Professional Documents
Culture Documents
7 Engranajes Geometria
Uploaded by
Papa CebolletaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
7 Engranajes Geometria
Uploaded by
Papa CebolletaCopyright:
Available Formats
MECANISMOS Engranajes. Consideraciones geométricas.
TEMA: ENGRANAJES: CONSIDERACIONES GEOMETRICAS.
1- INTRODUCCION.
2- RUEDAS DE FRICCION.
2.1- Cilindros de fricción.
2.2- Conos de fricción.
2.3- Hiperboloides de fricción.
2.4- Conclusiones.
3- ENGRANAJES.
3.1- Relación de transmisión.
3.1.1- Introducción.
3.1.2- Condición para relación de transmisión constante: Ley de engrane.
3.2- Perfiles conjugados.
3.2.1- Evolvente de círculo.
3.2.2- Dientes de perfil de evolvente.
3.3- Términos y definiciones.
Engranajes. Consideraciones geométricas. Pag-1
MECANISMOS Engranajes. Consideraciones geométricas.
1.-INTRODUCCION
Como ya se comentó en el tema anterior, este capítulo se dedicará al estudio de los engranajes.
Un engranaje está formado por dos ruedas dentadas que se unen de forma cinemática entre sí
por medio de un par superior.
A modo de introducción, y antes de estudiar la geometría de los engranajes y su cinemática, se
aplicarán las nociones básicas del contacto rodante al estudio de las ruedas de fricción, por entender
que una clara compresión de estos conceptos es fundamental para una buena asimilación de la teoría
de engranajes. Posteriormente se expondrá el estudio de los engranajes, de su geometría, de su
nomenclatura, de las relaciones existentes entre los diferentes parámetros geométricos y de los
diferentes tipos existentes de engranajes.
Es importante dentro del estudio de la cinemática y dinámica de máquinas conocer bien los
engranajes, sus diferentes tipos, y su cinemática, pues constituyen uno de los elementos más
ampliamente utilizados en las máquinas, desde un reloj de pulsera hasta un reactor, pasando por
taladros de mano, automóviles, máquinas herramientas, puentes grúa etc.., todos estos productos
utilizan engranajes, de un tipo u otro, dentro de las cadenas cinemáticas de sus mecanismos.
Engranajes. Consideraciones geométricas. Pag-2
MECANISMOS Engranajes. Consideraciones geométricas.
2- RUEDAS DE FRICCION.
2.1- Cilindros de fricción.
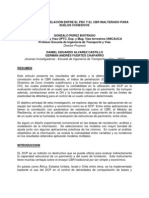
En la figura 1 se muestran dos pares de rodillos de fricción. Estos mecanismos sólo pueden
transmitir movimiento de un cuerpo a otro si existe suficiente rozamiento en las superficies de
contacto; por este motivo se denominan rodillos de fricción.
P=P
VP2 =VP3 O2 P=P R2 VP2 =VP3 2 3
2 3
C R2
R3 R3
O2 2 C
O3 O3
3
3
Fig-1. Ruedas cilíndricas de fricción.
Puesto que en cualquiera de los casos las velocidades del punto P para cada uno de los cilindros
son iguales:
r r
v P2 = v P3
y puesto que:
v P2 = ω 2 ⋅ R2 y v P3 = ω 3 ⋅ R3
se obtiene que:
ω 2 ⋅ R2 = ω 3 ⋅ R3
de donde:
ω 2 R3
= (1)
ω 3 R2
Engranajes. Consideraciones geométricas. Pag-3
MECANISMOS Engranajes. Consideraciones geométricas.
Para el par de rodillos que realizan el contacto en su superficie exterior:
R2 + R3 = C ⇒ R3 = C − R2
que sustituido en (1):
ω 2 C − R2 C
= = −1
ω3 R2 R2
de donde:
C
R2 =
ω2
+1
ω3
Expresión que nos permite calcular el radio de uno de los rodillos conocida la distancia entre
ω2
centros y la relación de transmisión i = .
ω 3
En el caso en que un cilindro realice el contacto por la parte exterior y otro por la parte interior,
girarán en el mismo sentido y además, según se deduce de la figura 1:
R3 − R2 = C ⇒ R3 = C + R2
que sustituido en (1):
ω 2 C + R2 C
= = +1
ω3 R2 R2
de donde:
C
R2 =
ω2
−1
ω3
2.2- Conos de fricción.
Los cilindros de fricción se pueden utilizar para transmitir movimiento entre ejes paralelos
situados a una distancia C. Si los ejes se cortan, pueden utilizarse los conos de fricción.
Engranajes. Consideraciones geométricas. Pag-4
MECANISMOS Engranajes. Consideraciones geométricas.
En el caso en que cada eje gire en un sentido se utilizarán conos de fricción externos como los
mostrados en la figura 2:
O C
R3
P δ3
B
Σ
2 R2
δ2
Fig-2. Conos de fricción exteriores.
Puesto que la velocidad del punto P es la misma tanto para el perteneciente al cono 3 como para
el perteneciente al cono 2: r r
v P3 = v P2
ω 3 ⋅ R3 = ω 2 ⋅ R2
ω 3 R2
=
ω 2 R3
Esta relación debe cumplirse para todos los puntos en contacto situados a lo largo de la línea
OP.
En el diseño de máquinas, el problema más habitual es calcular los ángulos de cada uno de los
conos una vez conocida la relación de transmisión y el ángulo que forman los ejes.
Puesto que los ángulos de los conos pueden ser expresados como:
R2
senδ 2 =
OP
R
senδ 3 = 3
OP
Dividiendo ambos términos entre sí:
Engranajes. Consideraciones geométricas. Pag-5
MECANISMOS Engranajes. Consideraciones geométricas.
senδ 2 R2 ω 3
= =
senδ 3 R3 ω 2
expresando δ 3 = Σ − δ 2 :
senΣ ⋅ cosδ 2 − cosΣ ⋅ senδ 2 ω2
=
senδ 2 ω3
de donde:
senΣ ω
− cosΣ = 2
tgδ 2 ω3
senΣ
tgδ 2 =
ω2
+ cosΣ
ω3
Si se desea cambiar el sentido de giro de uno de los ejes, se deberá usar un cono con contacto
interior y otro con contacto exterior, según se muestra en la figura 3.
3
P
δ2
R2 δ3
2 Σ
O
R3
Fig-3. Conos de fricción con contacto interior.
En este caso se obtiene que δ 3 = Σ + δ 2 , luego:
Engranajes. Consideraciones geométricas. Pag-6
MECANISMOS Engranajes. Consideraciones geométricas.
senΣ ⋅ cosδ 2 + cosΣ ⋅ senδ 2 ω2
=
senδ 2 ω3
de donde:
senΣ ω
+ cosΣ = 2
tgδ 2 ω3
senΣ
tgδ 2 =
ω2
− cosΣ
ω3
2.3- Hiperboloides de fricción.
En la figura 4 las superficies de contacto son hiperboloides. Un hiperboloide puede generarse
por rotación de una línea alrededor de un eje con el que no es paralela, ni se corta. En la figura 4, la
línea A-A se ha rotado alrededor del eje B-B, manteniendo R2 y φ2 constantes, para generar el
hiperboloide 2. Por otra parte, rotando A-A alrededor del eje C-C, manteniendo R3 y φ3 constantes, se
genera el hiperboloide 3.
V VP3
VP2 φ
Paralela a A-A 2 φ
3 B
A
C φ C
3
A P=P
2 3
φ2 3
B 2
B B
R2
A A
P=P
2 3
R3
C C
Fig-4. Hiperboloides de fricción.
Al ser generados de esta forma los hiperboloides, la línea A-A pertenece tanto al 2 como al 3
siendo el elemento de superficie común. Los círculos de radio mínimo, para cada uno de los
Engranajes. Consideraciones geométricas. Pag-7
MECANISMOS Engranajes. Consideraciones geométricas.
hiperboloides, son los de radio R2 y R3. Cuando dos hiperboloides como los mostrados giran alrededor
de sus ejes, presentan contacto de rodadura en dirección normal al elemento común de superficie, pero
presentarán deslizamiento a lo largo de dicho elemento, de forma que:
v P2 = ω 2 ⋅ R2
v P3 = ω 3 ⋅ R3
estando relacionadas las velocidades absolutas de los puntos de contacto con la velocidad de
deslizamiento (velocidad relativa) mediante la expresión vectorial:
r r r
v P3 = v P2 + v
2.4- Conclusiones.
Como se ha visto, tanto los cilindros de fricción como los conos de fricción pueden presentar
contacto de rodadura pura entre sus superficies siempre y cuando el rozamiento sea lo suficientemente
elevado, para evitar el deslizamiento.
En la práctica, para conseguir esto se utilizan superficies que presenten un elevado coeficiente
de rozamiento, pero nunca se puede asegurar que el contacto sea únicamente de rodadura.
Por otra parte, si se quiere aumentar el par a transmitir para un coeficiente determinado de
rozamiento, se debe aumentar la fuerza con la que se presionan las ruedas de fricción, según se
muestra en la figura 5:
R 1 T1 P
Pµ
T2
T2 T=P
2
µ R
2
R2 R2
P P
Fig-5. Par transmitido por ruedas de fricción.
Engranajes. Consideraciones geométricas. Pag-8
MECANISMOS Engranajes. Consideraciones geométricas.
Al aumentar la fuerza de contacto P, se está aumentando tanto el momento flector en el eje,
como las cargas sobre los rodamientos, lo cual repercutirá en una disminución de la vida de estos
elementos.
Otra operación que puede realizarse para aumentar el par transmitido sin aumentar P es un
dentado en las ruedas, de forma que estas engranen entre sí sin necesidad de que toda la potencia se
transmita gracias al rozamiento. Cuando se realiza esta operación, las ruedas de fricción se
transforman en ruedas dentadas que cuando se unen entre sí para transmitir potencia o movimiento
reciben el nombre de engranajes. El estudio de los engranajes es el tema que va a ser tratado a
continuación.
3- ENGRANAJES
3.1- Relación de transmisión.
3.1.1- Introducción.
Anteriormente se definió la relación de transmisión de dos ruedas (cilindros, conos o
hiperboloides) de fricción como el cociente entre la velocidad angular de cada una de las ruedas; en los
engranajes su significado es el mismo, y resulta de gran importancia que esta relación sea constante,
no solo su valor medio, sino también su valor instantáneo.
A modo de ejemplo se presenta a continuación un caso en el que el valor medio de la relación
de transmisión es constante, pero su valor instantáneo no lo es. En la figura 6 se muestra un esquema
de una pareja de ruedas utilizadas en la Edad Media en molinos. Una de las ruedas tiene una serie de
palos dispuestos de forma radial e igualmente espaciados alrededor de la circunferencia del disco. Los
"dientes" de la segunda rueda consisten en unos palos cuyos ejes son perpendiculares al disco
(paralelos al eje de rotación).
Engranajes. Consideraciones geométricas. Pag-9
MECANISMOS Engranajes. Consideraciones geométricas.
Fig-6. Ruedas empleadas en molinos medievales.
En la figura 7 se muestra una representación simplificada de dicho mecanismo:
Do
W W
R2 D R+W
2
D
R q A R1 q A
C
Fig-7. Representación esquemática de las ruedas de los molinos medievales.
Las ecuaciones de bucle cerrado en el intervalo (q1 ≤ q ≤ q 2 ) durante el cual engrana un par
de dientes serán:
π
R1 ⋅ cosq + (R2 + W ) ⋅ cos + A + D ⋅ cosA − C = 0
2
π
R1 ⋅ senq + (R2 + W ) ⋅ sen + A + D ⋅ senA = 0
2
Donde las incógnitas son las variables A y D.
Diferenciando las ecuaciones de bucle, se obtendrá la velocidad angular de la rueda conducida:
A& = q& ⋅ K a
En la figura 8 se representa los valores de Ka frente a q durante el intervalo en el que engranan
un par de dientes:
Engranajes. Consideraciones geométricas. Pag-10
MECANISMOS Engranajes. Consideraciones geométricas.
Ka
q
q1 q2
Fig-8. Valores de Ka frente a q.
Se ve que aunque la velocidad angular de la rueda conductora sea constante, la de la conducida
variará periódicamente, por lo que la velocidad del eje al que esté conectada también, sometiéndole a
un par alternativo que excitará con vibraciones torsionales a los elementos de la máquina produciendo
ruido, vibraciones y daño por fatiga.
Puesto que esto no debe permitirse en las máquinas, menos aún en las modernas que transmiten
elevadas potencias a altas velocidades, se deberá conseguir que la relación de transmisión permanezca
constante instantáneamente.
3.1.2- Condición para relación de transmisión constante: Ley de engrane.
En la figura 9 se muestran dos cuerpos con contacto directo; sus velocidades de rotación son ω2
y ω3. En el punto de contacto la normal es n-n (línea de contacto, de acción o de presión) y la tangente
t-t, Se supondrá que el cuerpo 2 es el conductor siendo el cuerpo 3 el conducido.
n
t
B2 =B3
2
F VB2 3
t O2 VB3 P O3
1 1
G
n
Fig-9. Eslabones con contacto directo.
Engranajes. Consideraciones geométricas. Pag-11
MECANISMOS Engranajes. Consideraciones geométricas.
r r
Como se vio con anterioridad las proyecciones de las velocidades VB2 y VB3 sobre la normal
común, han de ser iguales, luego:
V B2 n = ω2 ⋅ O2 F
V B3 n = ω3 ⋅ O3 G
puesto que: VB2 n = VB3n ⇒ ω 2 ⋅ O2 F = ω 3 ⋅ O3 G
ω 2 O3 G
=
ω 3 O2 F
El punto P, intersección de la línea de acción con la línea de centros, se denomina punto
primitivo.
∆ ∆
Por otra parte los triángulos O2 FP y O3 GP son semejantes por lo tanto:
O3 G O3 P
=
O2 F O2 P
Con lo que se obtendrá que:
ω 2 O3 P
i= =
ω 3 O2 P
O3 P
Luego si se quiere lograr que i=cte, la relación deberá ser constante, es decir que la línea
O2 P
de presión deberá cortar a la línea de centros siempre en el mismo punto P.
Esta conclusión es la denominada " Ley fundamental de engrane" que dice: para que la relación
de transmisión se mantenga constante, la localización del punto primitivo debe ser invariable.
3.2- Perfiles conjugados.
Se acaba de demostrar que para que la relación de transmisión permanezca constante, el punto
primitivo (o de rodadura) debe permanecer estacionario. La posición de dicho punto viene
Engranajes. Consideraciones geométricas. Pag-12
MECANISMOS Engranajes. Consideraciones geométricas.
determinada por la intersección de la normal a las superficies en el punto de contacto con la línea de
centros, por lo tanto, esta posición dependerá de la forma de los perfiles de los dientes de las ruedas. Si
estos perfiles tienen una forma tal que la posición del punto primitivo es estacionario, se dice que son
perfiles conjugados. Por tanto, los perfiles de los dientes de las ruedas deberán ser conjugados para
satisfacer la ley fundamental de engrane.
Se debe notar que la propiedad de ser, o no, conjugados es una propiedad de los perfiles de un
par de dientes y no de uno sólo. A priori, para un perfil dado es posible encontrar un perfil conjugado,
pero puede suceder que su realización física sea imposible o, al menos, resulte de gran complejidad.
Por otra parte puede pensarse que puesto se puede calcular el perfil conjugado de un perfil
cualquiera, existirá una gran variedad de perfiles para los dientes de los engranajes; en realidad no es
así y la mayoría de los dientes de los engranajes utilizan el perfil de evolvente de círculo. Una
excepción a este perfil lo constituye el cicloidal utilizado ampliamente en la industria relojera.
La razón más poderosa para haberse estandarizado el perfil de evolvente es la facilidad que
presenta para su fabricación, además de otra serie de razones que se irán viendo en el desarrollo del
tema actual.
3.2.1- Evolvente de círculo.
Si sobre la circunferencia de la figura 10 se hace rodar la recta H, sin deslizamiento, la curva
que genera el punto P de la recta H se denomina evolvente de círculo.
H2
H1
P2
P
1
Evolvente de P H
circulo
Fig-10. Generación de la evolvente de círculo.
El círculo del cual se parte para la generación de la evolvente se denomina círculo base.
Engranajes. Consideraciones geométricas. Pag-13
MECANISMOS Engranajes. Consideraciones geométricas.
En la figura 11 se representa una curva evolvente de círculo. Puesto que el radio de curvatura en
el punto en estudio, por definición de evolvente, debe ser igual a la longitud del arco de la
circunferencia base comprendido en el sector circular de ángulo α+γ, se tendrá que:
ρ = rb ⋅ (α + γ )
y por otra parte:
ρ = rb ⋅ tgα
Igualando ambas ecuaciones:
rb ⋅ (α + γ ) = rb ⋅ tgα
α + γ = tgα
γ = tgα − α
n
ρ t
rb
α r α
γ t n
X
Fig-11. Coordenadas polares de la evolvente de círculo
Donde la función γ = tgα − α se denomina evolvente, luego Ev(α ) = γ siendo:
Ev(α ) = tgα − α .
Por otra parte:
Engranajes. Consideraciones geométricas. Pag-14
MECANISMOS Engranajes. Consideraciones geométricas.
rb r
cosα = ⇒r= b .
r cosα
luego las expresiones:
γ = Ev(α )
rb
r=
cosα
proporcionan las coordenadas, en forma polar, para cualquier punto de la evolvente en función del
parámetro α.
3.2.2- Dientes de perfil de evolvente.
Cuando se emplea la evolvente de círculo como perfil de los dientes de una rueda, se deben
emplear dos curvas tal y como se muestra en la figura 12.
t(r)
tp
γp
αp
γ(r)
α(r)
rb
r rp
Fig-12. Diente de perfil de evolvente de círculo.
La longitud a lo largo de un arco circular comprendida entre las dos evolventes, recibe el
nombre de espesor del diente; para un radio dado puede resultar de interés calcular cual es el espesor
de diente, conocido este para otro radio. Supongamos que para el radio rp el espesor del diente es tp y
se desea conocer el espesor t(r) para un radio cualquiera de valor r.
Atendiendo a la figura 12:
Engranajes. Consideraciones geométricas. Pag-15
MECANISMOS Engranajes. Consideraciones geométricas.
rb r
cosα (r ) = ⇒ α (r ) = arccos b
r r
Conocido α(r), la función de evolvente se puede expresar de la siguiente forma:
Ev(α (r ) ) = tg (α (r ) ) − (α (r ) )
De la misma manera:
rb r
cosα p = ⇒ α p = arccos b
rp rp
de forma que puede calcularse el valor de la función de evolvente para αp:
Ev(α p ) = tg (α p ) − (α p )
Por otra parte la diferencia de los ángulos determinados por los arcos tr/2 y tp/2 es:
tp t( r )
− = γ (r ) − γ p
2 ⋅ rp 2⋅r
Pero por ser el perfil una evolvente:
( )
γ ( r ) = tg α ( r ) − α ( r ) = EV α ( r )
γ p = tg α p − α p = EV (α p )
Por lo tanto el espesor del diente medido sobre un radio cualquiera r, se puede expresar como:
tp
t( r ) = 2 ⋅ r ⋅
2 ⋅ rp
( )
− Ev α ( r ) + Ev α p
( )
3.3- Términos y definiciones.
Antes de acometer con mayor profundidad el estudio de los engranajes en sí y de sus diferentes
tipos, se definirán una serie de términos, sirviendo como apoyo la figura 13, cuya utilización va a ser
continua a lo largo de la exposición del tema.
Engranajes. Consideraciones geométricas. Pag-16
MECANISMOS Engranajes. Consideraciones geométricas.
Superficies primitivas: Son las superficies que sirven de referencia para generar los engranajes y
son aquellas que definen un par de ruedas de fricción (que ruedan sin deslizar). Como se verá más
adelante, las superficies primitivas podrán estar constituidas por dos cilindros, conos o hiperboloides,
dependiendo del tipo de engranaje.
Circulo primitivo: Circulo obtenido al dar una sección a la superficie primitiva según un plano
perpendicular el eje de giro.
Piñón: La más pequeña de las dos ruedas que forman un engranaje. La más grande se
denominará simplemente rueda.
espesor de
cara hueco
paso espesor de
flanco diente
circunferencia de cabeza
altura
huelgo circunferencia primitiva
de cabeza
alturarf circunferencia base
rb r
de pie ra circunferencia de pie
Fig-13. Parámetros geométricos de una rueda dentada.
Paso o paso circular: Es la distancia, medida sobre la circunferencia primitiva, desde un punto
de un diente hasta el mismo punto en el diente adyacente.
π⋅d
p=
z
Módulo: Es la relación del diámetro de la circunferencia primitiva (en mm) al número de dientes
de la rueda. El módulo es un índice del tamaño de los dientes.
d p
m= =
z π
Espesor del diente: Espesor de un diente medido sobre la circunferencia primitiva.
p
t=
2
Engranajes. Consideraciones geométricas. Pag-17
MECANISMOS Engranajes. Consideraciones geométricas.
Ancho del hueco: Anchura del hueco entre dos dientes medido sobre la circunferencia primitiva.
Altura de cabeza o adendo: Distancia radial desde el borde superior del diente a la
circunferencia primitiva. Normalmente se hace igual al módulo.
ha = m
Altura de pie o dedendo: Distancia radial desde el borde inferior del diente a la circunferencia
primitiva.
h f = 1 ,2 ⋅ m
Holgura: Distancia radial medida desde el círculo de pie al círculo que es tangente al de cabeza
de la rueda acoplada. La altura de pie de una rueda debe ser mayor que la altura de cabeza de la rueda
que se la acopla.
Circunferencia base: Es la circunferencia que sirve de base para generar el perfil de evolvente.
Engranajes. Consideraciones geométricas. Pag-18
MECANISMOS Engranajes. Consideraciones geométricas.
BIBLIOGRAFIA:
Título: ELEMENTOS DE MAQUINAS.
Autor: K. H. Decker.
Editorial: Urmo.
Título: KINEMATICS AND DYNAMICS OF MACHINES.
Autor: Geroge H. Martin.
Editorial: McGraw Hill.
Título: MECHANICS OF MACHINES.
Autor: Samuel Doughty.
Editorial: John Wiley & Sons.
Título: MECANICA DE MAQUINAS.
Autor: Ham, Crame, Rogers.
Editorial: McGraw-Hill.
Título: CINEMATICA Y DINAMICA DE MAQUINAS.
Autor: A. de Lamadrid.
Editorial: Sección de Publicaciones ETSII de Madrid.
Título: TEORIA DE MAQUINAS Y MECANISMOS.
Autor: Joseph E. Shigley.
Editorial: McGraw-Hill.
Engranajes. Consideraciones geométricas. Pag-19
You might also like
- Trabajo 2 Fisica IiiDocument2 pagesTrabajo 2 Fisica Iiikathy garciaNo ratings yet
- Guía rápida liquidación gastos e-SidifDocument10 pagesGuía rápida liquidación gastos e-SidifmarianofernandezNo ratings yet
- Resumen Capitulo 7 Desarrollo Cognitivo Durante Los Primeros Tres AñosDocument10 pagesResumen Capitulo 7 Desarrollo Cognitivo Durante Los Primeros Tres AñosMagten CupulNo ratings yet
- Examen Final Metodologia UniversaitariaDocument6 pagesExamen Final Metodologia Universaitariachristian0% (1)
- Compilado Proceso PDFDocument318 pagesCompilado Proceso PDFAngie MirandaNo ratings yet
- MÉTODOS (Administración de Operaciones)Document7 pagesMÉTODOS (Administración de Operaciones)PatitoNo ratings yet
- Roles y Responsabilidades-ACCESDocument3 pagesRoles y Responsabilidades-ACCESlinaNo ratings yet
- ANUIES OFICIAL NM FacilitadorDocument96 pagesANUIES OFICIAL NM FacilitadorAlberto FVallesNo ratings yet
- Sofística SócratesDocument8 pagesSofística SócratesJosé Ramos SalgueroNo ratings yet
- Mercadona AnalisisDocument13 pagesMercadona Analisisicastrou50% (2)
- 15.04. Cronograma de Adquisicion de EquiposDocument9 pages15.04. Cronograma de Adquisicion de EquiposRios Armas SamNo ratings yet
- Presupuesto Aldea BrasileraDocument4 pagesPresupuesto Aldea BrasileraYamalubNo ratings yet
- Instalación de torres de comunicación en CuzcoDocument6 pagesInstalación de torres de comunicación en CuzcoAlberto NeriNo ratings yet
- 200 Tareas Terapia BreveDocument5 pages200 Tareas Terapia BrevePremarthi PrabhuNo ratings yet
- 3484 0510646Document98 pages3484 0510646FernandoNo ratings yet
- Ada 3 CINEMATICADocument11 pagesAda 3 CINEMATICALe Yo CaNo ratings yet
- Productos Químicos Utilizados en La CasaDocument7 pagesProductos Químicos Utilizados en La CasaMelisa LeivaNo ratings yet
- Maquina Dosificadora de Masa para Elaboracion de HumitasDocument143 pagesMaquina Dosificadora de Masa para Elaboracion de HumitasdenarNo ratings yet
- Atlas PDFDocument122 pagesAtlas PDFMorpheus AlvarezNo ratings yet
- Cálculo EMF líneas aéreasDocument2 pagesCálculo EMF líneas aéreasEnrique MirandaNo ratings yet
- Modelos de Correlación Entre El PDC y El CBR Inalterado PaDocument23 pagesModelos de Correlación Entre El PDC y El CBR Inalterado PaSara Ramirez Valencia100% (2)
- Motivación: de Los Conceptos A Las AplicacionesDocument5 pagesMotivación: de Los Conceptos A Las AplicacionesAndrea RenneeNo ratings yet
- Guia 10 SLPDocument7 pagesGuia 10 SLPRenzo Presbitero AmpueroNo ratings yet
- 3.3.1 Falasias PDFDocument6 pages3.3.1 Falasias PDFGabriel GalanNo ratings yet
- Guy Debord Ha Muerto (Luther Blisset)Document12 pagesGuy Debord Ha Muerto (Luther Blisset)anonimocontemporaneo100% (1)
- MA465 S03 S08 CS03 Caso 3 Nuevo Laboratorio Químico AlumnosDocument6 pagesMA465 S03 S08 CS03 Caso 3 Nuevo Laboratorio Químico AlumnosLuis Angel Poma Palacios0% (1)
- Glosario Teoría Del Derecho PDFDocument8 pagesGlosario Teoría Del Derecho PDFLuis Mariano Betrian Aldea100% (1)
- Introducción A La Metodología BIM Una PUno PDFDocument68 pagesIntroducción A La Metodología BIM Una PUno PDFDjBenjaPaucarYagamiNo ratings yet
- Obtencion de NitratosDocument7 pagesObtencion de NitratosAdrian VelascoNo ratings yet
- Cables Con Cargas DistribuidasDocument25 pagesCables Con Cargas DistribuidasYTll Gian llNo ratings yet