You might also like
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- ch5 Two-Degree of SystemsDocument14 pagesch5 Two-Degree of SystemsMahmoud Abdelghafar ElhussienyNo ratings yet
- Finite Element Notes3 - BTech-1Document5 pagesFinite Element Notes3 - BTech-1Amjad AtayaNo ratings yet
- Aircraft Stability and Control - Lec07Document9 pagesAircraft Stability and Control - Lec07Akeel AliNo ratings yet
- Mathematical Simulation of Damping Oscillation On Motorcycle SuspensionDocument10 pagesMathematical Simulation of Damping Oscillation On Motorcycle Suspensionاحمد محمدNo ratings yet
- Forced Response of R-L Circuits (Circuit Analysis With A DC Voltage Source)Document3 pagesForced Response of R-L Circuits (Circuit Analysis With A DC Voltage Source)Huzaifa RehanNo ratings yet
- HW 7Document8 pagesHW 7Manuel Salmerón BecerraNo ratings yet
- CE 809 - Lecture 2 - Free Vibration Response of SDF SystemsDocument31 pagesCE 809 - Lecture 2 - Free Vibration Response of SDF SystemsArslan UmarNo ratings yet
- Equation Appendix Final ExamDocument5 pagesEquation Appendix Final ExamDhanush raoNo ratings yet
- Lecture 13 Ece4330tDocument54 pagesLecture 13 Ece4330tHamza AteeqNo ratings yet
- Bloch TheoremDocument2 pagesBloch TheoremSurajNo ratings yet
- 5 Matrix Form of Linear Transformations, Column and Row Space of A MatrixDocument19 pages5 Matrix Form of Linear Transformations, Column and Row Space of A MatrixKaveesha JayasuriyaNo ratings yet
- FEA Project Report - Alireza KhorshidiDocument11 pagesFEA Project Report - Alireza KhorshidicvcNo ratings yet
- Complex ModulusDocument2 pagesComplex ModulusJimenezNo ratings yet
- Detuning Effect of Multiple Tuned Mass DDocument4 pagesDetuning Effect of Multiple Tuned Mass Dधीरज कुमारNo ratings yet
- Fourier Series and TransformDocument16 pagesFourier Series and TransformSalvacion BandoyNo ratings yet
- ENGR 311 Fall 2018 Lab4 Notes PDFDocument4 pagesENGR 311 Fall 2018 Lab4 Notes PDFOburu David KatandiNo ratings yet
- Lecture 4Document5 pagesLecture 4Kaveesha JayasuriyaNo ratings yet
- 2018 Quantum II Lecturer NotesDocument62 pages2018 Quantum II Lecturer NotesGideon Addai100% (1)
- 10-1 and 13-1 Overheads (Landscape) PDFDocument10 pages10-1 and 13-1 Overheads (Landscape) PDFHabtamu GeremewNo ratings yet
- Euler AnglesDocument4 pagesEuler AnglesAkash WaitageNo ratings yet
- Kinematics: 1 Deformation and DisplacementDocument15 pagesKinematics: 1 Deformation and DisplacementAayush RajputNo ratings yet
- Example Questions and Answers EENG 482Document5 pagesExample Questions and Answers EENG 482Mackdonald ShiwaniNo ratings yet
- Lag Rang Ian Dynamic Formulation of A Four-Bar MechanismDocument7 pagesLag Rang Ian Dynamic Formulation of A Four-Bar MechanismpradeepkumaruvNo ratings yet
- Lab 05 PDFDocument7 pagesLab 05 PDFAbdul Rehman AfzalNo ratings yet
- Lecture 1Document6 pagesLecture 1Bredley SilvaNo ratings yet
- Calculus 4 Engineers Notes (AutoRecovered)Document11 pagesCalculus 4 Engineers Notes (AutoRecovered)Alvin MachotaNo ratings yet
- Math+204+Lecture+Notes+by+Ebraheem+Alzahrani Section+7.4Document5 pagesMath+204+Lecture+Notes+by+Ebraheem+Alzahrani Section+7.4Madelline Naomi De la Cruz MartínezNo ratings yet
- Single Degree of Freedom System SDOF (Undamped)Document15 pagesSingle Degree of Freedom System SDOF (Undamped)Fahad ChaudharyNo ratings yet
- Kinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDocument6 pagesKinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDeepak BharadwajNo ratings yet
- Module VI - ME205Document20 pagesModule VI - ME205Hari650No ratings yet
- Modeling and Vibrational Analysis of A Sdof System: Marcio Holanda SoutoDocument7 pagesModeling and Vibrational Analysis of A Sdof System: Marcio Holanda SoutoMarcelo CavalcantiNo ratings yet
- 6 Dof Robotic Manipulator Mathematics and ModelsDocument6 pages6 Dof Robotic Manipulator Mathematics and ModelsErwin Lopez ZapataNo ratings yet
- Small Signal Staibili Studies On Wetsern Region NetworkDocument10 pagesSmall Signal Staibili Studies On Wetsern Region NetworkSaugato MondalNo ratings yet
- Material 2 - Modelling DC Motor Transfer Function 1Document3 pagesMaterial 2 - Modelling DC Motor Transfer Function 1AnutNo ratings yet
- Section 5: Finite Volume Methods For The Navier Stokes EquationsDocument27 pagesSection 5: Finite Volume Methods For The Navier Stokes EquationsUmutcanNo ratings yet
- Element Free Galerkin MethodDocument5 pagesElement Free Galerkin MethodsamirsilvasalibaNo ratings yet
- ASM990 Final ReportDocument3 pagesASM990 Final ReportghotimeNo ratings yet
- 0512.3543.2022a2 SolDocument9 pages0512.3543.2022a2 SolSapir HarelNo ratings yet
- Physics 1 - LESSON 9 (Mid - Spring 24)Document14 pagesPhysics 1 - LESSON 9 (Mid - Spring 24)faisalfahim228No ratings yet
- Vibration Group 2 CompressedDocument51 pagesVibration Group 2 CompressedRonaldRajumNo ratings yet
- Part1 VIB Subset2 Analysis of MDOF Discrete Systems #2discretisation #3equations - of - Motion v2Document16 pagesPart1 VIB Subset2 Analysis of MDOF Discrete Systems #2discretisation #3equations - of - Motion v2Faze QadriNo ratings yet
- Equation of The Cosmological Constant From The Euler-Lagrange Equation of Second-Order Differentiable Gravitational Field LagrangianDocument17 pagesEquation of The Cosmological Constant From The Euler-Lagrange Equation of Second-Order Differentiable Gravitational Field LagrangianMichaël ParadjianNo ratings yet
- On Spectral Element MethodDocument38 pagesOn Spectral Element MethodBaharulHussainNo ratings yet
- Canonical Form of The Second Order PDE: (Week 3) Lectures 5-6 Over View of Previous LectureDocument8 pagesCanonical Form of The Second Order PDE: (Week 3) Lectures 5-6 Over View of Previous Lecturemudassirahmad 2413.21No ratings yet
- Part1 Subset4 VIB Analysis of MDOF Discrete Systems #4MDOF Equations & Solution #5Eigenvalues&EigenvectorsDocument6 pagesPart1 Subset4 VIB Analysis of MDOF Discrete Systems #4MDOF Equations & Solution #5Eigenvalues&EigenvectorsFaze QadriNo ratings yet
- T6lekk Mmbmro HF1 PDFDocument11 pagesT6lekk Mmbmro HF1 PDFBenci MonoriNo ratings yet
- MA1511 2021S1 Chapter 4 Vector FieldsDocument22 pagesMA1511 2021S1 Chapter 4 Vector FieldsJustin NgNo ratings yet
- Ref4-Some Elements of Operational Modal Analysis PDFDocument12 pagesRef4-Some Elements of Operational Modal Analysis PDFBelaliaNo ratings yet
- 3 - Annotated Notes - Variational Principles - Wed Sept 22, 2021Document8 pages3 - Annotated Notes - Variational Principles - Wed Sept 22, 2021Luay AlmniniNo ratings yet
- Partial Differential Equation Part C Upto 21octDocument7 pagesPartial Differential Equation Part C Upto 21octaayush.5.parasharNo ratings yet
- By: Vioh: IB Diploma Math HL ExplorationDocument13 pagesBy: Vioh: IB Diploma Math HL Exploration钱俊翰No ratings yet
- Global Stiffness MatrixDocument13 pagesGlobal Stiffness Matrixasfsaf0% (1)
- Power System StabilityDocument6 pagesPower System Stabilitymrs000420No ratings yet
- Ajms 477 23Document14 pagesAjms 477 23BRNSS Publication Hub InfoNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Art AtlasDocument175 pagesArt AtlasKoral ToptopNo ratings yet
- Mixing Sulphiric Acid With Water: Fluorspar Fluorite Calcium Sulphate ChloroformDocument4 pagesMixing Sulphiric Acid With Water: Fluorspar Fluorite Calcium Sulphate ChloroformKoral ToptopNo ratings yet
- Lec14 10132006Document5 pagesLec14 10132006nizamnizam95No ratings yet
- Suitable Light Source For Photosynthesis: Relationship Btw. Wavelenght & PhotosynthesisDocument2 pagesSuitable Light Source For Photosynthesis: Relationship Btw. Wavelenght & PhotosynthesisKoral ToptopNo ratings yet
- Lec14 10132006Document5 pagesLec14 10132006nizamnizam95No ratings yet
- DI WaterDocument2 pagesDI WaterKoral ToptopNo ratings yet
- Lec14 10132006Document5 pagesLec14 10132006nizamnizam95No ratings yet
- BasicMath VectorsDocument3 pagesBasicMath VectorsKoral ToptopNo ratings yet
- What Are The Differences Between Implicit and Explicit?: Weak SpringDocument2 pagesWhat Are The Differences Between Implicit and Explicit?: Weak SpringKoral ToptopNo ratings yet
- Make StackDocument1 pageMake StackKoral ToptopNo ratings yet
- Modal Analysis: Undamped Unforced System SolutionDocument2 pagesModal Analysis: Undamped Unforced System SolutionKoral ToptopNo ratings yet
- Bearing LoadsDocument1 pageBearing LoadsKoral ToptopNo ratings yet
- ShipMotions TermsDocument1 pageShipMotions TermsKoral ToptopNo ratings yet
- Dynamic Anaylsis TypesDocument3 pagesDynamic Anaylsis TypesKoral ToptopNo ratings yet
- Zachariah 2006 - FEM of Adhesive Interface Between Steel and CFRPDocument71 pagesZachariah 2006 - FEM of Adhesive Interface Between Steel and CFRPKoral ToptopNo ratings yet
- Shape and Flow: Drag (Physics)Document9 pagesShape and Flow: Drag (Physics)Koral ToptopNo ratings yet
- DOC3 SailAreaCalculationsDocument2 pagesDOC3 SailAreaCalculationsKoral ToptopNo ratings yet
- Grabe HP-Yacht 02Document8 pagesGrabe HP-Yacht 02Koral ToptopNo ratings yet
- Yeni̇ Keli̇melerDocument2 pagesYeni̇ Keli̇melerKoral ToptopNo ratings yet
- Keel and Rudder DesignDocument18 pagesKeel and Rudder DesignLưu XuânNo ratings yet
- JournalDocument1 pageJournalKoral ToptopNo ratings yet
- Centrifugal Pump Piping Design LayoutDocument19 pagesCentrifugal Pump Piping Design Layoutvijayakumar2015No ratings yet
- Chapter-2 - IS MATTER AROUND US PUREDocument25 pagesChapter-2 - IS MATTER AROUND US PURESATYAM RATHOURNo ratings yet
- Hexamoll DINCH TDSDocument3 pagesHexamoll DINCH TDScmuthuprakashNo ratings yet
- 00s6. UI SS Lecture 6 Clastic Classification 1002Document33 pages00s6. UI SS Lecture 6 Clastic Classification 1002MuzzammilAlMackyNo ratings yet
- Carvalho KL Magalhaes WF 2012 Food Addit Contam Part A v29 n4.p679-93Document15 pagesCarvalho KL Magalhaes WF 2012 Food Addit Contam Part A v29 n4.p679-93Xochilt BlandónNo ratings yet
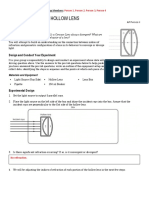
- Lab 16 - Hollow LensDocument2 pagesLab 16 - Hollow Lensapi-408463795No ratings yet
- Science Magazine April 07 2006 PDFDocument144 pagesScience Magazine April 07 2006 PDFAndrés FrankowNo ratings yet
- ESB 2018 Abstract Proceedings 4Document1,099 pagesESB 2018 Abstract Proceedings 4Alan PolancoNo ratings yet
- (SM) M (2 3 4 5) OE 14 42HFN1 Q (Multi Outdoor) - EngDocument57 pages(SM) M (2 3 4 5) OE 14 42HFN1 Q (Multi Outdoor) - EngDee RajaNo ratings yet
- WHO Monograph CurcumaDocument8 pagesWHO Monograph CurcumaMuhammad Miftahul HudaNo ratings yet
- Pile Capacity APIDocument30 pagesPile Capacity APIsitti.a100% (1)
- 3102 Shade Matching in Aesthetic Dentistry From Past To Recent Advances PDFDocument9 pages3102 Shade Matching in Aesthetic Dentistry From Past To Recent Advances PDFsapnaNo ratings yet
- Light Fresh Sun Gel SPF 30 PA+++ (Formulation #UV-DE-14-166-2-4)Document2 pagesLight Fresh Sun Gel SPF 30 PA+++ (Formulation #UV-DE-14-166-2-4)Anahit AvagyanNo ratings yet
- Duragyp 13mm AA - VOC Emission Report - Indoor Air Comfort GoldDocument20 pagesDuragyp 13mm AA - VOC Emission Report - Indoor Air Comfort GoldDimitris KousoulasNo ratings yet
- Solution To Problem 503 - Flexure FormulaDocument23 pagesSolution To Problem 503 - Flexure FormulaLara GatbontonNo ratings yet
- Template IJoSTDocument8 pagesTemplate IJoSTanatun nisa munamahNo ratings yet
- FDA - ICH M7 (R1) - Control of Mutagenic Impurities in Pharmaceuticals 03.2018Document131 pagesFDA - ICH M7 (R1) - Control of Mutagenic Impurities in Pharmaceuticals 03.2018Catrinescu OanaNo ratings yet
- Hand Written NotesDocument12 pagesHand Written NotesOne phase 23No ratings yet
- Analytica Chimica Acta: Jacopo La Nasa, Francesca Modugno, Matteo Aloisi, Anna Lluveras-Tenorio, Ilaria BonaduceDocument8 pagesAnalytica Chimica Acta: Jacopo La Nasa, Francesca Modugno, Matteo Aloisi, Anna Lluveras-Tenorio, Ilaria Bonaducejuanda.scienceNo ratings yet
- Chapter 3Document3 pagesChapter 3Quennie Dhea AdanzaNo ratings yet
- TOEFL Prediction Test 2: Mohon Materi Tes Ini Tidak Diberikan Kepada SiapapunDocument6 pagesTOEFL Prediction Test 2: Mohon Materi Tes Ini Tidak Diberikan Kepada Siapapunbatpersero12100% (1)
- Enen 619-03 Final Research ProjectDocument26 pagesEnen 619-03 Final Research ProjectSalman NoorNo ratings yet
- ASTM GradesDocument4 pagesASTM GradesSaurabh MundheNo ratings yet
- Tri State Mining District: OverviewDocument10 pagesTri State Mining District: OverviewChristopher WisemanNo ratings yet
- Rochelle's Salt As An Alternative PiezoelectricDocument10 pagesRochelle's Salt As An Alternative PiezoelectricSudharshan KomandurNo ratings yet
- UGSemsterSyllabus Chemistry 5Sem6AChemistry EnglishDocument169 pagesUGSemsterSyllabus Chemistry 5Sem6AChemistry EnglishAnil GugulothNo ratings yet
- Sikaceram - 288 MyDocument4 pagesSikaceram - 288 MyKenji TanNo ratings yet
- TSB339Document6 pagesTSB339Anderson Alejandro Benites ZelayaNo ratings yet
- Digestive SystemDocument102 pagesDigestive Systemkavya nandhiNo ratings yet
- Kinetic Aspects in The OxidationDocument5 pagesKinetic Aspects in The OxidationKatiane MesquitaNo ratings yet