You might also like
- Project 1 HFSS Tutorial Rectangular WGDocument23 pagesProject 1 HFSS Tutorial Rectangular WGLive To LoveNo ratings yet
- 8-01. Review of Linear DSPDocument6 pages8-01. Review of Linear DSPSúlivan MedeirosNo ratings yet
- Orientation For Lab Reports PDFDocument2 pagesOrientation For Lab Reports PDFSúlivan MedeirosNo ratings yet
- HFSS Vector Field CalculationsDocument27 pagesHFSS Vector Field CalculationsChen WuNo ratings yet
- Maverick1977PrintedCircuits PDFDocument1 pageMaverick1977PrintedCircuits PDFSúlivan MedeirosNo ratings yet
- AC Drives Control ABBDocument316 pagesAC Drives Control ABBbryan_robinsonuscNo ratings yet
- Orientation For Lab Reports PDFDocument2 pagesOrientation For Lab Reports PDFSúlivan MedeirosNo ratings yet
- Orientation For Lab Reports PDFDocument2 pagesOrientation For Lab Reports PDFSúlivan MedeirosNo ratings yet
- 1977 Main MavDocument2 pages1977 Main MavSúlivan MedeirosNo ratings yet
- Candide by Voltaire: Súlivan Medeiros ECE900A - R&D Concept To Communication 1 - Fall 2017 Professor: Andrew KunDocument12 pagesCandide by Voltaire: Súlivan Medeiros ECE900A - R&D Concept To Communication 1 - Fall 2017 Professor: Andrew KunSúlivan MedeirosNo ratings yet
- Maverick 1977 Printed CircuitsDocument1 pageMaverick 1977 Printed CircuitsSúlivan MedeirosNo ratings yet
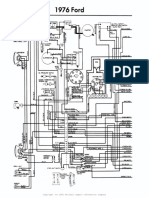
- 1976 Main MavDocument2 pages1976 Main MavSúlivan MedeirosNo ratings yet
- Hfss PDFDocument23 pagesHfss PDFRavindra KumarNo ratings yet
- Doing Research in Power ElectronicsDocument12 pagesDoing Research in Power ElectronicsSúlivan MedeirosNo ratings yet
- SMD CatalogDocument80 pagesSMD Catalogpbradaric91% (11)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Uploads File Articles Jadavpur University - MTCTDocument2 pagesUploads File Articles Jadavpur University - MTCTRam Kumar Basak0% (1)
- Unit 1 (DMW)Document53 pagesUnit 1 (DMW)ManishaNo ratings yet
- Jordan Vneumann THMDocument3 pagesJordan Vneumann THMJamilu Adamu MusaNo ratings yet
- PaperpublishedDocument10 pagesPaperpublishedSamsam RaufNo ratings yet
- ECSE 534 Project (Final Phase) A First-Order, Single-bit, Lowpass ΔΣ A/D Converter: System and Circuit Level ImplementationDocument13 pagesECSE 534 Project (Final Phase) A First-Order, Single-bit, Lowpass ΔΣ A/D Converter: System and Circuit Level ImplementationRafid KhanNo ratings yet
- 6 Differential CalculusDocument35 pages6 Differential CalculusPankaj SahuNo ratings yet
- Motion Graphs and SUVAT EQ MSDocument50 pagesMotion Graphs and SUVAT EQ MSAvneet BajwaNo ratings yet
- Amcat Question QUANTITATIVE ABILITY Papers-2. - FresherLine - Jobs, Recruitment, Fresher - FresherlineDocument2 pagesAmcat Question QUANTITATIVE ABILITY Papers-2. - FresherLine - Jobs, Recruitment, Fresher - FresherlinePrashant Kumar TiwariNo ratings yet
- Ozdekan Seismic IsolatorDocument20 pagesOzdekan Seismic Isolatorali babaNo ratings yet
- Flash CheguideDocument16 pagesFlash Cheguidesok_splNo ratings yet
- Underwater Communications: Milica Stojanovic Massachusetts Institute of Technology Millitsa@mit - EduDocument16 pagesUnderwater Communications: Milica Stojanovic Massachusetts Institute of Technology Millitsa@mit - EduMansi JainNo ratings yet
- Numerology Calculator and Numerology Chart Explained - How To Easily DIY For FreeDocument9 pagesNumerology Calculator and Numerology Chart Explained - How To Easily DIY For FreeBouck DavidNo ratings yet
- CHP 3 Part OneDocument57 pagesCHP 3 Part OneMegha GuptaNo ratings yet
- Polynomial ExpressionsDocument39 pagesPolynomial ExpressionsZs TangNo ratings yet
- N-Bit Colour FrameDocument30 pagesN-Bit Colour Framevikram vikramNo ratings yet
- Data Structures Through C 1Document209 pagesData Structures Through C 1Abhay DabhadeNo ratings yet
- Calculating Tank VolumeDocument12 pagesCalculating Tank VolumeJoka Joka100% (1)
- INTRO TO ECE - HW Assignment 2:, I, I, I V, V, V, V, P P PDocument8 pagesINTRO TO ECE - HW Assignment 2:, I, I, I V, V, V, V, P P PVienNgocQuangNo ratings yet
- Superelevation Calculator: Superelevation Data Dialog BoxDocument2 pagesSuperelevation Calculator: Superelevation Data Dialog Boxhussnainali aliNo ratings yet
- Alysia Citta Paramitha - Tugas 6 Dan 7Document7 pagesAlysia Citta Paramitha - Tugas 6 Dan 7Moe ChannelNo ratings yet
- HistoriDel Control StuartBennetDocument9 pagesHistoriDel Control StuartBennetERICA JOHANA FIGUEROA DURANGONo ratings yet
- Mid Term 1b F16Document1 pageMid Term 1b F16Kartik PatelNo ratings yet
- APSDS 5.0. Wardle, Rodway 2010Document11 pagesAPSDS 5.0. Wardle, Rodway 2010Tim LinNo ratings yet
- PTFT and Loss PDF 20.06.2017Document25 pagesPTFT and Loss PDF 20.06.2017AnkitNo ratings yet
- Lesson Plan: Instructor: Date Topic: Grade Level: Subject ObjectivesDocument5 pagesLesson Plan: Instructor: Date Topic: Grade Level: Subject Objectivesapi-340265930No ratings yet
- QM Test BankDocument57 pagesQM Test BankIsmadth2918388No ratings yet
- Es SyllabusDocument56 pagesEs SyllabusmanoshamnairNo ratings yet
- Programming For Engineers Lecture 09Document46 pagesProgramming For Engineers Lecture 09Malik AdnanNo ratings yet
- Ibps Numerical Ability Sample PaperDocument5 pagesIbps Numerical Ability Sample PaperPriyaJindalNo ratings yet
- Starcam Manual PDFDocument144 pagesStarcam Manual PDFuripssNo ratings yet