You might also like
- Grados de Libertad PDFDocument15 pagesGrados de Libertad PDFYda Fernandez EspinNo ratings yet
- S 3 EutiDocument10 pagesS 3 EutipakoNo ratings yet
- Introduccion A Los Mecanismos PDFDocument6 pagesIntroduccion A Los Mecanismos PDFMary SquerraNo ratings yet
- Introducción Grados de LibertadDocument3 pagesIntroducción Grados de LibertadAnibalHuamanNo ratings yet
- Cinemática y CinéticaDocument8 pagesCinemática y CinéticaYerannys Guiñan de Valenzuela0% (1)
- Eslabones ParesDocument9 pagesEslabones Pares'Isaac Santana'No ratings yet
- Grados de libertad mecanismos máquinasDocument25 pagesGrados de libertad mecanismos máquinasuriel1293100% (1)
- Cl1 Cinematica de MecanismosDocument33 pagesCl1 Cinematica de MecanismosJesus CesarNo ratings yet
- 3.1. Qué Son Los Mecanismos 2Document27 pages3.1. Qué Son Los Mecanismos 2Eddy Cadena GrandaNo ratings yet
- 1.3 Grado de LibertadDocument8 pages1.3 Grado de LibertadChololo Jr BansNo ratings yet
- Par Cinemático y Grados de LibertadDocument4 pagesPar Cinemático y Grados de Libertadjavier_toca0% (1)
- Reporte de MaquetaDocument13 pagesReporte de MaquetaRodrigo Jesús Vázquez HerediaNo ratings yet
- Cuestionario para La Prueba de Mecanismos. Yasmany Aguilar.Document7 pagesCuestionario para La Prueba de Mecanismos. Yasmany Aguilar.Steven RonquilloNo ratings yet
- Mecanismos ApuntesDocument5 pagesMecanismos ApuntesWilliam LopezNo ratings yet
- Cl1 Cinematica de MecanismosDocument33 pagesCl1 Cinematica de MecanismosManuel Urbina CarrascoNo ratings yet
- Introducción A MecanismosDocument42 pagesIntroducción A MecanismosDaniel DiazNo ratings yet
- Teoria de MaquinasDocument53 pagesTeoria de MaquinasJaime Espinoza SandovalNo ratings yet
- Cinemática de MecanismosDocument25 pagesCinemática de MecanismosGabriel CastilloNo ratings yet
- Fundamentos de cinemática en mecanismos planosDocument9 pagesFundamentos de cinemática en mecanismos planosManuel Francisco Romero CalderónNo ratings yet
- Apunte de clase V3 - Cinemática de Mecanismos 2024Document16 pagesApunte de clase V3 - Cinemática de Mecanismos 2024ceciNo ratings yet
- Unidad 2-Fundamentos de La CinemáticaDocument14 pagesUnidad 2-Fundamentos de La CinemáticaNayeli EsquivelNo ratings yet
- Mecanismos Apuntes Jose Luis Hernandez Suarez TESCHIDocument61 pagesMecanismos Apuntes Jose Luis Hernandez Suarez TESCHIJorGe Luiz AmbarioNo ratings yet
- MOVILIDADDocument13 pagesMOVILIDADlmaldonado_349011No ratings yet
- Definiciones mecánicas básicasDocument15 pagesDefiniciones mecánicas básicasMarco AdameNo ratings yet
- ME02 - Fundamentos de Cinemática v4Document68 pagesME02 - Fundamentos de Cinemática v4Jaimar -3-No ratings yet
- Fundamentos de CinematicaDocument55 pagesFundamentos de CinematicaLeonel José AlvaradoNo ratings yet
- Lechuga 12Document7 pagesLechuga 12Manu sorNo ratings yet
- Mecanismo 4 Barras ReporteDocument13 pagesMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- DesarrollarDocument3 pagesDesarrollarAldair RobertoNo ratings yet
- Mecanismos MML2Document41 pagesMecanismos MML2Manuel GonzalezNo ratings yet
- Análisis estructural de mecanismosDocument36 pagesAnálisis estructural de mecanismosAlEjandro KEvinNo ratings yet
- Introducción a los mecanismos: clasificación y conceptos básicosDocument13 pagesIntroducción a los mecanismos: clasificación y conceptos básicosjuliogomez008No ratings yet
- TMM-02 Mecanismos Articulados PlanosDocument24 pagesTMM-02 Mecanismos Articulados PlanosNestorRinconMalloNo ratings yet
- GDL o grados de libertad en mecanismosDocument20 pagesGDL o grados de libertad en mecanismoscarlos fernando romero hortuaNo ratings yet
- Practica #1 Conceptos Básicos de Dinámica - 2077517Document6 pagesPractica #1 Conceptos Básicos de Dinámica - 2077517MooncrystalNo ratings yet
- MecanismosDocument5 pagesMecanismosCristian Eduardo Murillo CamarenaNo ratings yet
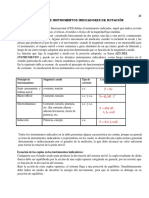
- 5 Dinamica de Los Instrumentos Indicadores de RotacionDocument41 pages5 Dinamica de Los Instrumentos Indicadores de Rotacionmilton rafael soriaNo ratings yet
- Clase #6 Movilidad y Ecuación de KutzbachDocument18 pagesClase #6 Movilidad y Ecuación de Kutzbachboletasprimaria.uecmscNo ratings yet
- Mecanismos y VibracionesDocument70 pagesMecanismos y VibracionesRicardo TabangoNo ratings yet
- Análisis y Síntesis de Mecanismos ResumenDocument17 pagesAnálisis y Síntesis de Mecanismos ResumenGAM TZ- Tutos y Covers100% (1)
- Departamento de Energía Y MecánicaDocument5 pagesDepartamento de Energía Y MecánicaJEAN CARLOS CAMPAÑA RAMIREZNo ratings yet
- Análisis de posición y velocidad de un mecanismo de 4 barrasDocument13 pagesAnálisis de posición y velocidad de un mecanismo de 4 barrasRicardo ChanNo ratings yet
- ASM Tema 1Document93 pagesASM Tema 1Anita MendietaNo ratings yet
- MecanismosDocument19 pagesMecanismosPablo MelendezNo ratings yet
- Análisis y Síntesis de Mecanismos 1Document59 pagesAnálisis y Síntesis de Mecanismos 1Omar Negrin Mendez0% (1)
- Mecánica y MecanismosDocument44 pagesMecánica y MecanismosCatalina HerreraNo ratings yet
- MecanismosDocument48 pagesMecanismosFrancisco Javier Izaguirre JimenezNo ratings yet
- Clase 1 - Cinematica y DinamicaDocument13 pagesClase 1 - Cinematica y DinamicaPatricio SabettaNo ratings yet
- Mecanismos ArticuladosDocument31 pagesMecanismos ArticuladosFrancisco Javier Villate GaonaNo ratings yet
- UNIDAD IDocument13 pagesUNIDAD Ifelipemontesinos311No ratings yet
- Manivela BalancinDocument15 pagesManivela BalancinJorge Antonio Silva RodriguezNo ratings yet
- MECANISMOSDocument6 pagesMECANISMOSLeonardo Vidal CorralesNo ratings yet
- Laboratorio de Mecanismos 6MM2Document32 pagesLaboratorio de Mecanismos 6MM2leila loveNo ratings yet
- Resumen Unidad 02Document19 pagesResumen Unidad 02JOSE JESUS MARTINEZ ACOSTANo ratings yet
- TEMA 1. Conceptos y Definiciones en Cinemática.Document55 pagesTEMA 1. Conceptos y Definiciones en Cinemática.lucatoni999No ratings yet
- Ejercicios de Integrales de Línea, Superficie y VolumenFrom EverandEjercicios de Integrales de Línea, Superficie y VolumenRating: 4 out of 5 stars4/5 (2)
- Integra DoraDocument13 pagesIntegra DoraNoyo Ocb0% (1)
- Elementos DimencionalesDocument10 pagesElementos DimencionalesNoyo OcbNo ratings yet
- Norma Dim 19245Document9 pagesNorma Dim 19245Noyo OcbNo ratings yet
- Conclusión Electronica DigiDocument1 pageConclusión Electronica DigiNoyo OcbNo ratings yet
- INTRODUCCIÓN AerogeneradorDocument1 pageINTRODUCCIÓN AerogeneradorNoyo OcbNo ratings yet
- Reporte AluminioDocument6 pagesReporte AluminioNoyo OcbNo ratings yet
- Ficha PaGar UT ChetumalDocument1 pageFicha PaGar UT ChetumalNoyo OcbNo ratings yet
- Arco Electrico EquipoDocument29 pagesArco Electrico EquipoNoyo OcbNo ratings yet
- Cuestionario MaterialesDocument2 pagesCuestionario MaterialesNoyo OcbNo ratings yet
- UNIDAD2 Mecanismo OnorioDocument13 pagesUNIDAD2 Mecanismo OnorioNoyo OcbNo ratings yet
- Mecanismo Maquina InvesDocument8 pagesMecanismo Maquina InvesNoyo OcbNo ratings yet
- Carta Prorroga PagoDocument1 pageCarta Prorroga PagoQuique FLow-ers78% (32)
- Que Es Un Semiconductor PDFDocument24 pagesQue Es Un Semiconductor PDFmelbasolarteNo ratings yet
- CASO PeliculaDocument4 pagesCASO PeliculaNoyo OcbNo ratings yet
- Integral DefinidaDocument19 pagesIntegral DefinidaFrancisco Javier Gomez EscandonNo ratings yet
- 15 MaterialesDocument1 page15 MaterialesNoyo OcbNo ratings yet
- Reporte LegoDocument5 pagesReporte LegoNoyo OcbNo ratings yet
- 2 - Tarea - Personajes Del Cálculo IntegralDocument12 pages2 - Tarea - Personajes Del Cálculo IntegralNoyo OcbNo ratings yet
- Diapositivas de Cerámicos 1Document13 pagesDiapositivas de Cerámicos 1Shaulo Molina DomínguezNo ratings yet
- PORTADA PrácticasDocument4 pagesPORTADA PrácticasNoyo OcbNo ratings yet
- Examen 1 Onorio CaraveoDocument2 pagesExamen 1 Onorio CaraveoNoyo OcbNo ratings yet
- Reporte RobotDocument7 pagesReporte RobotNoyo OcbNo ratings yet
- Auto CadDocument20 pagesAuto CadNoyo OcbNo ratings yet
- Cuestionario MaterialesDocument2 pagesCuestionario MaterialesNoyo OcbNo ratings yet
- Práctica 1. PolímerosDocument3 pagesPráctica 1. PolímerosNoyo Ocb0% (1)
- PORTADA PrácticasDocument4 pagesPORTADA PrácticasNoyo OcbNo ratings yet
- Practica 2 OnorioDocument2 pagesPractica 2 OnorioNoyo OcbNo ratings yet
- Curp OnorioDocument1 pageCurp OnorioNoyo OcbNo ratings yet
- Solecito: Te ExtrañoDocument1 pageSolecito: Te ExtrañoNoyo OcbNo ratings yet
- Unidad 3 - Paso 3 - Métodos Instrumentales..Document7 pagesUnidad 3 - Paso 3 - Métodos Instrumentales..nanaNo ratings yet
- Exposicion Temas Lengua y LiteraturaDocument3 pagesExposicion Temas Lengua y LiteraturaLogan FRNo ratings yet
- Programa Analítico TEC 12Document26 pagesPrograma Analítico TEC 12Sarah GonzálezNo ratings yet
- Pbot Planeta Rica Cordoba PDFDocument152 pagesPbot Planeta Rica Cordoba PDFJulio MartinezNo ratings yet
- Repensar La CuencaDocument10 pagesRepensar La CuencaRichard Ore CayetanoNo ratings yet
- Ntca U1 A2 VigpDocument6 pagesNtca U1 A2 VigpAnonymous 52wpwWoLNo ratings yet
- Ejercicios Aplicación Primera Ley TermodinámicaDocument2 pagesEjercicios Aplicación Primera Ley Termodinámicaxiomara camargoNo ratings yet
- Ejercicios Reflexion y RefraccionDocument3 pagesEjercicios Reflexion y RefraccionKatya Marcela Herrera MuñozNo ratings yet
- Estimación y teoremas límite PyEDocument2 pagesEstimación y teoremas límite PyEMartiux TokitaNo ratings yet
- Estructuras-unionesDocument12 pagesEstructuras-unionesSheyla Haro VillanuevaNo ratings yet
- Respiración Hapkido PDFDocument14 pagesRespiración Hapkido PDFJEmberVillarroel75% (4)
- Proyecto Final de Sams ClubDocument22 pagesProyecto Final de Sams ClubZz.Û.Û.zZ SuaRezNo ratings yet
- Relación epistemología ingeniería sistemasDocument5 pagesRelación epistemología ingeniería sistemasDario Quintero NavarroNo ratings yet
- Los Mapas para Quinto Grado de PrimariaDocument5 pagesLos Mapas para Quinto Grado de PrimariaLucindaNo ratings yet
- Analisis de DatosDocument15 pagesAnalisis de DatosKaren Yajayra ZutaNo ratings yet
- Otros Grupos Sanguíneos V2Document36 pagesOtros Grupos Sanguíneos V2Tec Lab BoliviaNo ratings yet
- Remoción Selectiva de Tejido Cariado en La Dentición Temporal Y Permanente JovenDocument8 pagesRemoción Selectiva de Tejido Cariado en La Dentición Temporal Y Permanente JovengarciadeluisaNo ratings yet
- Reloj mecánico: principios y partesDocument7 pagesReloj mecánico: principios y partesJavier NBNo ratings yet
- Concepciones Del Sistema Jurídico PDFDocument9 pagesConcepciones Del Sistema Jurídico PDFEdgardo GallardoNo ratings yet
- Guia Raices 8º - 2022Document4 pagesGuia Raices 8º - 2022CRISTINA LEIVANo ratings yet
- Trabajo Final Fundamentos Fisoloficos.Document5 pagesTrabajo Final Fundamentos Fisoloficos.Rudy E. Ferreras100% (1)
- Sílabo Contabilidad Superior II - Sec 1 y 2 - Trujillo - 2022 IDocument15 pagesSílabo Contabilidad Superior II - Sec 1 y 2 - Trujillo - 2022 ICrissy BTNo ratings yet
- Actividad Evaluada Formación Ciudadana y Valórica 2Document2 pagesActividad Evaluada Formación Ciudadana y Valórica 2Patricia Daniela Damian Zuñiga0% (2)
- Esperanto en México ¿Una Opción Como Segunda Lengua?Document25 pagesEsperanto en México ¿Una Opción Como Segunda Lengua?Hugo Ivan Esparza AguilarNo ratings yet
- Al Pueblo Nunca Le Toca 1Document4 pagesAl Pueblo Nunca Le Toca 1Leidy SalamancaNo ratings yet
- EsterDocument11 pagesEsterGladys ArevalosNo ratings yet
- Oferta VinculanteDocument24 pagesOferta VinculanteignaciocouceiroNo ratings yet
- Liderazgo Ps OrganizacionalDocument5 pagesLiderazgo Ps OrganizacionalTania NuñezNo ratings yet
- Plan Capacitación PYME LácteosDocument38 pagesPlan Capacitación PYME LácteosCris MartinezNo ratings yet
- Repaso de Derecho.Document5 pagesRepaso de Derecho.Zarzuela Montero Robert AlexanderNo ratings yet