You might also like
- Checklist ArquiteturaDocument3 pagesChecklist ArquiteturaLucas Matias UhlmannNo ratings yet
- WAN4 (2) - Constellation Com Motor D08Document200 pagesWAN4 (2) - Constellation Com Motor D08Rodolfo Alberto100% (3)
- Arduino Intermediario PDFDocument34 pagesArduino Intermediario PDFFelipe SousaNo ratings yet
- Codigos de Erro CR-1 PDFDocument648 pagesCodigos de Erro CR-1 PDFNikole Sanchez67% (6)
- MECANICA Desconplicada 1Document38 pagesMECANICA Desconplicada 1thallesnetNo ratings yet
- Desenvolvendo Um Datalogger Para Um Hidrômetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Um Hidrômetro Com ArduinoNo ratings yet
- Memorial Descritivo Do Projeto EletricoDocument44 pagesMemorial Descritivo Do Projeto EletricophayblaNo ratings yet
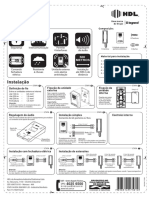
- Manual Instalação Porteiro Eletrônico HDL F8-SDocument2 pagesManual Instalação Porteiro Eletrônico HDL F8-SEduardo Henrique Pietrowski20% (5)
- Cartilha Segurança e Operação em Plataforma de Trabalho AereoDocument32 pagesCartilha Segurança e Operação em Plataforma de Trabalho AereoMário Henrique Rotta Bonfim100% (2)
- Arduino Aula 01 Introducao PDFDocument22 pagesArduino Aula 01 Introducao PDFGustavo Henrique Barroso100% (1)
- Tabel A Poder Calor I FicoDocument1 pageTabel A Poder Calor I FicoJulio100% (1)
- IMPRESSÃO 3D: A Tecnologia Do MometoDocument5 pagesIMPRESSÃO 3D: A Tecnologia Do MometoThiago Neves PaivaNo ratings yet
- Lavadora Continental L1050SMDocument112 pagesLavadora Continental L1050SMfmora1200100% (1)
- Aula 1 Introdução A Cadeia de SuprimentosDocument29 pagesAula 1 Introdução A Cadeia de SuprimentosCarlos ferreiraNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Manual Do Inversor Mitisubishi-Frd700 PDFDocument32 pagesManual Do Inversor Mitisubishi-Frd700 PDFwpaes19658151No ratings yet
- Relatorio Carro PropagandaDocument9 pagesRelatorio Carro PropagandaIuri ChavezNo ratings yet
- Relatorio de Estagio 1Document26 pagesRelatorio de Estagio 1Diego SantosNo ratings yet
- Projeto FinalDocument18 pagesProjeto Finaljorge jorginhoNo ratings yet
- Monitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No PythonFrom EverandMonitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No PythonNo ratings yet
- Monitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No Visual BasicFrom EverandMonitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No Visual BasicNo ratings yet
- Desenvolvendo Um Datalogger Para Medição De Concentração De Co Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Co Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medição De Concentração De Co2 Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Co2 Com ArduinoNo ratings yet
- Monitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No Visual C#From EverandMonitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No Visual C#No ratings yet
- Desenvolvendo Um Datalogger Para Medir Higrômetro Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Higrômetro Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Fluxo De Massa Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Fluxo De Massa Com Esp8266 Programado No ArduinoNo ratings yet
- Monitorar Temperatura - ArduinoDocument13 pagesMonitorar Temperatura - ArduinoEduardo JúnioNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Etanol Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Etanol Com Esp8266 Programado No ArduinoNo ratings yet
- 2) Artigo - ArduinoDocument6 pages2) Artigo - ArduinoRenan FontelesNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Radiação Uv Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Radiação Uv Com ArduinoNo ratings yet
- Lógica FuzzyDocument39 pagesLógica FuzzyJulio Godoy50% (2)
- Introdução Ao Arduino - 07.11.2023Document15 pagesIntrodução Ao Arduino - 07.11.2023Douglas ChananNo ratings yet
- Desenvolvendo Um Datalogger Para Gaussímetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Gaussímetro Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Wattímetro Dc Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Wattímetro Dc Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Voltímetro Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Voltímetro Com Esp8266 Programado No ArduinoNo ratings yet
- Utilização Da Tecnologia Iot para Construção de Um Protótipo de Sistema de Segurança Baseado Na Fechadura de ImpDocument7 pagesUtilização Da Tecnologia Iot para Construção de Um Protótipo de Sistema de Segurança Baseado Na Fechadura de ImpSamuel Sherman MinariniNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Co2 Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Co2 Com Esp8266 Programado No ArduinoNo ratings yet
- 45 92 1 SMDocument16 pages45 92 1 SMeduardohcmendesNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Ohmímetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Ohmímetro Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Barômetro Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Barômetro Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Fluxo De Massa Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Fluxo De Massa Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Amperímetro Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Amperímetro Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medição De Concentração De Amônia Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Amônia Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Dinamômetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Dinamômetro Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Radiação Uv Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Radiação Uv Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medição De Concentração De H2 Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medição De Concentração De H2 Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Um Luxímetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Um Luxímetro Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Ph Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Ph Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Volume De Fluido Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Volume De Fluido Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Concentração De H2 Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Concentração De H2 Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Um Decibelímetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Um Decibelímetro Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Energia Em Kwh Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Energia Em Kwh Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Célula De Carga Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Célula De Carga Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Co Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Co Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Decibelímetro Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Decibelímetro Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medição De Concentração De Benzeno Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Benzeno Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Amperímetro Trifásico Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Amperímetro Trifásico Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Odômetro Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Odômetro Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Célula De Carga Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Célula De Carga Com Esp8266 Programado No ArduinoNo ratings yet
- Iot Start - Algoritmos E Programação C/c++ E Arduino - 1 - ConceitosFrom EverandIot Start - Algoritmos E Programação C/c++ E Arduino - 1 - ConceitosNo ratings yet
- Desenvolvendo Um Datalogger Para Medição De Concentração De Etanol Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Etanol Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Ozônio Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Ozônio Com Esp8266 Programado No ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Ozônio Com ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Ozônio Com ArduinoNo ratings yet
- Desenvolvendo Um Datalogger Para Medir Dinamômetro Com Esp8266 Programado No ArduinoFrom EverandDesenvolvendo Um Datalogger Para Medir Dinamômetro Com Esp8266 Programado No ArduinoNo ratings yet
- Arduino Projeto 07 DesafiosDocument5 pagesArduino Projeto 07 DesafiosGustavo Henrique BarrosoNo ratings yet
- TCC 2014Document10 pagesTCC 2014Gustavo Henrique BarrosoNo ratings yet
- Bacic PDFDocument20 pagesBacic PDFGustavo Henrique BarrosoNo ratings yet
- Caminhão BetoneiraDocument38 pagesCaminhão Betoneiraracini454100% (1)
- Arduino Projeto 04 DesafiosDocument6 pagesArduino Projeto 04 DesafiosGustavo Henrique BarrosoNo ratings yet
- TCC 2014Document10 pagesTCC 2014Gustavo Henrique BarrosoNo ratings yet
- 3.1. Automação de Sistema e RobóticaDocument2 pages3.1. Automação de Sistema e RobóticaGustavo Henrique BarrosoNo ratings yet
- Livro CNC Part11Document20 pagesLivro CNC Part11Gustavo Henrique BarrosoNo ratings yet
- Livro CNC Part9Document20 pagesLivro CNC Part9Gustavo Henrique BarrosoNo ratings yet
- Mecanica Semana 06Document2 pagesMecanica Semana 06Gustavo Henrique BarrosoNo ratings yet
- Livro CNC Part10Document20 pagesLivro CNC Part10Gustavo Henrique BarrosoNo ratings yet
- Livro CNC Part12 PDFDocument20 pagesLivro CNC Part12 PDFGustavo Henrique BarrosoNo ratings yet
- Livro CNC Part8Document20 pagesLivro CNC Part8Gustavo Henrique BarrosoNo ratings yet
- Atividade - Economia - Semana 4Document5 pagesAtividade - Economia - Semana 4Gustavo Henrique BarrosoNo ratings yet
- Livro CNC Part6Document20 pagesLivro CNC Part6Gustavo Henrique BarrosoNo ratings yet
- Livro CNC Part2Document20 pagesLivro CNC Part2Gustavo Henrique BarrosoNo ratings yet
- Quimica 4Document2 pagesQuimica 4Gustavo Henrique BarrosoNo ratings yet
- Descritivo Dos ExemplosDocument1 pageDescritivo Dos ExemplosGustavo Henrique BarrosoNo ratings yet
- Livro CNC Part7Document20 pagesLivro CNC Part7Gustavo Henrique BarrosoNo ratings yet
- CLP Prova Edu-Brasil - 2017Document1 pageCLP Prova Edu-Brasil - 2017Gustavo Henrique BarrosoNo ratings yet
- Com3101 Usb2.0Document150 pagesCom3101 Usb2.0Gustavo Henrique BarrosoNo ratings yet
- Atividade - Métodos Numéricos - Semana 3Document5 pagesAtividade - Métodos Numéricos - Semana 3Gustavo Henrique BarrosoNo ratings yet
- Criar Um LoaderDocument13 pagesCriar Um LoaderAirton Gomes de LimaNo ratings yet
- Programacao AssemblerDocument28 pagesProgramacao AssemblerAlisson AraujoNo ratings yet
- Tese Paulo R Loyolla Kuhlmann PDFDocument184 pagesTese Paulo R Loyolla Kuhlmann PDFGustavo Henrique BarrosoNo ratings yet
- Analise de Circuitos Prova - 2017Document2 pagesAnalise de Circuitos Prova - 2017Gustavo Henrique BarrosoNo ratings yet
- 03 Asm CDocument19 pages03 Asm CMarcos Maciel GodinhoNo ratings yet
- Analise de CorrelatosDocument13 pagesAnalise de CorrelatosGeovany SilvaNo ratings yet
- Catalogo Monoforte PDFDocument2 pagesCatalogo Monoforte PDFmand42No ratings yet
- BZM Disjuntores em Caixa Moldada PDFDocument9 pagesBZM Disjuntores em Caixa Moldada PDFdsmorenoNo ratings yet
- Schneider Manual Instruções Geral 01-2018 WebDocument68 pagesSchneider Manual Instruções Geral 01-2018 WebEverton AlvesNo ratings yet
- Pilares de MadeiraDocument8 pagesPilares de MadeiravavastaatsNo ratings yet
- DF80XDocument2 pagesDF80XV_Vic0% (1)
- Excavadora y RetroexcavadoraDocument6 pagesExcavadora y RetroexcavadoraLuisFerNandoNo ratings yet
- ManualSamurai97 PDFDocument114 pagesManualSamurai97 PDFRodrigo DiazNo ratings yet
- Catalogo IgeatelDocument24 pagesCatalogo IgeatelGilberto GonçalvesNo ratings yet
- Brise 150 - 275 PDFDocument2 pagesBrise 150 - 275 PDFCarlos MinguiniNo ratings yet
- Relatorio de Termodinamica I CompressoresDocument9 pagesRelatorio de Termodinamica I CompressoresVictor NogueiraNo ratings yet
- Tipos de ParedesDocument18 pagesTipos de ParedesFernando Guimarães FilhoNo ratings yet
- Normas PCHDocument3 pagesNormas PCHThiago Rodrigo Oliveira SantosNo ratings yet
- Carlos Brites-SEMITEC (Norma)Document14 pagesCarlos Brites-SEMITEC (Norma)Tiago Calazans TorresNo ratings yet
- Catálogo de Mangueiras IndustriaisDocument60 pagesCatálogo de Mangueiras IndustriaisAlexandro SantosNo ratings yet
- Mini Cat Truck 2017 PortuguesDocument16 pagesMini Cat Truck 2017 PortuguesEmerson GomesNo ratings yet
- Tratamento de Resíduos SólidosDocument2 pagesTratamento de Resíduos SólidosPatrique Kells IgnaciNo ratings yet
- Esteira Seletora de ReciclaveisDocument47 pagesEsteira Seletora de ReciclaveisPatricia DinizNo ratings yet