You might also like
- Ingeniería antisísmica: Sistemas de 1 grado de libertadDocument25 pagesIngeniería antisísmica: Sistemas de 1 grado de libertadJhonn Cañari Huaylla100% (1)
- Respuesta vibración libreDocument39 pagesRespuesta vibración libreRonaldo Jacinto ENo ratings yet
- Ingenieria Sismorresistente 2021 - Semana 1Document69 pagesIngenieria Sismorresistente 2021 - Semana 1Italoo LoliNo ratings yet
- Clases de Analisis EstructuralDocument14 pagesClases de Analisis EstructuralDiego BalboaNo ratings yet
- Análisis EstructuralDocument3 pagesAnálisis EstructuralIvan Esteban GarciaNo ratings yet
- C5 Vibracion LibreDocument14 pagesC5 Vibracion LibreCesar Turrin LleellishNo ratings yet
- Diapositivas SismicaDocument20 pagesDiapositivas SismicaShiomara Delgado CollantesNo ratings yet
- Sistemas de Un Grado de LibertadDocument6 pagesSistemas de Un Grado de LibertadFernando CruzNo ratings yet
- Dinámica de Sistemas de 1 GDLDocument16 pagesDinámica de Sistemas de 1 GDLjonypres19No ratings yet
- Ingenieria Sismorresistente 2021 - Semana 2Document56 pagesIngenieria Sismorresistente 2021 - Semana 2Italoo LoliNo ratings yet
- Ingenieria SismicaDocument12 pagesIngenieria SismicarodrigoNo ratings yet
- Sem 2Document27 pagesSem 2Gabriela HuertaNo ratings yet
- Ensayo CBRDocument19 pagesEnsayo CBRRay Gonzalo Figueroa GibajaNo ratings yet
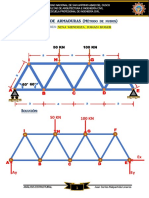
- Análisis de armaduras mediante el método de nudosDocument6 pagesAnálisis de armaduras mediante el método de nudosJohan Roger Nina MendozaNo ratings yet
- Conclusiones Microzonificacion SismicaDocument34 pagesConclusiones Microzonificacion SismicagilmarNo ratings yet
- 02 - Dinámica de Estructuras - N GDL - Ecuaciones de Movimiento - Sistemas LinealesDocument24 pages02 - Dinámica de Estructuras - N GDL - Ecuaciones de Movimiento - Sistemas LinealesRicardo Alejandro Oyarce ArmijoNo ratings yet
- LicuacionDocument6 pagesLicuacionEdgar SoteloNo ratings yet
- ANTISISMICADocument43 pagesANTISISMICAJhonn Cañari HuayllaNo ratings yet
- Resistencia de materiales: Momento flector, fuerza cortante y tensionesDocument44 pagesResistencia de materiales: Momento flector, fuerza cortante y tensionesEdy Erazo MalaverNo ratings yet
- C3 Libre 19 2 PDFDocument33 pagesC3 Libre 19 2 PDFyessicaNo ratings yet
- Sistemas de un grado de libertadDocument40 pagesSistemas de un grado de libertadItaloo LoliNo ratings yet
- Hidrad CanalesDocument21 pagesHidrad CanalesFrancis Meza BarrientosNo ratings yet
- IT - Dinámica de Sistemas de N Grados de LibertadDocument29 pagesIT - Dinámica de Sistemas de N Grados de LibertadAlexander BVNo ratings yet
- 4.1 Diseno SismorresistenteDocument14 pages4.1 Diseno SismorresistenteRonaldo Jacinto ENo ratings yet
- S13 - A FUERZAS INTERNAS Mecánica Vectorial - EstáticaDocument40 pagesS13 - A FUERZAS INTERNAS Mecánica Vectorial - EstáticaRenzo Daniel Camac javierNo ratings yet
- Conceptos Fundamentales de EdificacionDocument45 pagesConceptos Fundamentales de EdificacionFRITZCHANGNo ratings yet
- Ingeniería Sismorresistente UNIDocument11 pagesIngeniería Sismorresistente UNIcesarNo ratings yet
- Método de Rigidez Puntos de ExposicionDocument5 pagesMétodo de Rigidez Puntos de ExposicionWuillian Jose MendezNo ratings yet
- 11 PDFDocument159 pages11 PDFDaniel GcNo ratings yet
- Espectros de Respuesta y de DiseñoDocument22 pagesEspectros de Respuesta y de DiseñoDaniel CristanchoNo ratings yet
- D08 - Resistencia de Materiales Tema 1 Parte 1 ESFUERZO PDFDocument40 pagesD08 - Resistencia de Materiales Tema 1 Parte 1 ESFUERZO PDFMateo :3 Gallardo :vNo ratings yet
- Zonificación Y MICROzonificación SísmicaDocument20 pagesZonificación Y MICROzonificación SísmicasolNo ratings yet
- 1gdl seismic responseDocument17 pages1gdl seismic responsekevinNo ratings yet
- 3 (1) - Clase 2 DinamicaDocument112 pages3 (1) - Clase 2 DinamicaJuan Carlos Caracas ValladaresNo ratings yet
- Modelos dinámicos de un grado de libertadDocument22 pagesModelos dinámicos de un grado de libertadJimmy Frank Berrospi AlvaradoNo ratings yet
- Informe - SismicaDocument19 pagesInforme - SismicaWilton Romero AireNo ratings yet
- Fundamentos de sismología y riesgo sísmicoDocument90 pagesFundamentos de sismología y riesgo sísmicoJuan Carlos Vega PonteNo ratings yet
- Bellas Artes, MexicoDocument4 pagesBellas Artes, MexicoJonattan MonterrosoNo ratings yet
- Analisis Sismico Estatico de Edificaciones Aporticados Norma NECDocument124 pagesAnalisis Sismico Estatico de Edificaciones Aporticados Norma NECMiguel TisalemaNo ratings yet
- Trabajo de Diseño SismoresistenteDocument12 pagesTrabajo de Diseño SismoresistenteAmedalig Rojas RomanNo ratings yet
- Sesión 07Document58 pagesSesión 07CHRISTIAN ORLANDO RUPAY SANTOSNo ratings yet
- C1 - Cap1 - IntroducciónDocument28 pagesC1 - Cap1 - IntroducciónRoberto Sotomayor MurilloNo ratings yet
- Capitulo 8Document63 pagesCapitulo 8noelNo ratings yet
- CLASE 02 y 03 APLICACION DE EL METODO DE RIGIDEZ PDFDocument109 pagesCLASE 02 y 03 APLICACION DE EL METODO DE RIGIDEZ PDFWilmer Peña RomeroNo ratings yet
- Sesión 4 - Trabajo y EnergíaDocument29 pagesSesión 4 - Trabajo y EnergíaMilagros Yaloha Pajuelo IparraguirreNo ratings yet
- Inestabilidad de Ladera o TaludesDocument39 pagesInestabilidad de Ladera o TaludesDavid P FNo ratings yet
- Ejercicios Sin AmortiguamientoDocument16 pagesEjercicios Sin AmortiguamientofabrizioNo ratings yet
- Dinamica Modal EspectralDocument11 pagesDinamica Modal EspectralAdan Aireo Granados LocoshonNo ratings yet
- Unidad I. Int. Dinámica de Estructuras. Dinámica de Estructuras Dinámica de EstructurasDocument5 pagesUnidad I. Int. Dinámica de Estructuras. Dinámica de Estructuras Dinámica de EstructurasMartin SeoaneNo ratings yet
- Libro Concreto Armado 1 Uni 1 DownloableDocument96 pagesLibro Concreto Armado 1 Uni 1 DownloableJorge Salas ChauNo ratings yet
- Mecánica Dinámica - Unidad 2 2017Document67 pagesMecánica Dinámica - Unidad 2 2017Leonardo Diaz GonzalezNo ratings yet
- Equilibrio DinamicoDocument20 pagesEquilibrio DinamicoConstrucciones labanNo ratings yet
- 2.1 Conceptos Basicos de Dinamica EstructuralDocument16 pages2.1 Conceptos Basicos de Dinamica EstructuralRonaldo Jacinto ENo ratings yet
- Sismica 02Document54 pagesSismica 02Oscar Choque JaqquehuaNo ratings yet
- Word - 30hojasDocument31 pagesWord - 30hojasAnaa09100% (1)
- Sistemas HíbridoDocument15 pagesSistemas HíbridoSamanta QuirozNo ratings yet
- Estruc DinamDocument80 pagesEstruc DinamJorge Eduardo GuillénNo ratings yet
- Solucion Integral de Convolucion - Dinamica EstructuralDocument30 pagesSolucion Integral de Convolucion - Dinamica EstructuralFelipe Aguirre CuartasNo ratings yet
- Sismo 1Document61 pagesSismo 1Gonzalo Gatica GómezNo ratings yet
- Metodología de proyecto sismorresistente de edificiosFrom EverandMetodología de proyecto sismorresistente de edificiosRating: 5 out of 5 stars5/5 (1)
- Percyteka - E' Metrado CargasDocument37 pagesPercyteka - E' Metrado CargasRonaldo Jacinto ENo ratings yet
- Manpower Consentimiento para El Tratamiento de Datos PersonalesDocument1 pageManpower Consentimiento para El Tratamiento de Datos PersonalesJaime Jair Rottweilas100% (1)
- Percyteka - E' Metrado CargasDocument37 pagesPercyteka - E' Metrado CargasRonaldo Jacinto ENo ratings yet
- Bach-Regist Bach-Dante-UsmDocument1 pageBach-Regist Bach-Dante-Usmnoe.eme.92No ratings yet
- Carta de Newmark Ms2Document21 pagesCarta de Newmark Ms2Ronaldo Jacinto ENo ratings yet
- CostasDocument4 pagesCostasRonaldo Jacinto ENo ratings yet
- Presa Los Ejidos PDFDocument201 pagesPresa Los Ejidos PDFRonaldo Jacinto ENo ratings yet
- Presa Los Ejidos Sistema ScsDocument4 pagesPresa Los Ejidos Sistema ScsRonaldo Jacinto ENo ratings yet
- 011 ValorizacionDocument40 pages011 ValorizacionRonaldo Jacinto ENo ratings yet
- Portadas de ValeriaDocument23 pagesPortadas de ValeriaRonaldo Jacinto ENo ratings yet
- Metrado Estructuras KilderDocument2 pagesMetrado Estructuras KilderRonaldo Jacinto ENo ratings yet
- FichaDocument2 pagesFichaRonaldo Jacinto ENo ratings yet
- Leyenda Peruana de Terror de La Runa MulaDocument27 pagesLeyenda Peruana de Terror de La Runa MulaRonaldo Jacinto ENo ratings yet
- Memoria DescriptivaDocument3 pagesMemoria DescriptivaRonaldo Jacinto ENo ratings yet
- Memoria DescriptivaDocument3 pagesMemoria DescriptivaRonaldo Jacinto ENo ratings yet
- Metrados de EstructurasDocument20 pagesMetrados de EstructurasrycproyectistaNo ratings yet
- La LecturaDocument1 pageLa LecturaRonaldo Jacinto ENo ratings yet
- Metrados de EstructurasDocument78 pagesMetrados de EstructurasRonaldo Jacinto ENo ratings yet
- Biografía de San Martín de ToursDocument1 pageBiografía de San Martín de ToursRonaldo Jacinto ENo ratings yet
- Compras SM 2017 DiciembreDocument68 pagesCompras SM 2017 DiciembreRonaldo Jacinto ENo ratings yet
- Practica N°1Document1 pagePractica N°1Ronaldo Jacinto ENo ratings yet
- Trabajo Escalonado N 02Document79 pagesTrabajo Escalonado N 02Ronaldo Jacinto ENo ratings yet
- Vale Región Chala o CostaDocument7 pagesVale Región Chala o CostaRonaldo Jacinto ENo ratings yet
- Informe ELECTRDocument13 pagesInforme ELECTRRonaldo Jacinto ENo ratings yet
- Compras SM 2017 DiciembreDocument14 pagesCompras SM 2017 DiciembreRonaldo Jacinto ENo ratings yet
- Trabajo Escalonado N 02Document79 pagesTrabajo Escalonado N 02Ronaldo Jacinto ENo ratings yet
- Analisis Sismico Estatico X-XDocument4 pagesAnalisis Sismico Estatico X-XRonaldo Jacinto ENo ratings yet
- METRADODocument14 pagesMETRADORonaldo Jacinto ENo ratings yet
- Consideraciones TecnicasDocument5 pagesConsideraciones TecnicasRonaldo Jacinto ENo ratings yet
- IntroducciónDocument6 pagesIntroducciónRonaldo Jacinto ENo ratings yet
- Tesis - Alva MejiaDocument181 pagesTesis - Alva MejiaJazmin Sanchez LaraNo ratings yet
- Aplicación de Un Circuito Eléctrico Conectado en Serie Del Tipo RC y RLDocument38 pagesAplicación de Un Circuito Eléctrico Conectado en Serie Del Tipo RC y RLdiego sebastianNo ratings yet
- TFM Mac DimDocument61 pagesTFM Mac DimCamilo Acuña CarreñoNo ratings yet
- Ensayo para La Introducción de La FilosofíaDocument2 pagesEnsayo para La Introducción de La Filosofíalorvervar100% (4)
- Ensayo Intervenciones de Vias UrinariasDocument8 pagesEnsayo Intervenciones de Vias UrinariasAngelo PérezNo ratings yet
- Expo1 Materiales G7Document16 pagesExpo1 Materiales G7Andres LopezNo ratings yet
- METRADOSDocument9 pagesMETRADOSorion peruNo ratings yet
- CARTUCHERÍADocument11 pagesCARTUCHERÍAMezala MANo ratings yet
- Comentarios Sobre "El Agua" de Francis PongeDocument1 pageComentarios Sobre "El Agua" de Francis PongeNicolas Mendez RamirezNo ratings yet
- Tema 6. Desarrollo Socioafectivo en La Primera InfanciaDocument64 pagesTema 6. Desarrollo Socioafectivo en La Primera InfanciaNaran MCNo ratings yet
- Acidos y BasesDocument18 pagesAcidos y Baseschem9203No ratings yet
- Diagrama de Gowin Del Paso 5 Cristian BurgosDocument5 pagesDiagrama de Gowin Del Paso 5 Cristian BurgosVeronica LoaizaNo ratings yet
- To de Higiene y Seguridad IndustrialDocument8 pagesTo de Higiene y Seguridad IndustrialEduardo Ramirez OsorioNo ratings yet
- ModelosCrecimientoPoblacionalDocument27 pagesModelosCrecimientoPoblacionalMeliza Qquelcca MamanquiNo ratings yet
- Costos conjuntos y subproductosDocument4 pagesCostos conjuntos y subproductosKaterin PradoNo ratings yet
- Manual Op Fab 2017 PDFDocument101 pagesManual Op Fab 2017 PDFJosé PerezNo ratings yet
- 3 Kotra PresentationDocument24 pages3 Kotra PresentationALEJANDRO YUNHEE CHONo ratings yet
- Ciclo Del MercurioDocument1 pageCiclo Del MercurioAnonymous B0bYF6100% (1)
- Aa-Actividad PT 7.2.8 Netacad. Verifique El Direccionamiento Ipv4 E Ipv6 1878829Document14 pagesAa-Actividad PT 7.2.8 Netacad. Verifique El Direccionamiento Ipv4 E Ipv6 1878829Daniel de LeonNo ratings yet
- Desgaste y Vida de Las Herramientas PDFDocument4 pagesDesgaste y Vida de Las Herramientas PDFCarlos Javier AstudilloNo ratings yet
- Ficha - 300 - JujuujjuDocument1 pageFicha - 300 - JujuujjuPaul OchoaNo ratings yet
- La LATTICE y La ESTRUCTURA Del ESPACIODocument5 pagesLa LATTICE y La ESTRUCTURA Del ESPACIOLuis ChavezNo ratings yet
- Unidad 3 Actividad 1 Subir ArchivoDocument2 pagesUnidad 3 Actividad 1 Subir ArchivoGerardo Hernandez Garmendia0% (1)
- Memoria Descriptiva AcchaDocument4 pagesMemoria Descriptiva AcchaJhenner Porras GalloNo ratings yet
- Ley Hooke fuerza deformaciónDocument14 pagesLey Hooke fuerza deformaciónPepona Paz Munizaga100% (1)
- PDF Gaita Zuliana Taller - CompressDocument20 pagesPDF Gaita Zuliana Taller - CompressAngel Benicio MontielNo ratings yet
- Azavel & CazzDocument9 pagesAzavel & CazzDiego Diaz UcedaNo ratings yet
- Triptico CancerDocument2 pagesTriptico CancerdenisguilleNo ratings yet
- Defensa ribereña Huaraz-2018Document79 pagesDefensa ribereña Huaraz-2018Niagq GutYesNo ratings yet
- Practica LuceroDocument32 pagesPractica LuceroLucero Espinoza GarcíaNo ratings yet