with 12 stations is divided into two networks, each with 6
stations. Now each network has a capacity of 10 Mbps.
ud
In a network with a heavy load, each station theoretically is offered 10/6 Mbps instead of
10/12 Mbps, assuming that the traffic is not going through the bridge.
gh
Ra
Figure: A network with and without a bridge
Dept. of ECE raghudathesh.weebly.com Page No - 44
CCN 15ES64 Module 2 Lata S H Asst. Professor
Separating Collision Domains:
A bridge separates the collision domain.
Figure below shows the collision domains for an unbridged and a bridged network.
Bridge makes the collision domain much smaller and the probability of collision is
reduced to a greater extent.
In the figure below without bridging, 12 stations contend for access to the medium; with
bridging only 3 stations contend for access to the medium.
P
G
h
h es
at
Figure: Collision domains in an unbridged network and a bridged network
ud
Switched Ethernet:
gh
Instead of having two to four networks, we can have N networks, where N is the number
of stations on the LAN.
Ra
If we can have a multiple-port bridge, we can have an N-port switch. Thus, the bandwidth
is shared only between the station and the switch (5 Mbps each if total bandwidth is
10Mbps).
The collision domain is divided into N domains.
Ex., A layer 2 switch is an N-port bridge with additional sophistication that allows faster
handling of the packets.
Figure below shows a switched LAN.
Dept. of ECE raghudathesh.weebly.com Page No - 45
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
Figure: Switched Ethernet
G
Full-Duplex Ethernet:
The limitations of 10Base5 and 10Base2 is that communication is half-duplex.
h
The full-duplex mode increases the capacity of each domain from 10 to 20 Mbps.
es
Figure below shows a switched Ethernet in full-duplex mode.
h
at
ud
gh
Ra
Figure: Full-duplex switched Ethernet
Fast Ethernet:
Fast Ethernet was designed to compete with LAN protocols such as FDDI or Fiber
Channel. IEEE standard for Fast Ethernet is 802.3u.
Fast Ethernet is backward-compatible with Standard Ethernet, but it can transmit data 10
times faster at a rate of 100 Mbps.
The goals of Fast Ethernet are:
1. Upgrade the data rate to 100 Mbps.
Dept. of ECE raghudathesh.weebly.com Page No - 46
CCN 15ES64 Module 2 Lata S H Asst. Professor
2. Make it compatible with Standard Ethernet.
3. Keep the same 48-bit address.
4. Keep the same frame format.
5. Keep the same minimum and maximum frame lengths.
MAC Sublayer:
In the evolution of Ethernet from 10 to 100 Mbps was to keep the MAC sublayer
P
untouched.
A decision was made to drop the bus topologies and keep only the star topology.
G
The access method is CSMA/CD for the half-duplex approach; for full duplex Fast
Ethernet, there is no need for CSMAlCD.
However, the implementations keep CSMA/CD for backward compatibility with
h
Standard Ethernet.
Autonegotiation:
h es
Autonegotiation allows a station or a hub with a range of capabilities.
at
Autonegotiation allows two devices to negotiate the mode or data rate of operation.
It was designed particularly for the following purposes:
ud
1. To allow incompatible devices to connect to one another.
Ex., a device with a maximum capacity of 10 Mbps can communicate with
gh
a device with a 100 Mbps capacity (but can work at a lower rate).
2. To allow one device to have multiple capabilities.
3. To allow a station to check a hub's capabilities.
Ra
Dept. of ECE raghudathesh.weebly.com Page No - 47
CCN 15ES64 Module 2 Lata S H Asst. Professor
Physical Layer:
The physical layer in Fast Ethernet is more complicated than in Standard Ethernet.
Topology:
Fast Ethernet is designed to connect two or more stations together.
If there are only two stations, they can be connected point-to-point. Three or more
stations need to be connected in a star topology with a hub or a switch at the center.
P
Figure below shows the topology of connection.
G
h
h es
Figure: Fast Ethernet topology
at
Implementation:
ud
Implementation at the physical layer can be categorized as
1. Two-wire: The two-wire implementation can be either category 5 UTP (100Base-
TX) or fiber-optic cable (100Base-FX).
gh
2. Four-wire: The four-wire implementation is designed only for category 3 UTP
(l00Base-T4). Figure below shows the different implementation methods.
Ra
Figure: Fast Ethernet implementations
Dept. of ECE raghudathesh.weebly.com Page No - 48
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
G
h
h es
at
ud
gh
Encoding:
Ra
Manchester encoding needs a 200-Mbaud bandwidth for a data rate of 100 Mbps, which
makes it unsuitable for a medium such as twisted-pair cable.
The Fast Ethernet designers sought some alternative encoding/decoding scheme.
Three different encoding schemes were chosen:
Dept. of ECE raghudathesh.weebly.com Page No - 49
CCN 15ES64 Module 2 Lata S H Asst. Professor
100Base-TX:
Uses two pairs of twisted-pair cable.
The MLT-3 scheme was selected since it has good bandwidth performance.
MLT-3 is not a self-synchronous line coding scheme, 4B/5B block coding is used to
provide bit synchronization by preventing the occurrence of a long sequence of 0’s and
1’s.
This creates a data rate of 125 Mbps, which is fed into MLT-3 for encoding.
P
G
h
h es
Figure: 100Base-TX
at
Multiline Transmission: MLT-3:
ud
Uses three levels (+V, 0 and -V) and three transition rules to move between the levels:
1. If the next bit 0, no transition.
gh
2. If the next bit is 1 and the current level is not 0, the next level is 0.
3. If the next bit 1 and the current level is 0, the next level is the positive of the last
nonzero level.
Ra
The signal rate for MLT-3 is one-fourth the bit rate.
MLT-3 when we need to send 100Mbps on a copper wire that cannot support more than
32MHz.
Figure below shows the state transition diagram:
Dept. of ECE raghudathesh.weebly.com Page No - 50
CCN 15ES64 Module 2 Lata S H Asst. Professor
P
Figure: Multiline Transmission
4B/5B Mapping Codes:
G
h
h es
at
ud
gh
Ra
100Base-FX:
Uses two pairs of fiber-optic cables (to handle higher bandwidth).
100Base-FX selects the NRZ-I encoding scheme for this implementation.
NRZ-I has a bit synchronization problem for long sequences of 0’s (or 1’s, based on the
encoding).
To overcome this problem, the designers used 4B/5B block encoding.
Dept. of ECE raghudathesh.weebly.com Page No - 51
CCN 15ES64 Module 2 Lata S H Asst. Professor
The block encoding increases the bit rate from 100 to 125 Mbps, which can easily be
handled by fiber-optic cable.
P
Figure: 100Base-FX
G
100Base-T4:
It was designed to use category 3 or higher UTP.
h
The implementation uses four pairs of UTP for transmitting 100 Mbps.
Encoding/decoding in 100Base-T4 is more complicated.
es
8B/6T encoding scheme is used to carry 100 Mbps.
h
at
ud
gh
Figure: 100Base-T4
Comparison between Different Fast Ethernet implementations:
Ra
Dept. of ECE raghudathesh.weebly.com Page No - 52
CCN 15ES64 Module 2 Lata S H Asst. Professor
Gigabit Ethernet:
The need for an even higher data rate resulted in the design of the Gigabit Ethernet
protocol (1000 Mbps).
The IEEE committee calls the Standard 802.3z.
The goals of the Gigabit Ethernet design can be summarized as follows:
1. Upgrade the data rate to 1 Gbps.
2. Make it compatible with Standard or Fast Ethernet.
P
3. Use the same 48-bit address.
4. Use the same frame format.
G
5. Keep the same minimum and maximum frame lengths.
6. To support autonegotiation as defined in Fast Ethernet.
h
MAC Sublayer:
es
Gigabit Ethernet has two distinctive approaches for medium access:
h
Full-duplex:
at
In this mode a central switch connected to all computers or other switches.
Each switch has buffers for each input port in which data are stored until they are
ud
transmitted. There is no collision in this mode.
The maximum length of the cable is determined by the signal attenuation in the cable, not
gh
by the
Collision detection process.
Ra
Half-duplex:
This mode of implementation is rare.
Here a switch can be replaced by a hub, which acts as the common cable in which a
collision might occur.
The half-duplex approach uses CSMA /CD.
The maximum length of the network in this approach is totally dependent on the
minimum frame size.
Dept. of ECE raghudathesh.weebly.com Page No - 53
CCN 15ES64 Module 2 Lata S H Asst. Professor
Three methods have been defined:
1. Traditional
2. Carrier Extension
3. Frame Bursting
1. Traditional:
Here the minimum length of the frame is 512 bits.
The slot time for Gigabit Ethernet is 0.512 µs.
P
The maximum length of the network is 25 m.
G
This length may be suitable if all the stations are in one room, but it may not even be
long enough to connect the computers in one single office.
h
2. Carrier Extension:
es
To allow for a longer network, this method increases the minimum frame length.
The carrier extension approach defines the minimum length of a frame as 512 bits and
h
can be extended to 4096 bits thus the minimum length is 8 times longer.
at
This method forces a station to add extension bits (padding) to any frame that is less
than 4096 bits.
ud
In this way, the maximum length of the network can be increased 8 times to a length
of 200 m. This allows a length of 100 m from the hub to the station.
gh
3. Frame Bursting:
Carrier extension is very inefficient if we have a series of short frames to send; each
Ra
frame carries redundant data.
To improve efficiency, frame bursting was proposed. Instead of adding an extension
to each frame, multiple frames are sent.
To make the multiple frames look like one frame, padding is added between the
frames so that the channel is not idle.
Dept. of ECE raghudathesh.weebly.com Page No - 54
CCN 15ES64 Module 2 Lata S H Asst. Professor
Physical Layer:
The physical layer in Gigabit Ethernet is more complicated than that in Standard or Fast
Ethernet.
Topology:
Gigabit Ethernet is designed to connect two or more stations.
If there are only two stations, they can be connected point-to-point.
Three or more stations need to be connected in a star topology with a hub or a switch at
P
the center.
G
Another possible configuration is to connect several star topologies or let a star topology
be part of another as shown in figure below
h
h es
at
ud
gh
Figure: Topologies of Gigabit Ethernet
Ra
Implementation:
Gigabit Ethernet can be categorized as
A two-wire implementation:
The two-wire implementations use fiber-optic cable (1000Base-SX, short-
wave, or 1000Base-LX, long-wave), or STP (1000Base-CX).
A four-wire implementation:
The four-wire version uses category 5 twisted-pair cable (1000Base-T).
Dept. of ECE raghudathesh.weebly.com Page No - 55
CCN 15ES64 Module 2 Lata S H Asst. Professor
Thus, we have four implementations as shown in Figure below.
P
G
Figure: Gigabit Ethernet implementations
Encoding:
h
The two-wire implementations use an NRZ scheme, but NRZ does not self-synchronize
properly. es
To synchronize bits, particularly at this high data rate, 8B/10B block encoding is used.
h
This block encoding prevents long sequences of 0’s or 1’s in the stream, but the resulting
at
stream is 1.25 Gbps.
In the four-wire implementation 4D-PAM5 encoding is used to reduce the bandwidth.
ud
All four wires are involved in both input and output; each wire carries 250 Mbps, which
is in the range for category 5 UTP cable.
gh
Ra
Figure: Encoding in Gigabit Ethernet implementations
Dept. of ECE raghudathesh.weebly.com Page No - 56
CCN 15ES64 Module 2 Lata S H Asst. Professor
Comparison between Different Gigabit Ethernet implementations:
P
G
Ten-Gigabit Ethernet:
The IEEE committee created Ten-Gigabit Ethernet and called it Standard 802.3ae.
h
The goals of the Ten-Gigabit Ethernet design includes:
es
1. Upgrade the data rate to 10 Gbps.
2. Make it compatible with Standard, Fast, and Gigabit Ethernet.
h
3. Use the same 48-bit address.
at
4. Use the same frame format.
5. Keep the same minimum and maximum frame lengths.
ud
6. Allow the interconnection of existing LANs into a metropolitan area network
(MAN) or a wide area network (WAN).
gh
7. Make Ethernet compatible with technologies such as Frame Relay and ATM.
MAC Sublayer:
Ra
Ten-Gigabit Ethernet operates only in full duplex mode which means there is no need for
contention.
CSMA/CD is not used in Ten-Gigabit Ethernet.
Physical Layer:
The physical layer in Ten-Gigabit Ethernet is designed for using fiber-optic cable over
long distances.
Three implementations are the most common:
Dept. of ECE raghudathesh.weebly.com Page No - 57
CCN 15ES64 Module 2 Lata S H Asst. Professor
1. lOGBase-S
2. lOGBase-L
3. lOGBase-E
Table below shows a summary of the Ten-Gigabit Ethernet implementation
P
G
h
h es
at
ud
gh
Ra
Dept. of ECE raghudathesh.weebly.com Page No - 58
CCN 15ES64 Module 2 Lata S H Asst. Professor
Question Bank
1. List three categories of multiple access protocols discussed in this chapter.
2. Define random access and list three protocols in this category.
3. Define controlled access and list three protocols in this category.
4. Define channelization and list three protocols in this category.
5. Explain why collision is an issue in a random access protocol but not in controlled access
or channelizing protocols.
P
6. Compare and contrast a random access protocol with a controlled access protocol.
7. Compare and contrast a random access protocol with a channelizing protocol.
G
8. Compare and contrast a controlled access protocol with a channelizing protocol.
9. Do we need a multiple access protocol when we use the 1ocalloop of the telephone
h
company to access the Internet? Why?
Internet? Why?
es
10. Do we need a multiple access protocol when we use one CATV channel to access the
11. We have a pure ALOHA network with 100 stations. If Tfr = 1, what is the number of
h
frames/s each station can send to achieve the maximum efficiency.
at
12. Repeat Exercise 11 for slotted ALOHA.
13. One hundred stations on a pure ALOHA network share a l-Mbps channel. If frames are
ud
1000 bits long, find the throughput if each station is sending 10 frames per second.
14. Repeat Exercise 13 for slotted ALOHA.
gh
15. In a CDMA/CD network with a data rate of 10 Mbps, the minimum frame size is found to
be 512 bits for the correct operation of the collision detection process. What should be the
Ra
minimum frame size if we increase the data rate to 100 Mbps? To 1 Gbps? To 10 Gbps?
16. In a CDMA/CD network with a data rate of 10 Mbps, the maximum distance between
any station pair is found to be 2500 m for the correct operation of the collision detection
process. What should be the maximum distance if we increase the data rate to 100 Mbps?
To 1 Gbps? To 10 Gbps?
17. In CSMA/CD, the data rate is 10 Mbps, the distance between station A and C is 2000 m,
and the propagation speed is 2 x 108 m/s. Station A starts sending a long frame at time t1
Dept. of ECE raghudathesh.weebly.com Page No - 59
CCN 15ES64 Module 2 Lata S H Asst. Professor
=0; station C starts sending a long frame at time t2 =3, if The size of the frame is long
enough to guarantee the detection of collision by both stations. Find:
a. The time when station C hears the collision (t3)
b. The time when station A hears the collision (t4)
c. The number of bits station A has sent before detecting the collision.
d. The number of bits station C has sent before detecting the collision.
18. Repeat Exercise 17 if the data rate is 100 Mbps.
P
G
h
h es
at
ud
gh
Ra
Dept. of ECE raghudathesh.weebly.com Page No - 60
You might also like
- How To - Fault Find On Can BusDocument13 pagesHow To - Fault Find On Can BusIvan PalominoNo ratings yet
- (2-2.b) - As-Built For Metal BuildingDocument482 pages(2-2.b) - As-Built For Metal BuildingAbdul Wadood GharsheenNo ratings yet
- Manual SKF TK Sa 40 PDFDocument432 pagesManual SKF TK Sa 40 PDFDouglas CarrascoNo ratings yet
- DBMS ProjectDocument26 pagesDBMS ProjectSagnik ChatterjeeNo ratings yet
- Data Communication and Networking Chapter - 3Document133 pagesData Communication and Networking Chapter - 3Pardeep Virvani50% (2)
- Flow Control at Transport LayerDocument4 pagesFlow Control at Transport LayergunapalshettyNo ratings yet
- Splunk Administration PDFDocument2 pagesSplunk Administration PDFAbdul RahimNo ratings yet
- Vtu 5th Sem Cse Computer NetworksDocument91 pagesVtu 5th Sem Cse Computer NetworksHidayathNo ratings yet
- CCN NOTS Final Unit - 3Document39 pagesCCN NOTS Final Unit - 3Bruce Randall100% (3)
- 1 Compare I-TCP, S-TCP and M-TCP 2 Understand CO3: Assignment # 2Document8 pages1 Compare I-TCP, S-TCP and M-TCP 2 Understand CO3: Assignment # 2wexidaNo ratings yet
- Flash Flood Intimation Over GSM NetworkDocument2 pagesFlash Flood Intimation Over GSM NetworkLikithaReddy YenumulaNo ratings yet
- Assignment 2Document5 pagesAssignment 2Jemosha JeNo ratings yet
- Telecom Business Information System AbstractDocument5 pagesTelecom Business Information System AbstractTelika RamuNo ratings yet
- Fig.1.14 Logical Connections Between Layers of The TCP/IP Protocol SuiteDocument34 pagesFig.1.14 Logical Connections Between Layers of The TCP/IP Protocol SuiteNadeem PashaNo ratings yet
- Railway OFC TrainingDocument17 pagesRailway OFC TrainingSreerup ChowdhuryNo ratings yet
- Communication Satellites Computer Networks PDFDocument2 pagesCommunication Satellites Computer Networks PDFRichardNo ratings yet
- CN PPT-Unit IDocument63 pagesCN PPT-Unit ISashikanth BethaNo ratings yet
- Advanced Computer Architectures: 17CS72 (As Per CBCS Scheme)Document51 pagesAdvanced Computer Architectures: 17CS72 (As Per CBCS Scheme)Aasim Inamdar0% (1)
- WinRunner For BeginnersDocument62 pagesWinRunner For BeginnersMadhan RajNo ratings yet
- 1Document17 pages1MAHALAKSHMINo ratings yet
- Laboratory 08: Audio Processing Using Matlab: ExerciseDocument9 pagesLaboratory 08: Audio Processing Using Matlab: ExerciseFaraz AbbasNo ratings yet
- labVIEW Lab ManualDocument41 pageslabVIEW Lab ManualvertikaNo ratings yet
- Notes On Computer Networks Unit 2Document14 pagesNotes On Computer Networks Unit 2Rohit Chaudhary100% (2)
- Assignment Questions: Module - 1 Application LayerDocument2 pagesAssignment Questions: Module - 1 Application LayerNaveen SettyNo ratings yet
- D.C Motor Control Using Voice CommandsDocument27 pagesD.C Motor Control Using Voice CommandsDeepakNayak1100% (5)
- Embedded-Systems Unit 2 NotesDocument30 pagesEmbedded-Systems Unit 2 NotesJoshua Duffy50% (2)
- Wireless & Mobile Comm CLOs GCUFDocument1 pageWireless & Mobile Comm CLOs GCUFTayyab HasanNo ratings yet
- AC Lab Manual R22Document92 pagesAC Lab Manual R22vijayabhargavi.sapuri2011100% (1)
- Eca NotesDocument220 pagesEca NotesKiranmai KonduruNo ratings yet
- Syllabus: Module 3A-Transducers & PLCDocument24 pagesSyllabus: Module 3A-Transducers & PLCRaja G VNo ratings yet
- HAL 102 - LabDocument43 pagesHAL 102 - LabSyrd MdeNo ratings yet
- Sheet 10 (CH 13)Document3 pagesSheet 10 (CH 13)Srinivas VemulaNo ratings yet
- Einfochips Interview QuestionsDocument1 pageEinfochips Interview Questionsshafi hasmani100% (1)
- Distributed SPCDocument106 pagesDistributed SPCKamal Singh RathoreNo ratings yet
- NPTELDocument11 pagesNPTELJinendra Jain100% (2)
- Chapter 6 Basic Input and Output InterfaceDocument38 pagesChapter 6 Basic Input and Output InterfacePetra Kalasa100% (1)
- IAT-III Question Paper With Solution of 18CS734 User Interface Design Jan-2022-Vivia JohnDocument7 pagesIAT-III Question Paper With Solution of 18CS734 User Interface Design Jan-2022-Vivia JohnDarshan R GowdaNo ratings yet
- Cordect: Wireless Access SystemDocument24 pagesCordect: Wireless Access Systemarjun c chandrathil100% (1)
- Course File - WSNDocument20 pagesCourse File - WSNajaychhotu100% (1)
- WT Final Notes 2015Document164 pagesWT Final Notes 2015Nilesh PatilNo ratings yet
- 8051 Timer CounterDocument40 pages8051 Timer Counterআশিক পালোয়ানNo ratings yet
- PC FileDocument57 pagesPC FileAvinash VadNo ratings yet
- 1) Aim: Demonstration of Preprocessing of Dataset Student - ArffDocument26 pages1) Aim: Demonstration of Preprocessing of Dataset Student - ArffKota Venkata JagadeeshNo ratings yet
- Unit 1 - Part2 - Multiple AccessDocument44 pagesUnit 1 - Part2 - Multiple AccessSimran100% (1)
- Project Report On Tic Tac Toe Game Using JavaDocument15 pagesProject Report On Tic Tac Toe Game Using JavaAbuNo ratings yet
- Strain Guages: Bounded and Unbounded Strain GaugesDocument5 pagesStrain Guages: Bounded and Unbounded Strain Gaugessania rahmanNo ratings yet
- Delta ModulationDocument9 pagesDelta ModulationRUTUJA GOGULWARNo ratings yet
- Wireless and Mobile CommunicationDocument26 pagesWireless and Mobile CommunicationSrinidhi BheesetteNo ratings yet
- JNTUK M.Tech R13 CNC SyllabusDocument18 pagesJNTUK M.Tech R13 CNC Syllabuschakri474No ratings yet
- Model 1Document22 pagesModel 1Vinay MLNo ratings yet
- Internship Report Core JavaDocument46 pagesInternship Report Core JavaAaditya Tyagi100% (1)
- UNIT-5: Task CommunicationDocument30 pagesUNIT-5: Task CommunicationFarheenNo ratings yet
- Matlab File - Deepak - Yadav - Bca - 4TH - Sem - A50504819015Document59 pagesMatlab File - Deepak - Yadav - Bca - 4TH - Sem - A50504819015its me Deepak yadavNo ratings yet
- Voice Morphing Seminar ReportDocument36 pagesVoice Morphing Seminar ReportVinay ReddyNo ratings yet
- Allen Joy: To Enhance My Professional Skills in A Dynamic and Stable WorkplaceDocument3 pagesAllen Joy: To Enhance My Professional Skills in A Dynamic and Stable WorkplaceJijila JoseNo ratings yet
- 6 Transport LayerDocument47 pages6 Transport LayerTutun JuhanaNo ratings yet
- Unit 4 DCN Lecture Notes 46 54Document21 pagesUnit 4 DCN Lecture Notes 46 54arun kaushikNo ratings yet
- 5th Sem DSP Lab ManualDocument107 pages5th Sem DSP Lab ManualHemanth KumarNo ratings yet
- CTRLS Datacenter QuestionsDocument12 pagesCTRLS Datacenter QuestionsDevendraO'MarshallNo ratings yet
- TCP in Wireless DomainDocument30 pagesTCP in Wireless DomainMurugan Antham RNo ratings yet
- CAMEL: Intelligent Networks for the GSM, GPRS and UMTS NetworkFrom EverandCAMEL: Intelligent Networks for the GSM, GPRS and UMTS NetworkRating: 2 out of 5 stars2/5 (1)
- Earth and Atmospheric Disaster Management Natural and Man-madeFrom EverandEarth and Atmospheric Disaster Management Natural and Man-madeNo ratings yet
- VTU ECE CNLAB Manual 15ECL68Document2 pagesVTU ECE CNLAB Manual 15ECL68raghudatheshgp50% (4)
- 15ecl48 VTU Raghudathesh RC Wein Bridge OscillatorsDocument7 pages15ecl48 VTU Raghudathesh RC Wein Bridge OscillatorsraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-Instrumentation Amplifier PDFDocument6 pages15ecl48-VTU-raghudathesh-Instrumentation Amplifier PDFraghudatheshgpNo ratings yet
- Unit5-VTU-Management-Entrepreneurship-Raghudathesh G P-Lata S HDocument17 pagesUnit5-VTU-Management-Entrepreneurship-Raghudathesh G P-Lata S HraghudatheshgpNo ratings yet
- VTU EC EBCS CCN Module1 RaghudatheshDocument94 pagesVTU EC EBCS CCN Module1 Raghudatheshraghudatheshgp100% (1)
- 15ecl48-VTU-raghudathesh-Adder Integrator and Differentiator PDFDocument14 pages15ecl48-VTU-raghudathesh-Adder Integrator and Differentiator PDFraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-r 2r Dac PDFDocument5 pages15ecl48-VTU-raghudathesh-r 2r Dac PDFraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-Adder Integrator and Differentiator PDFDocument14 pages15ecl48-VTU-raghudathesh-Adder Integrator and Differentiator PDFraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-Instrumentation Amplifier PDFDocument6 pages15ecl48-VTU-raghudathesh-Instrumentation Amplifier PDFraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-amplitude Modulation PDFDocument4 pages15ecl48-VTU-raghudathesh-amplitude Modulation PDFraghudatheshgpNo ratings yet
- Unit8 VTU-Management-Preparation of Project Report Raghudathesh G P LATA S HDocument16 pagesUnit8 VTU-Management-Preparation of Project Report Raghudathesh G P LATA S Hraghudatheshgp100% (2)
- 15ecl48-VTU-raghudathesh-Low Pass and High Pass Filters PDFDocument9 pages15ecl48-VTU-raghudathesh-Low Pass and High Pass Filters PDFraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-BJT MIXER PDFDocument2 pages15ecl48-VTU-raghudathesh-BJT MIXER PDFraghudatheshgp100% (1)
- 15ecl48 VTU LIC LAB Raghudathesh Adder Integrator and DifferentiatorDocument14 pages15ecl48 VTU LIC LAB Raghudathesh Adder Integrator and Differentiatorraghudatheshgp50% (4)
- 15ecl48 VTU Raghudathesh RC Wein Bridge OscillatorsDocument7 pages15ecl48 VTU Raghudathesh RC Wein Bridge OscillatorsraghudatheshgpNo ratings yet
- Unit2-VTU-Management-Planning-Raghudathesh G P-Lata S HDocument16 pagesUnit2-VTU-Management-Planning-Raghudathesh G P-Lata S Hraghudatheshgp100% (3)
- 15ecl48 VTU Raghudathesh Astable Monostable MultivibratorDocument4 pages15ecl48 VTU Raghudathesh Astable Monostable MultivibratorraghudatheshgpNo ratings yet
- 15ecl48-VTU-raghudathesh-Low Pass and High Pass FiltersDocument9 pages15ecl48-VTU-raghudathesh-Low Pass and High Pass FiltersraghudatheshgpNo ratings yet
- 15ecl48 VTU Raghudathesh R 2r DacDocument5 pages15ecl48 VTU Raghudathesh R 2r Dacraghudatheshgp100% (1)
- Unit1-VTU-Management-Introduction-Raghudathesh G P-Lata S HDocument28 pagesUnit1-VTU-Management-Introduction-Raghudathesh G P-Lata S Hraghudatheshgp100% (2)
- Unit5-VTU-Management-Entrepreneurship-Raghudathesh G P-Lata S HDocument17 pagesUnit5-VTU-Management-Entrepreneurship-Raghudathesh G P-Lata S HraghudatheshgpNo ratings yet
- A4 Bruder Pres UserDocument37 pagesA4 Bruder Pres UserraghudatheshgpNo ratings yet
- Graduate Report TejasDocument150 pagesGraduate Report TejasraghudatheshgpNo ratings yet
- The IDDQ MysteryDocument9 pagesThe IDDQ MysteryraghudatheshgpNo ratings yet
- Asian Development Foundation College: Lesson No.: 1 Hardware BasicsDocument6 pagesAsian Development Foundation College: Lesson No.: 1 Hardware Basicsjan niño villacorteNo ratings yet
- Emu LogDocument4 pagesEmu LogDamas Eka KusumaNo ratings yet
- Imac 24 Service ManualDocument10 pagesImac 24 Service ManualsnugboiNo ratings yet
- Sinus - Service and Repair ManualDocument74 pagesSinus - Service and Repair ManualgumepesaNo ratings yet
- Regular ExpressionsDocument9 pagesRegular ExpressionsThi HaNo ratings yet
- Switch de Comunicaciones SB-22 a-PTDocument2 pagesSwitch de Comunicaciones SB-22 a-PTTam ArgentoNo ratings yet
- AOC V22tDocument2 pagesAOC V22trashikakaranNo ratings yet
- Patran 2008r1 Doc InstallDocument148 pagesPatran 2008r1 Doc InstallAmir Ali JanbakhshNo ratings yet
- ST Piping Systems Data Charts 2013Document18 pagesST Piping Systems Data Charts 2013Nasrul SalmanNo ratings yet
- Oil Dielectric Test Sets: 0-60 Kvac and 0-100 KvacDocument3 pagesOil Dielectric Test Sets: 0-60 Kvac and 0-100 KvacNurhadi SukmanaNo ratings yet
- Ub Cam Pro ManualDocument18 pagesUb Cam Pro ManualSlađa ObradovićNo ratings yet
- 3352 PDFDocument6 pages3352 PDFMSNo ratings yet
- Arduino v2Document68 pagesArduino v2sadekNo ratings yet
- Creating Macros in PowerPointDocument2 pagesCreating Macros in PowerPointhilariorcNo ratings yet
- Spec 500 MT 020514 Godown 500mtDocument16 pagesSpec 500 MT 020514 Godown 500mtdraqbhattiNo ratings yet
- Pub002 003 00 - 1011Document88 pagesPub002 003 00 - 1011jones0055No ratings yet
- Sharp Lc32a37mDocument92 pagesSharp Lc32a37mRaja100% (1)
- Ncp-Mci-5.15 Exam Dump From JulieDocument63 pagesNcp-Mci-5.15 Exam Dump From JulieDev BoseNo ratings yet
- (Handover Success Rate) Optimization ManualDocument30 pages(Handover Success Rate) Optimization ManualPaul KabeyaNo ratings yet
- ADAPT ABI v5 Getting StartedDocument38 pagesADAPT ABI v5 Getting StartedMohd FaizalNo ratings yet
- Notebook Computer Notebook Computer W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W249BUQ W249BUQ Service ManualDocument5 pagesNotebook Computer Notebook Computer W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W241BU/W241BUQ/W240BU/W245BUQ/W248BUQ/ W249BUQ W249BUQ Service ManualTiago da Silva PereiraNo ratings yet
- 8086 All Basic ProgramsDocument34 pages8086 All Basic ProgramsSudhagarNo ratings yet
- B/Dharmadutha College. First Term Test - 2017: Information and Communication TechnologyDocument3 pagesB/Dharmadutha College. First Term Test - 2017: Information and Communication TechnologyrisanNo ratings yet
- Cheap Impostor ManualDocument17 pagesCheap Impostor Manualanbsb1No ratings yet
- How To Install Kotobee Author PDFDocument17 pagesHow To Install Kotobee Author PDFSamantha RullaNo ratings yet
- Airscout Flow Meters BrochureDocument4 pagesAirscout Flow Meters Brochurevishal.nithamNo ratings yet