You might also like
- B0400fa L PDFDocument472 pagesB0400fa L PDFRicardo CalmonNo ratings yet
- Comen C50 Patient Monitor Service ManuelDocument58 pagesComen C50 Patient Monitor Service Manuelsalim annakNo ratings yet
- MM6 User Guide For V194 Firmware Doc Rev 1.08Document273 pagesMM6 User Guide For V194 Firmware Doc Rev 1.08Chiranjeevi Tadi100% (2)
- TIAPortalOpennessenUS en USDocument278 pagesTIAPortalOpennessenUS en USrmorenodx4587No ratings yet
- Beko Ev 6800Document26 pagesBeko Ev 6800RomanBalashevichNo ratings yet
- Electric Motor Maintenance and Troubleshooting, 2nd EditionFrom EverandElectric Motor Maintenance and Troubleshooting, 2nd EditionRating: 3 out of 5 stars3/5 (2)
- CAPDIS M4 V8 eDocument2 pagesCAPDIS M4 V8 emadamada1No ratings yet
- Install Manual for Automatic Identification SystemDocument102 pagesInstall Manual for Automatic Identification SystemMoises Bermudez100% (2)
- Fans catalogue: Axial fans with EC motorsDocument136 pagesFans catalogue: Axial fans with EC motorsMiodrag KesicNo ratings yet
- A Guide - Motor Starter Selection & MaintenanceDocument65 pagesA Guide - Motor Starter Selection & MaintenanceBilal AhmadNo ratings yet
- Motor BookDocument252 pagesMotor BookTasawwur Tahir100% (2)
- P34x EN AD G54Document48 pagesP34x EN AD G54Adip Chy100% (1)
- Service Failure Analysis of D C Motor Co PDFDocument6 pagesService Failure Analysis of D C Motor Co PDFOmar QatawnehNo ratings yet
- Chapt.-3 - Testing of Rotating AC Machines - Part 2Document48 pagesChapt.-3 - Testing of Rotating AC Machines - Part 2Shubham PassiNo ratings yet
- Design of VFD Drive For AC MotorDocument8 pagesDesign of VFD Drive For AC MotorralphholingsheadNo ratings yet
- Electrical Design 101 PDFDocument104 pagesElectrical Design 101 PDFjungatbuntonNo ratings yet
- Basics For Practical Operation - Motor ProtectionDocument68 pagesBasics For Practical Operation - Motor ProtectionSumit VermaNo ratings yet
- Fault Finding GuideDocument3 pagesFault Finding Guiderajesh_patil982002No ratings yet
- Motor Controls Troubleshooting of Electric MotorsDocument34 pagesMotor Controls Troubleshooting of Electric MotorsAdil RezoukNo ratings yet
- Condition Monitoring Using Thermography For Preventive And Predictive MaintenanceDocument17 pagesCondition Monitoring Using Thermography For Preventive And Predictive MaintenanceShubham SanyalNo ratings yet
- 110 Electrical Skills StoryBoardDocument11 pages110 Electrical Skills StoryBoardshyamNo ratings yet
- Selection and Maintenance of AC MotorDocument29 pagesSelection and Maintenance of AC MotorPrakash KumarNo ratings yet
- Three-Phase Motor - TroubleshootingDocument3 pagesThree-Phase Motor - TroubleshootingEbi Eldho50% (2)
- Your Source for the Process Control LoopDocument59 pagesYour Source for the Process Control LoopGigi SalesNo ratings yet
- Surge and Lightning ArrestersDocument10 pagesSurge and Lightning Arresterssalemg82No ratings yet
- Industrial Electrical Maintenance Training CoursesDocument9 pagesIndustrial Electrical Maintenance Training CoursesBuddy EkoNo ratings yet
- Induction Motors - Modelling and ControlDocument558 pagesInduction Motors - Modelling and ControlCesar CarácterNo ratings yet
- Stancor OilMinder BrochureDocument2 pagesStancor OilMinder BrochureusarelaNo ratings yet
- Relay Circuit PDFDocument8 pagesRelay Circuit PDFGuru Mishra100% (1)
- Vidyaa Vikas College of Engineering and Technology: Course MaterialDocument89 pagesVidyaa Vikas College of Engineering and Technology: Course MaterialSebin KvNo ratings yet
- The Art of Transformer Maintenance, Inspection and Repair (Recommended Practices)Document5 pagesThe Art of Transformer Maintenance, Inspection and Repair (Recommended Practices)Abdul Mohid SheikhNo ratings yet
- FUNDAMENTAL OF ELECTRIC MOTOR, CONTROL AND MAINTENANCE-sem 4Document179 pagesFUNDAMENTAL OF ELECTRIC MOTOR, CONTROL AND MAINTENANCE-sem 4Nora ElyanaNo ratings yet
- Motor Troubleshooting and MaintenanceDocument27 pagesMotor Troubleshooting and MaintenanceparabitoNo ratings yet
- Preventive Maintenance and Reliability of LV Overcurrent Protective DevicesDocument7 pagesPreventive Maintenance and Reliability of LV Overcurrent Protective DevicesHamayoun MurtazaNo ratings yet
- Lessons in Electric Circuit1Document51 pagesLessons in Electric Circuit1jun deeNo ratings yet
- Unit 35 Portfolio Answer 2018Document22 pagesUnit 35 Portfolio Answer 2018Hatem HusseinNo ratings yet
- PAT TestDocument28 pagesPAT Testmanzoor hassanNo ratings yet
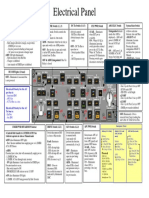
- Electrical Panel - Cheat Sheet PDFDocument1 pageElectrical Panel - Cheat Sheet PDFbnolasco100% (1)
- Motor Installation and Maintenance ManualDocument23 pagesMotor Installation and Maintenance ManualVenkat CherukuriNo ratings yet
- Electrician: Syllabus of Semester System For The Trade ofDocument27 pagesElectrician: Syllabus of Semester System For The Trade ofTusharNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitDocument2 pagesPractical Troubleshooting of Electrical Equipment and Control Circuitapi-374299350% (2)
- ATPOL II - FULL Pattern Recognition ManualDocument44 pagesATPOL II - FULL Pattern Recognition ManualDaniel AguilarNo ratings yet
- Plant Engineering 2006sepDocument5 pagesPlant Engineering 2006sepRamco33No ratings yet
- Earthing of High Voltage Electrical Apparatus For The Protection of PersonnelDocument56 pagesEarthing of High Voltage Electrical Apparatus For The Protection of PersonnelDavoNo ratings yet
- Basic Motor Control: 02-03 Agustus 2004 Kursus Motor Protection For Industry 1Document83 pagesBasic Motor Control: 02-03 Agustus 2004 Kursus Motor Protection For Industry 1Aries dNo ratings yet
- VipDocument8 pagesVipManiVinoNo ratings yet
- Troubleshooting Control Circuits and VFDsDocument76 pagesTroubleshooting Control Circuits and VFDsavandetq15100% (2)
- Vibration Monitoring For Fault Motors Diagnosis PDFDocument8 pagesVibration Monitoring For Fault Motors Diagnosis PDFuuur35100% (1)
- Medium-Voltage Switchgear and Circuit BreakersDocument17 pagesMedium-Voltage Switchgear and Circuit BreakersJeremy Orajay0% (1)
- MCDocument300 pagesMCdiegobenitezNo ratings yet
- Induction Motor Rotor BarsDocument4 pagesInduction Motor Rotor Barslupillorivera9981100% (1)
- Arc Flash Analysis PDFDocument88 pagesArc Flash Analysis PDFEdwin LoquinaNo ratings yet
- PCS-9830A - X - Instruction Manual - EN - Domestic General - X - R1.00Document87 pagesPCS-9830A - X - Instruction Manual - EN - Domestic General - X - R1.00Ricchie Gotama SihiteNo ratings yet
- Electrical TroubleshootingDocument9 pagesElectrical TroubleshootingJayJay40% (5)
- Maintenance and Troubleshooting of Induction MotorDocument20 pagesMaintenance and Troubleshooting of Induction MotorMiraj100% (1)
- Residual Current Devices: Selection, Operation, and TestingFrom EverandResidual Current Devices: Selection, Operation, and TestingNo ratings yet
- Industrial Electronics for Engineers, Chemists, and Technicians: With Optional Lab ExperimentsFrom EverandIndustrial Electronics for Engineers, Chemists, and Technicians: With Optional Lab ExperimentsNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Advances in High Voltage Insulation and Arc Interruption in SF6 and VacuumFrom EverandAdvances in High Voltage Insulation and Arc Interruption in SF6 and VacuumNo ratings yet
- Fundamentals of Instrumentation and MeasurementFrom EverandFundamentals of Instrumentation and MeasurementRating: 5 out of 5 stars5/5 (1)
- Diagnosis Master Technician - Fundamentals of Troubleshooting Case Examples "Attachment B-1"Document5 pagesDiagnosis Master Technician - Fundamentals of Troubleshooting Case Examples "Attachment B-1"ssendyosseNo ratings yet
- 6 1. TroubleshootingDocument70 pages6 1. Troubleshootingjesus mamani mezaNo ratings yet
- Hyundai r510lc 7 TroubleshootingDocument60 pagesHyundai r510lc 7 Troubleshootingmohammed barghothiNo ratings yet
- Hyundai r230lm India Smart TroubleshootingDocument55 pagesHyundai r230lm India Smart TroubleshootingraghavNo ratings yet
- Nse Options Strategies Explanation With ExamplesDocument60 pagesNse Options Strategies Explanation With ExamplesVatsal ShahNo ratings yet
- Bank Nifty Option Strategy For November Series - 09112020-1604902911Document2 pagesBank Nifty Option Strategy For November Series - 09112020-1604902911rpshvjuNo ratings yet
- Motor protection relay user manualDocument13 pagesMotor protection relay user manualrpshvjuNo ratings yet
- Purchase Requistion: Sagardighi Thermal Power ProjectDocument3 pagesPurchase Requistion: Sagardighi Thermal Power ProjectrpshvjuNo ratings yet
- Option Trading StrategiesDocument0 pagesOption Trading StrategiesGarvit Garg100% (1)
- Welcome To: Cooling Water Treatment in Power Plants Recent Trends & Case StudyDocument17 pagesWelcome To: Cooling Water Treatment in Power Plants Recent Trends & Case StudyrpshvjuNo ratings yet
- Option StrategyDocument59 pagesOption StrategyTarkeshwar MahatoNo ratings yet
- NISMDocument18 pagesNISMAbhinav PratapNo ratings yet
- Strategy Guide: Bull Call SpreadDocument14 pagesStrategy Guide: Bull Call SpreadworkNo ratings yet
- Cooking TipsDocument1 pageCooking TipsrpshvjuNo ratings yet
- Budget Fin Year Department - Em-OphDocument10 pagesBudget Fin Year Department - Em-OphrpshvjuNo ratings yet
- Agency Blacklisting RulesDocument10 pagesAgency Blacklisting Rulesrpshvju100% (1)
- Intake To Filter Water SystemDocument3 pagesIntake To Filter Water SystemrpshvjuNo ratings yet
- ZnO Gapless Lightning Arrester or Surge ArresterDocument8 pagesZnO Gapless Lightning Arrester or Surge ArresterrpshvjuNo ratings yet
- Post No 6 - How To Move Your Website From Localhost To Online ServerDocument7 pagesPost No 6 - How To Move Your Website From Localhost To Online ServerrpshvjuNo ratings yet
- Website Details Password and Id's: Website Address: 1. Domain Registrar and Hosting Company: HostingrajaDocument1 pageWebsite Details Password and Id's: Website Address: 1. Domain Registrar and Hosting Company: HostingrajarpshvjuNo ratings yet
- EXIDEDocument27 pagesEXIDErpshvjuNo ratings yet
- Chapter PDFDocument9 pagesChapter PDFVenkatramana Reddy KNo ratings yet
- Total power failure restoration and cold start up proceduresDocument8 pagesTotal power failure restoration and cold start up proceduresrpshvjuNo ratings yet
- RHH and LTSH links overviewDocument4 pagesRHH and LTSH links overviewrpshvjuNo ratings yet
- Raw water 6.6Kv switchgear and DM Plant 415V MCC single line diagramsDocument2 pagesRaw water 6.6Kv switchgear and DM Plant 415V MCC single line diagramsrpshvjuNo ratings yet
- PLC Unity Pro Software Quantum Hot StandbyDocument28 pagesPLC Unity Pro Software Quantum Hot StandbyrpshvjuNo ratings yet
- Common HmiDocument7 pagesCommon HmirpshvjuNo ratings yet
- Resource 2: Three-Phase AC MachinesDocument11 pagesResource 2: Three-Phase AC MachinesrpshvjuNo ratings yet
- Spam Relay Setting Guide PDFDocument28 pagesSpam Relay Setting Guide PDFrpshvju100% (1)
- Adhikary Plant CycleDocument19 pagesAdhikary Plant CyclerpshvjuNo ratings yet
- Adhikary Plant CycleDocument19 pagesAdhikary Plant CyclerpshvjuNo ratings yet
- Intake Switchgear Layout Phase 2Document1 pageIntake Switchgear Layout Phase 2rpshvjuNo ratings yet
- Esld R07 ..Document1 pageEsld R07 ..rpshvjuNo ratings yet
- Final Draft 0Document47 pagesFinal Draft 0Yosef KirosNo ratings yet
- Unmatched Protection Safety Light Curtain PDFDocument36 pagesUnmatched Protection Safety Light Curtain PDFiijnnnllkkjj100% (1)
- DSE91xx DSE92xx DSE94xx Series Operators ManualDocument77 pagesDSE91xx DSE92xx DSE94xx Series Operators ManualGerman E.No ratings yet
- SSD 2119Document95 pagesSSD 2119Leonardo1498100% (1)
- Sailor User ManualDocument157 pagesSailor User ManualEdwin NyangeNo ratings yet
- MODULE in Consumer ElectronicsDocument129 pagesMODULE in Consumer ElectronicsNyepni NelmiNo ratings yet
- VW - tb.00-06-12 Radio Checking Replacing OXDocument4 pagesVW - tb.00-06-12 Radio Checking Replacing OXRicardo AssunçãoNo ratings yet
- Analysis and Construction of Push Pull Converter - Noor Rulmuna Bt. Mohd Sarmin - TK7872.C8.N66 2006Document27 pagesAnalysis and Construction of Push Pull Converter - Noor Rulmuna Bt. Mohd Sarmin - TK7872.C8.N66 2006Rizwan FaizNo ratings yet
- The Voltech Handbook of Power SuppliesDocument86 pagesThe Voltech Handbook of Power SuppliesDaniel PopaNo ratings yet
- KION / KION-i Anesthesia Workstation: Service ManualDocument207 pagesKION / KION-i Anesthesia Workstation: Service ManualAyaovi JorlauNo ratings yet
- Produktblatt Unisort 10 HD 25 HD 40 HD 63 EnglischDocument2 pagesProduktblatt Unisort 10 HD 25 HD 40 HD 63 EnglischCenk-Brawl StarsNo ratings yet
- Yaskawa Siemens CNC Series: Maintenance Manual Serviceman HandbookDocument373 pagesYaskawa Siemens CNC Series: Maintenance Manual Serviceman HandbookbelonaNo ratings yet
- Electromagnetic Compatibility (EMC) - : Part 6-2: Generic Standards - Immunity For Industrial EnvironmentsDocument20 pagesElectromagnetic Compatibility (EMC) - : Part 6-2: Generic Standards - Immunity For Industrial EnvironmentsCORAL ALONSONo ratings yet
- Relé de Segurança Wieland Sno 2005-17 24vdcDocument5 pagesRelé de Segurança Wieland Sno 2005-17 24vdcMarcelho CaetanoNo ratings yet
- Manual Tverter Inversor N3 - Operating - Manual PDFDocument115 pagesManual Tverter Inversor N3 - Operating - Manual PDFEduardo Villela CarvalhoNo ratings yet
- LG IEC62257-9-5 UpdateMemo Finalv2Document8 pagesLG IEC62257-9-5 UpdateMemo Finalv2Max QuintanillaNo ratings yet
- Zen-O Lite - User - Manual - en - de - FR - NL - Es - PT - It - SVDocument296 pagesZen-O Lite - User - Manual - en - de - FR - NL - Es - PT - It - SVAna LauraNo ratings yet
- Interface Module Adapter S7 300, S7 400, S7 1500Document23 pagesInterface Module Adapter S7 300, S7 400, S7 1500SyariefNo ratings yet
- MSC Physics Sem-3 PaperDocument29 pagesMSC Physics Sem-3 PaperschoolhelpmentorNo ratings yet
- Himel Variable Speed DrivesDocument17 pagesHimel Variable Speed DriveszibrahimiNo ratings yet
- DeepSea 8620 Operators ManualDocument122 pagesDeepSea 8620 Operators ManualMTU65067% (3)
- Yamaha cp33 SMDocument81 pagesYamaha cp33 SMJosé Ramón Abella AldeguerNo ratings yet
- Control Ningbo NBSL nsfc01 01 Control System 4swDocument10 pagesControl Ningbo NBSL nsfc01 01 Control System 4swShadi MattarNo ratings yet
- Quick Manual v1.2: Advanced OBDII TrackerDocument14 pagesQuick Manual v1.2: Advanced OBDII TrackeranditowillyNo ratings yet
- Gmv5 Fault CodesDocument38 pagesGmv5 Fault CodesLaurentiu Lapusescu100% (1)