You might also like
- Uso Del PolímetroDocument5 pagesUso Del PolímetroMiguel Angel Ibars FortuñoNo ratings yet
- Se Trata Del Uso Del MultimetroDocument26 pagesSe Trata Del Uso Del MultimetroKaren Donoso JaraNo ratings yet
- Didactic Katalog 07 Es Monitor PDFDocument316 pagesDidactic Katalog 07 Es Monitor PDFHector RamónNo ratings yet
- Laboratorio 03 Transmisores de PresionDocument30 pagesLaboratorio 03 Transmisores de PresionMauro GerardoNo ratings yet
- Eler11 PDFDocument8 pagesEler11 PDFAbraham Sanchez DelCampoNo ratings yet
- Examen Final MF - 0825 - 2 29 de Octubre 2015Document4 pagesExamen Final MF - 0825 - 2 29 de Octubre 2015enriqueNo ratings yet
- Control Digital de Iluminación con DALIDocument12 pagesControl Digital de Iluminación con DALIedgardoboieroNo ratings yet
- Sistemas Electronicos para Control de MotoresDocument3 pagesSistemas Electronicos para Control de MotoresJulioNo ratings yet
- Gestión de Proyectos de TelecomunicacionesDocument7 pagesGestión de Proyectos de TelecomunicacionesJose Armando Ela NchamaNo ratings yet
- Laboratorio 02 Transmisores de NivelDocument23 pagesLaboratorio 02 Transmisores de NivelMauro GerardoNo ratings yet
- Guía de La Aparamenta de Media TensiónDocument28 pagesGuía de La Aparamenta de Media TensiónRodrigoNo ratings yet
- Electricidad AutomotrizDocument3 pagesElectricidad AutomotrizGustavo Adolfo Apango MéndezNo ratings yet
- GradSup Energías Renovables CISERDocument4 pagesGradSup Energías Renovables CISERaquiles1967100% (1)
- Amplificación ICTDocument2 pagesAmplificación ICTtxoskeNo ratings yet
- Test de Mecánica BásicaDocument2 pagesTest de Mecánica BásicaJose PerezNo ratings yet
- Laboratorio 01 Instrumentacion-IndustrialDocument16 pagesLaboratorio 01 Instrumentacion-IndustrialMauro GerardoNo ratings yet
- Jose Luis Delgado - PLC (Trabajo Escrito)Document19 pagesJose Luis Delgado - PLC (Trabajo Escrito)Manuel ValdésNo ratings yet
- Supuesto Practico Electricista Juntaex Marzo 2011Document7 pagesSupuesto Practico Electricista Juntaex Marzo 2011flori16No ratings yet
- Presentacion de Motores A Pasos y ServomotoresDocument13 pagesPresentacion de Motores A Pasos y Servomotoresmarieth ruiz lopezNo ratings yet
- PolimetroDocument1 pagePolimetroNATLAIA50% (2)
- Lab S01 Circuito ElectricoDocument30 pagesLab S01 Circuito ElectricoSilvio Rossmel Saldivar CabreraNo ratings yet
- Sensor de Temperatura PDFDocument16 pagesSensor de Temperatura PDFJuan Luis Uribe ArellanoNo ratings yet
- PG Maquinas Electricas 2ºIEA 14-15Document50 pagesPG Maquinas Electricas 2ºIEA 14-15Edison CatotaNo ratings yet
- Curso de Automatizacion IndustrialDocument2 pagesCurso de Automatizacion IndustrialLUIS ICHAICOTO BONCANCANo ratings yet
- CUESTIONARIOTEMA5Document8 pagesCUESTIONARIOTEMA5Pedro Castiblanco100% (1)
- Test 2 - Transmisión de Datos (Medios Guiados)Document4 pagesTest 2 - Transmisión de Datos (Medios Guiados)Ciber GatuxNo ratings yet
- Libro ElectrotecniaDocument29 pagesLibro ElectrotecniaFélix ChNo ratings yet
- Guía de Diodos y TransistoresDocument50 pagesGuía de Diodos y TransistoresNelson Lopez RiveraNo ratings yet
- Cap - 01 Conceptos Basicos ElectricidadDocument83 pagesCap - 01 Conceptos Basicos ElectricidadDARWIN CHELENo ratings yet
- Redes de DatosDocument60 pagesRedes de DatosGio Calderón RodríguezNo ratings yet
- Ejercicio de Test AutomatismosDocument7 pagesEjercicio de Test AutomatismosAnonymous BEAHDwiEkNo ratings yet
- ElectroneumaticaDocument5 pagesElectroneumaticaLuis Miguel BarrenoNo ratings yet
- Instalaciones ElectricasDocument7 pagesInstalaciones ElectricasjonatanNo ratings yet
- Solucionario Electrotecnia UD4 PDFDocument4 pagesSolucionario Electrotecnia UD4 PDFLoccoNo ratings yet
- Accionamiento de barreras automáticas en pasos a nivelDocument8 pagesAccionamiento de barreras automáticas en pasos a nivelerica mullerNo ratings yet
- El Taller de Mecanica AutomotrizDocument2 pagesEl Taller de Mecanica Automotrizfloreto lobatonNo ratings yet
- Ejercicios Tema 5 IctDocument1 pageEjercicios Tema 5 IctJota GaleanoNo ratings yet
- Uf0890 Montaje de Instalaciones Automatizadas OnlineDocument8 pagesUf0890 Montaje de Instalaciones Automatizadas OnlineJosé Miguel Carbó MarínNo ratings yet
- Procesos Del Mantenimiento ElectronicoDocument13 pagesProcesos Del Mantenimiento Electronicoandres solis100% (1)
- Elecetricidad y ElectronicaDocument114 pagesElecetricidad y ElectronicaOlvera Cortés RicardoNo ratings yet
- Seguridad reparación vehículos eléctricos e híbridosDocument5 pagesSeguridad reparación vehículos eléctricos e híbridosBarrikelo Cash BerryNo ratings yet
- Exam TEMA 1 CON SOLUCIONESDocument7 pagesExam TEMA 1 CON SOLUCIONESlorentiaNo ratings yet
- Tarifa BAXI 2018Document292 pagesTarifa BAXI 2018g2666942No ratings yet
- Representacion de Circuitos Electricos IndustrialesDocument15 pagesRepresentacion de Circuitos Electricos IndustrialesMS ZVNo ratings yet
- Acs 355 PDFDocument16 pagesAcs 355 PDFchase200385No ratings yet
- Ud01 SCADocument46 pagesUd01 SCAasturias2012No ratings yet
- Equipos de Medida y Diagnosis Sca Ruben Cabrero MartinDocument8 pagesEquipos de Medida y Diagnosis Sca Ruben Cabrero MartinRubén Cabrero100% (2)
- Himel IctDocument138 pagesHimel IctRoberto Mantiñan RuanovaNo ratings yet
- 7 TriacDocument18 pages7 TriacDaniel scanioNo ratings yet
- Elaboracion de La Documentacion Tecnica Segun El Rebt para La Instalacion de Locales Cert 5162Document3 pagesElaboracion de La Documentacion Tecnica Segun El Rebt para La Instalacion de Locales Cert 5162Víctor RojasNo ratings yet
- Aparamenta EléctricaDocument22 pagesAparamenta Eléctricaluighi999No ratings yet
- Diagramas de BodeDocument12 pagesDiagramas de BodeRenzo MahrNo ratings yet
- Circuitos mixtos: Análisis de componentes en serie y paraleloDocument10 pagesCircuitos mixtos: Análisis de componentes en serie y paraleloFrancisco Andrès Sepúlveda Vàsquez100% (1)
- Instrucciones de Uso Truma CP Plus (ES)Document24 pagesInstrucciones de Uso Truma CP Plus (ES)Alexisxxl100% (1)
- Mantenimiento de infraestructuras de redes locales de datos. ELES0209From EverandMantenimiento de infraestructuras de redes locales de datos. ELES0209No ratings yet
- Mantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409From EverandMantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409No ratings yet
- Batería De Estado Sólido: Solo cuando lleguen las baterías de estado sólido te comprarás un coche eléctricoFrom EverandBatería De Estado Sólido: Solo cuando lleguen las baterías de estado sólido te comprarás un coche eléctricoNo ratings yet
- El Perfil de Los Que Queman El Bosque en EspañaDocument28 pagesEl Perfil de Los Que Queman El Bosque en Españacaraconejo100% (1)
- Presentacion Power para HoyDocument25 pagesPresentacion Power para HoyJuan Mejia AburtoNo ratings yet
- Incendios Forestales El Fin de La ImpunidadDocument32 pagesIncendios Forestales El Fin de La ImpunidadTUZERONo ratings yet
- 012 Insp ARFF Rev 02 SpaDocument51 pages012 Insp ARFF Rev 02 SpaTUZERONo ratings yet
- Psicologia en La EmergenciaDocument22 pagesPsicologia en La EmergenciaMirko Vela ReaNo ratings yet
- PDF Manual Practico Incendios 2007Document36 pagesPDF Manual Practico Incendios 2007Marcos Sebastian Franco83% (6)
- Bomberos 11Document58 pagesBomberos 11Agustin Carranza100% (1)
- Proteccion Contra Incendios 2Document82 pagesProteccion Contra Incendios 2Agustin Carranza100% (1)
- Bain 01Document1 pageBain 01Pempo MontoyaNo ratings yet
- Extractores de HumoDocument12 pagesExtractores de HumoCristian Jorquera VargasNo ratings yet
- Mangueras ChorrosDocument41 pagesMangueras ChorrosCamilo Londoño Giraldo100% (2)
- Bain 03Document1 pageBain 03Pempo MontoyaNo ratings yet
- Uso y Manejo de ExTINTORESDocument24 pagesUso y Manejo de ExTINTORESWilmer Acosta Villena100% (2)
- Extractores de HumoDocument12 pagesExtractores de HumoCristian Jorquera VargasNo ratings yet
- Bain 06Document1 pageBain 06Pempo MontoyaNo ratings yet
- Sistemas FrigoríficosDocument62 pagesSistemas FrigoríficosAquiles Vaeza100% (1)
- Bain 04Document1 pageBain 04Pempo MontoyaNo ratings yet
- Gato DumasDocument2 pagesGato DumasPempo MontoyaNo ratings yet
- Gato DumasDocument2 pagesGato DumasPempo MontoyaNo ratings yet
- Apunte Generadores de Pulso y Tem Eln2Document53 pagesApunte Generadores de Pulso y Tem Eln2Carlos FernandezNo ratings yet
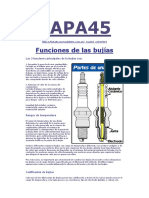
- D-Funciones de Las Bujias PDFDocument2 pagesD-Funciones de Las Bujias PDFPempo MontoyaNo ratings yet
- L LucesDocument28 pagesL LuceswalterNo ratings yet
- Reguladores de tensión con diodo ZenerDocument39 pagesReguladores de tensión con diodo ZenerJuan Carlos MartinezNo ratings yet
- Sistemas FrigoríficosDocument62 pagesSistemas FrigoríficosAquiles Vaeza100% (1)
- Curso de Electricidad PDFDocument84 pagesCurso de Electricidad PDFWilfredo MedinaNo ratings yet
- H-Medidas Electric As en AutomocionDocument9 pagesH-Medidas Electric As en AutomocionMarvin Nta DgzNo ratings yet
- Manual para Ado de MotoresDocument60 pagesManual para Ado de MotoresJorge Eduardo González Martínez100% (2)
- D-Funciones de Las Bujias PDFDocument2 pagesD-Funciones de Las Bujias PDFPempo MontoyaNo ratings yet
- Trabajo de ReligiónDocument345 pagesTrabajo de ReligiónSofía SantillánNo ratings yet
- Protocolo Del Test TeaDocument28 pagesProtocolo Del Test TeaMaria Ventura ParedesNo ratings yet
- Procedimiento Rescate Montacargas T5-CRDocument19 pagesProcedimiento Rescate Montacargas T5-CRluis carvajalNo ratings yet
- Informe de JunioDocument4 pagesInforme de Juniojilmer lopez reucheNo ratings yet
- Planificación gubernamental corto y mediano plazoDocument62 pagesPlanificación gubernamental corto y mediano plazoSuzet Jaillita QuiñonesNo ratings yet
- Ejercicios IngesoftDocument5 pagesEjercicios IngesoftAndres David Guevara JaramilloNo ratings yet
- ATACODocument29 pagesATACOEduardo MebiusNo ratings yet
- 100000E18P TurbomaquinasDocument5 pages100000E18P TurbomaquinasAlex ChuquijaNo ratings yet
- Husky 1800 SDocument36 pagesHusky 1800 SAbdulla Ahmed AbdullaNo ratings yet
- Fundamentos RFID PresentacionDocument27 pagesFundamentos RFID PresentacionSergio E. Hernandez R.100% (1)
- Tema 6 Teoría Unid. EstratigraficasDocument22 pagesTema 6 Teoría Unid. EstratigraficasCarlos Gonzalez VergaraNo ratings yet
- Presentación Del Curso Amparo I - Primavera 2021 SOJ1146ODocument57 pagesPresentación Del Curso Amparo I - Primavera 2021 SOJ1146ObrisNo ratings yet
- Tarea Notas Al Margen y ResumenDocument9 pagesTarea Notas Al Margen y ResumenAndrea Noelia Miranda ChipanaNo ratings yet
- Lab 1 GranulometriaDocument32 pagesLab 1 Granulometriajhampier tito ramirezNo ratings yet
- Capítulo 2Document58 pagesCapítulo 2Antony Alexander CamalleNo ratings yet
- Fuente de alimentación regulada triple 1,2V-24V con salidas fijas de 5V y 12VDocument35 pagesFuente de alimentación regulada triple 1,2V-24V con salidas fijas de 5V y 12VFacundo HerreraNo ratings yet
- Mezclado RaDocument2 pagesMezclado RaEduardoMartinMarquezNo ratings yet
- Acondicionadores de TejidoDocument18 pagesAcondicionadores de Tejidogdvrchpx52No ratings yet
- Control horas maquina excavadoraDocument35 pagesControl horas maquina excavadoraWalter MelitonNo ratings yet
- 1.estudiantes - PLANEACION DIDACTICA - Desarrollo Potencial Creativo. Enero-Junio. 2020Document9 pages1.estudiantes - PLANEACION DIDACTICA - Desarrollo Potencial Creativo. Enero-Junio. 2020JesusGutierrezMtzNo ratings yet
- Trascendencia de La Gestin de Los Servicios de Ti en La Vida UniversitariaDocument19 pagesTrascendencia de La Gestin de Los Servicios de Ti en La Vida UniversitariaRobins Alex Landazuri QuinonesNo ratings yet
- Microeconomia Preguntas de Repaso Capitulo 4 1c Leydi GarnicaDocument6 pagesMicroeconomia Preguntas de Repaso Capitulo 4 1c Leydi GarnicaFatima GarnicaNo ratings yet
- Empal MeDocument14 pagesEmpal MeAbel Trabol100% (1)
- Trabajo Grupal Unidad 1 200610 815 Teoría de Conjuntos, Elementos, Propiedades.Document27 pagesTrabajo Grupal Unidad 1 200610 815 Teoría de Conjuntos, Elementos, Propiedades.nelsonNo ratings yet
- 00 Alivio de Las Situaciones Dificiles y Del Sufrimiento en La Terminalidad Editorial, ContenidoprimerasDocument12 pages00 Alivio de Las Situaciones Dificiles y Del Sufrimiento en La Terminalidad Editorial, ContenidoprimerasCelia Salmeron LopezNo ratings yet
- Uso de Herramiento Diagnostico - ItcmDocument43 pagesUso de Herramiento Diagnostico - ItcmRenato LopezNo ratings yet
- Metodología Wilson Grupo7Document3 pagesMetodología Wilson Grupo7Jean JaramilloNo ratings yet
- 1cuidar Al Que Cuida - Red PROSAMIC-BENTOLILADocument82 pages1cuidar Al Que Cuida - Red PROSAMIC-BENTOLILAFlavia Chiarelli100% (1)
- Pauta InacapDocument7 pagesPauta InacapRobinson100% (1)
- Examen Diagnostico de Ciencias III Quimica ALUMNOSDocument2 pagesExamen Diagnostico de Ciencias III Quimica ALUMNOSLupita GallegosNo ratings yet