You might also like
- Modelización de Sistemas MecánicosDocument47 pagesModelización de Sistemas MecánicosahigueraNo ratings yet
- Análisis Cinemático de Mecanismos Por Métodos NuméricosDocument19 pagesAnálisis Cinemático de Mecanismos Por Métodos Numéricossole hatake llepNo ratings yet
- ConsultaDocument15 pagesConsultaDaniel OrozcoNo ratings yet
- Coleccion ProblemasDocument370 pagesColeccion ProblemasFugashiNo ratings yet
- Coleccion Problemas 2015Document370 pagesColeccion Problemas 2015alex6ggNo ratings yet
- Primitivas de GraficaciónDocument3 pagesPrimitivas de GraficaciónMiguel 1No ratings yet
- Mafia LeeDocument27 pagesMafia LeeElvis PCNo ratings yet
- Ejercicio DHDocument5 pagesEjercicio DHAlex Atao EnriquezNo ratings yet
- GEOMETRIA (Formulario de 2º Bachillerato)Document9 pagesGEOMETRIA (Formulario de 2º Bachillerato)Pedro Miguel Bustillos Cordero0% (1)
- 02 Capitulo2 PDFDocument18 pages02 Capitulo2 PDFAlejandro GonzalezNo ratings yet
- Regresion Lineal y Regresion PoligonalDocument19 pagesRegresion Lineal y Regresion PoligonalDerrick HortonNo ratings yet
- Guia de CalculoDocument30 pagesGuia de Calculoalberto_soto_2011No ratings yet
- Libro de Análisis Vectorial de Evaristo 2Document28 pagesLibro de Análisis Vectorial de Evaristo 2Indira Ocampo JustinianoNo ratings yet
- 02 Geometria Analitica en El Espacio Recta y PlanoDocument38 pages02 Geometria Analitica en El Espacio Recta y PlanoMiguel BonillaNo ratings yet
- Investigación de Tipos de Parametrización (Concepto, Definiciones) PDFDocument11 pagesInvestigación de Tipos de Parametrización (Concepto, Definiciones) PDFpedro garciaNo ratings yet
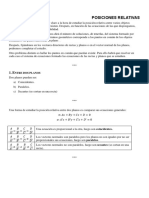
- Resumen Posiciones RelativasDocument6 pagesResumen Posiciones Relativasiridium2000No ratings yet
- Resolucion Cadena CerradaDocument23 pagesResolucion Cadena CerradardvnavarroNo ratings yet
- Ucv-Regresion y CorrelacionDocument24 pagesUcv-Regresion y CorrelacionCarlos MinanoNo ratings yet
- Apuntes de Algebra Vectorial para Estudiantes de ElectromagnetismoDocument24 pagesApuntes de Algebra Vectorial para Estudiantes de ElectromagnetismoAsh CrimsonNo ratings yet
- Tarea Calificada1 Curvas PolaresDocument9 pagesTarea Calificada1 Curvas PolaresOmar Joel Castro AgurtoNo ratings yet
- Integral EsDocument9 pagesIntegral EsantonesproNo ratings yet
- La Recta - Geometría AnalíticaDocument36 pagesLa Recta - Geometría AnalíticaLara Tiene con quéNo ratings yet
- Introducción Al Metodo de Elementos FinitosDocument33 pagesIntroducción Al Metodo de Elementos Finitosjorge.jimenez100% (3)
- Investigación Unidad 2Document7 pagesInvestigación Unidad 2Itza Coloriano RojasNo ratings yet
- Taller CoordenadasDocument14 pagesTaller Coordenadasfaber antonio carreño Hernandez69% (26)
- Trabajo de MecanismoDocument25 pagesTrabajo de MecanismoJennifer ZabalaNo ratings yet
- IntroducciónDocument13 pagesIntroducciónMelii BustiilloNo ratings yet
- Unidad IiDocument20 pagesUnidad IiNeira JhonNo ratings yet
- Unidad Equipo 4Document21 pagesUnidad Equipo 4Valee Aguilar BernalNo ratings yet
- El Metodo de Minimos CuadradosDocument6 pagesEl Metodo de Minimos CuadradosCristhian Ulises JulcaNo ratings yet
- Resort eDocument26 pagesResort eFranklin Dran Coronado ChavezNo ratings yet
- Identidades VectorialesDocument11 pagesIdentidades VectorialesVane OñateNo ratings yet
- Unidad IIDocument39 pagesUnidad IIalantruco123nzNo ratings yet
- Ometria A.2Document16 pagesOmetria A.2Kevin OsedaNo ratings yet
- Interpretación Geométrica de Las OperacionesDocument9 pagesInterpretación Geométrica de Las OperacionesLaumix Gloom GloonmNo ratings yet
- CircunferenciaDocument7 pagesCircunferenciaAlexis FloresNo ratings yet
- Capitulo Ii Algebra Vectorial IDocument65 pagesCapitulo Ii Algebra Vectorial IJorgeTaipeNo ratings yet
- Regresión Lineal SimpleDocument12 pagesRegresión Lineal SimpleJordy Bravo50% (4)
- Criterios ConvergenciaDocument11 pagesCriterios ConvergenciaAlex Zabaleta GorostidiNo ratings yet
- Experiencia 3 - Descomposición y Paralelogramo de FuerzasDocument6 pagesExperiencia 3 - Descomposición y Paralelogramo de FuerzasDavid J. Sandoval GarciaNo ratings yet
- Promedios Móviles, Mínimos Cuadrados y Regresión LinealDocument17 pagesPromedios Móviles, Mínimos Cuadrados y Regresión LinealJon JonesNo ratings yet
- Tipos de CoordenadasDocument6 pagesTipos de CoordenadasLogan JD Tdf TdayNo ratings yet
- Fisica 1 Ecuaciones EmpiricasDocument17 pagesFisica 1 Ecuaciones EmpiricasWendyCastilloSalazarNo ratings yet
- Tarea 3 Cálculo VectorialDocument17 pagesTarea 3 Cálculo VectorialXimena GuerraNo ratings yet
- FFIE 1213 Anexo Coordenadas Intrinsecas Tema2Document5 pagesFFIE 1213 Anexo Coordenadas Intrinsecas Tema2ramarseNo ratings yet
- Taller Coordenadas Cilindricas y EsfericasDocument20 pagesTaller Coordenadas Cilindricas y EsfericasJordan Raul HERNANDEZ PENANo ratings yet
- Síntesis de MecanismosDocument9 pagesSíntesis de MecanismosCarlos cruz lealNo ratings yet
- Practica 2 Parte de Lab de MecanicaDocument9 pagesPractica 2 Parte de Lab de MecanicaNashalyNo ratings yet
- S24 - Curvas Paramétricas en R2Document14 pagesS24 - Curvas Paramétricas en R2Luz AlvarezNo ratings yet
- Lugar de Las RaicesDocument19 pagesLugar de Las RaicesDaya BallagánNo ratings yet
- Aproximaciones Por Mínimos CuadradosDocument6 pagesAproximaciones Por Mínimos CuadradosANDREANo ratings yet
- 1 Ley Coulomb LinealDocument8 pages1 Ley Coulomb LinealANGIE GABRIELA RODRÍGUEZ GAITANNo ratings yet
- Método Aproximado de CompensaciónDocument5 pagesMétodo Aproximado de CompensaciónGustavo Diaz MejiaNo ratings yet
- Vectores 2Document9 pagesVectores 2Juan Jose Perez CastroNo ratings yet
- Tema 7 EngranajesDocument52 pagesTema 7 EngranajesCarlos SandovalNo ratings yet
- Clase 2 - Comunicación Oral y Escrita - La ComunicaciónDocument37 pagesClase 2 - Comunicación Oral y Escrita - La ComunicaciónCarlos SandovalNo ratings yet
- Tema 5 Elementos RoscadosDocument90 pagesTema 5 Elementos RoscadosCarlos SandovalNo ratings yet
- Tema 7 EngranajesDocument52 pagesTema 7 EngranajesCarlos SandovalNo ratings yet
- Tema 4 Diseño de EjesDocument54 pagesTema 4 Diseño de EjesCarlos SandovalNo ratings yet
- Tema 4 Diseño de EjesDocument23 pagesTema 4 Diseño de EjesCarlos SandovalNo ratings yet
- Tema 4 Diseño de EjesDocument23 pagesTema 4 Diseño de EjesCarlos SandovalNo ratings yet
- Dinamica de SistemasDocument12 pagesDinamica de SistemasCarlos SandovalNo ratings yet
- Análisis Exploratorio de DatosDocument88 pagesAnálisis Exploratorio de DatosCarlos SandovalNo ratings yet
- Fall A CableDocument7 pagesFall A Cables200402500No ratings yet
- Presentación LABELECTRONICADocument7 pagesPresentación LABELECTRONICACarlos SandovalNo ratings yet
- Presentación LABELECTRONICADocument7 pagesPresentación LABELECTRONICACarlos SandovalNo ratings yet
- Tarjeta de VentilacionDocument5 pagesTarjeta de VentilacionCarlos SandovalNo ratings yet
- Historia de La Dinámica de SistemasDocument2 pagesHistoria de La Dinámica de SistemasDimelsaAndreaCaceres100% (1)
- Historia de La Dinámica de SistemasDocument2 pagesHistoria de La Dinámica de SistemasDimelsaAndreaCaceres100% (1)
- Resumen 17-23Document2 pagesResumen 17-23Carlos SandovalNo ratings yet
- OptotriacsDocument8 pagesOptotriacsRené Francisco Utreras CrucesNo ratings yet
- (HaremSubs) Paradise InnDocument78 pages(HaremSubs) Paradise InnEinzelroll Dunkle WeltNo ratings yet
- Resolucion Deber 3Document9 pagesResolucion Deber 3ArturoNo ratings yet
- Vigas Contínuas y Pórticos HiperestáticosDocument138 pagesVigas Contínuas y Pórticos Hiperestáticoshernan8585% (27)
- Ejercicios Resueltos Diagrama de Fases - Daniel Gomariz - Ingeniería IndustrialDocument20 pagesEjercicios Resueltos Diagrama de Fases - Daniel Gomariz - Ingeniería IndustrialDaniel Gomariz63% (8)
- ALUMINIIO y SUS ALEACIONES PDFDocument19 pagesALUMINIIO y SUS ALEACIONES PDFWendy GarciaNo ratings yet
- Laboratorio de ElectricidadDocument3 pagesLaboratorio de ElectricidadDeivid William TorresNo ratings yet
- EI - G2 Transformador y AutotransformadorDocument4 pagesEI - G2 Transformador y AutotransformadorDeivid William TorresNo ratings yet
- Bronce Ban-F Aluminio Din 1714 RedondoDocument2 pagesBronce Ban-F Aluminio Din 1714 RedondoCarlos SandovalNo ratings yet
- ALUMINIIO y SUS ALEACIONES PDFDocument19 pagesALUMINIIO y SUS ALEACIONES PDFWendy GarciaNo ratings yet
- (HaremSubs) Harem CastleDocument231 pages(HaremSubs) Harem CastleCarlos SandovalNo ratings yet
- Fisica 1 Ejercicios DiagnosticoDocument5 pagesFisica 1 Ejercicios DiagnosticoVanessa lemaNo ratings yet
- VectoresDocument5 pagesVectoresTerenzio Soldovieri C.No ratings yet
- Solucionario Guía Práctica Movimiento I Vectores y Escalares 2014 PDFDocument10 pagesSolucionario Guía Práctica Movimiento I Vectores y Escalares 2014 PDFValeria CarolinaNo ratings yet
- Campos VectorialesDocument5 pagesCampos VectorialesdricardocanNo ratings yet
- Consolidado Calculo Quiz 1 Semana 3Document82 pagesConsolidado Calculo Quiz 1 Semana 3Lennys ArenasNo ratings yet
- Crucigrama FisicaDocument2 pagesCrucigrama Fisicanathaly carabali corcinoNo ratings yet
- MAGNITUDES y UNIDADES (1)Document11 pagesMAGNITUDES y UNIDADES (1)Paly MoraNo ratings yet
- Lab 1 Teoria ErroresDocument36 pagesLab 1 Teoria ErroresFamilia Ríos PeredaNo ratings yet
- Semana 2 FísicaDocument4 pagesSemana 2 FísicaJoel OrtizNo ratings yet
- U1-2 FísicaDocument10 pagesU1-2 FísicaEnzo AguilarNo ratings yet
- La SenoideDocument6 pagesLa SenoideMallely JinxNo ratings yet
- Transformada de LaplaceDocument6 pagesTransformada de LaplacegreinnyNo ratings yet
- Instructivo Álgebra Lineal 2018-3Document4 pagesInstructivo Álgebra Lineal 2018-3María GonzalezNo ratings yet
- El Metodo de Volumen de ControlDocument27 pagesEl Metodo de Volumen de ControlNoemi Quiñones MoronNo ratings yet
- Cuanto AprendiDocument3 pagesCuanto AprendiSvimx Vilchez MinayaNo ratings yet
- Ejercicio de Fisica Sesion 2Document6 pagesEjercicio de Fisica Sesion 2ESTEFANY VICTORIA BETSHAVE MONTOYA SANTOSNo ratings yet
- Cuadro SinopticoDocument2 pagesCuadro Sinopticoestrella ortizNo ratings yet
- Vectores para Fisica BasicaDocument8 pagesVectores para Fisica BasicaSuheidy Maria SanchezNo ratings yet
- Laboratorio de Fisica IiDocument7 pagesLaboratorio de Fisica Iifernando ortega cardozoNo ratings yet
- Curso de Derive1Document23 pagesCurso de Derive1jabernal0% (1)
- Aa SUBTEMAS INGENIERIA EN SISTEMASDocument76 pagesAa SUBTEMAS INGENIERIA EN SISTEMASArmando oyoNo ratings yet
- Algebra LinealDocument61 pagesAlgebra Linealjjfe012100% (1)
- Bibliografia de Electricidad y ElectronicaaDocument2 pagesBibliografia de Electricidad y ElectronicaaRubenBosque67% (3)
- Curva MasaDocument4 pagesCurva MasaGroedwinNo ratings yet
- Examen-1q-1bgu-Fisica GrupalDocument5 pagesExamen-1q-1bgu-Fisica GrupalDilan AndresNo ratings yet
- Preliminares para Funciones VectorialesDocument28 pagesPreliminares para Funciones VectorialesDiego Gutierrez AyalaNo ratings yet
- Capitulo 1 Introduccion Mediciones Estimaciones v3Document77 pagesCapitulo 1 Introduccion Mediciones Estimaciones v3JUAN FRANCISCO ESCOBAR MIRANDANo ratings yet
- 9Document20 pages9JOSUE ARTURO MONTOYA BASTIDASNo ratings yet
- F BGD PCV - modeLO. OficialDocument10 pagesF BGD PCV - modeLO. OficialedgarNo ratings yet
- Física 10º Semanas 19 Al 30 de AbrilpdfDocument6 pagesFísica 10º Semanas 19 Al 30 de AbrilpdfRonald SaavedraNo ratings yet