You might also like
- Tipos de Energia (Artigo) - Khan AcademyDocument5 pagesTipos de Energia (Artigo) - Khan AcademyAnonymous t9tLb3WgNo ratings yet
- Socialismo - Toda MatériaDocument4 pagesSocialismo - Toda MatériaAnonymous t9tLb3WgNo ratings yet
- Informações Importantes Sobre Salt - Keshe Foundation WikiDocument3 pagesInformações Importantes Sobre Salt - Keshe Foundation WikiAnonymous t9tLb3WgNo ratings yet
- ABC Da Eletrônica 11 PDFDocument45 pagesABC Da Eletrônica 11 PDFArnaldo JúniorNo ratings yet
- Repetidora Rural - UV-RapidoDocument3 pagesRepetidora Rural - UV-RapidoAnonymous t9tLb3Wg100% (1)
- Datasheet - HK w25x10bl 3140476Document2 pagesDatasheet - HK w25x10bl 3140476Anonymous t9tLb3WgNo ratings yet
- Ondas Estacionárias (TEL010)Document8 pagesOndas Estacionárias (TEL010)Anonymous t9tLb3WgNo ratings yet
- Frequencias de Aviação - UV-RapidoDocument4 pagesFrequencias de Aviação - UV-RapidoAnonymous t9tLb3WgNo ratings yet
- Guia completo do módulo SA818 UHFDocument12 pagesGuia completo do módulo SA818 UHFAnonymous t9tLb3WgNo ratings yet
- Os 4 Principais GANSes e Aminoácidos - Keshe Foundation WikiDocument4 pagesOs 4 Principais GANSes e Aminoácidos - Keshe Foundation WikiAnonymous t9tLb3WgNo ratings yet
- Abc 13Document39 pagesAbc 13Anonymous t9tLb3WgNo ratings yet
- Kit de Tábua de Pão - Crie Seu Próprio Clark ZapperDocument1 pageKit de Tábua de Pão - Crie Seu Próprio Clark ZapperAnonymous t9tLb3WgNo ratings yet
- Retirada de objeto autorizadaDocument1 pageRetirada de objeto autorizadaVitor Borges75% (8)
- Informações Importantes Sobre o Sal - Keshe Foundation WikiDocument3 pagesInformações Importantes Sobre o Sal - Keshe Foundation WikiAnonymous t9tLb3WgNo ratings yet
- Circuito Gerador de Sinal Com 555 PDFDocument1 pageCircuito Gerador de Sinal Com 555 PDFPaulo Henrique SNo ratings yet
- Procedimento de Atualização Winflash - Rev0.0 PDFDocument3 pagesProcedimento de Atualização Winflash - Rev0.0 PDFticamargo01No ratings yet
- Medidor de Carga Da Bateria para CarrosDocument4 pagesMedidor de Carga Da Bateria para CarrosAnonymous t9tLb3WgNo ratings yet
- Procedimento de Atualização Winflash - Rev0.0 PDFDocument3 pagesProcedimento de Atualização Winflash - Rev0.0 PDFticamargo01No ratings yet
- 2 Channel Ir Remote Control Only 2 Transistor - Et DiscoverDocument4 pages2 Channel Ir Remote Control Only 2 Transistor - Et DiscoverAnonymous t9tLb3WgNo ratings yet
- ListaRLC EL02DDocument8 pagesListaRLC EL02DAnonymous t9tLb3WgNo ratings yet
- Verbos em Espanhol (Verbos en Español) - Toda MatériaDocument9 pagesVerbos em Espanhol (Verbos en Español) - Toda MatériaAnonymous t9tLb3WgNo ratings yet
- 3 Formas de Curar Fibrilação Atrial Naturalmente CoracaoDocument21 pages3 Formas de Curar Fibrilação Atrial Naturalmente CoracaoAnonymous t9tLb3WgNo ratings yet
- Redação PDFDocument1 pageRedação PDFAnonymous t9tLb3WgNo ratings yet
- Marlon Nardi Walendorff - Como Fazer Um Aquecedor Indutivo de Maneira Fácil Com o Funcionamento ExplicadoDocument4 pagesMarlon Nardi Walendorff - Como Fazer Um Aquecedor Indutivo de Maneira Fácil Com o Funcionamento ExplicadoAnonymous t9tLb3WgNo ratings yet
- Lista de Tps Atualizados Star One c2 - c4 70w Banda Ku - Brothers Do AzDocument1 pageLista de Tps Atualizados Star One c2 - c4 70w Banda Ku - Brothers Do AzAnonymous t9tLb3Wg100% (1)
- Filtro Passivo Passa Faixa Ou Passa BandaDocument7 pagesFiltro Passivo Passa Faixa Ou Passa BandaAnonymous t9tLb3WgNo ratings yet
- Esquema de Chocadeira Eletrônica Com LM741, MOC3041 e NTCDocument5 pagesEsquema de Chocadeira Eletrônica Com LM741, MOC3041 e NTCAnonymous t9tLb3WgNo ratings yet
- Temas ENEM 1998-2017Document2 pagesTemas ENEM 1998-2017Royals0% (1)
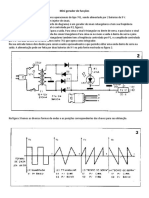
- Mini Gerador de FuncoesDocument2 pagesMini Gerador de FuncoesAnonymous t9tLb3WgNo ratings yet
- Filtro Passivo Passa Baixas RLDocument6 pagesFiltro Passivo Passa Baixas RLAnonymous t9tLb3WgNo ratings yet
- Disciplinas do Curso de Engenharia MecânicaDocument35 pagesDisciplinas do Curso de Engenharia MecânicaRafael FariaNo ratings yet
- Manua - Eletronica de PotenciaDocument47 pagesManua - Eletronica de PotenciaFrancisco MartinsNo ratings yet
- Aulão EEAR FísicaDocument7 pagesAulão EEAR FísicaRenan Schmidt FariaNo ratings yet
- Projeto de instalação elétrica residencial em ChókwèDocument17 pagesProjeto de instalação elétrica residencial em ChókwèAmerco Tivane100% (2)
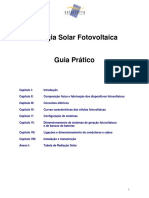
- Guia Pratico Energia Solar Fotovoltaica SolarterraDocument34 pagesGuia Pratico Energia Solar Fotovoltaica SolarterraEVANDRO FRAGA100% (1)
- Pré Relatório 1 - CircuitosDocument3 pagesPré Relatório 1 - CircuitosMonique MachadoNo ratings yet
- 56fd6937060f6 PDFDocument7 pages56fd6937060f6 PDFEBookexcelNo ratings yet
- Circuitos Elétricos II - Expressões e EnergiaDocument5 pagesCircuitos Elétricos II - Expressões e EnergiaPEDRO HENRIQUENo ratings yet
- Codigo de Fallas NavistarDocument4 pagesCodigo de Fallas Navistarploik55No ratings yet
- Introdução ao Scilab com aplicações de engenharia elétricaDocument16 pagesIntrodução ao Scilab com aplicações de engenharia elétricaRodrigo KleytonNo ratings yet
- Lab 01Document4 pagesLab 01Bruno Santos de MirandaNo ratings yet
- Eletrodinâmica 08.09.23 - 10.10.23Document288 pagesEletrodinâmica 08.09.23 - 10.10.23Jaime JoséNo ratings yet
- Sensores de Proximidade Indutivos Guia RápidoDocument104 pagesSensores de Proximidade Indutivos Guia RápidohinperionNo ratings yet
- Motor de Corente ContínuaDocument27 pagesMotor de Corente ContínuapedroNo ratings yet
- Ventiladores MecânicosDocument40 pagesVentiladores MecânicosMAXWELL OLIVEIRA DOS SANTOSNo ratings yet
- Check List ElétricoDocument2 pagesCheck List ElétricoleandrosouzasjcNo ratings yet
- CMX 2Document4 pagesCMX 2Manutencao MPDRNo ratings yet
- 88-Texto Do Artigo-4591-1-10-20190122Document5 pages88-Texto Do Artigo-4591-1-10-20190122Edivaldo JúniorNo ratings yet
- Aula 19Document30 pagesAula 19Thamyres AraújoNo ratings yet
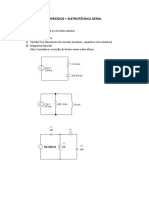
- Exercícios Eletrotécnica GeralDocument4 pagesExercícios Eletrotécnica GeralDiego Rocha0% (1)
- Lista de exercícios de associação de resistoresDocument3 pagesLista de exercícios de associação de resistoresMarcos Junior SilvaNo ratings yet
- Como Testar o Sensor de Posição Do AceleradorDocument10 pagesComo Testar o Sensor de Posição Do AceleradorJosué AmattiNo ratings yet
- Representação Fasorial em Circuitos TrifasicosDocument15 pagesRepresentação Fasorial em Circuitos TrifasicosdavidNo ratings yet
- Alicate Amperímetro Digital: Manual de InstruçõesDocument71 pagesAlicate Amperímetro Digital: Manual de InstruçõesGordinhorsNo ratings yet
- Manual Traduzido Do T.S.I vPad-ES™ (Manual Completo)Document106 pagesManual Traduzido Do T.S.I vPad-ES™ (Manual Completo)algumacoisaquepensaNo ratings yet
- Circuitos trifásicos em componentes simétricasDocument39 pagesCircuitos trifásicos em componentes simétricasFelipe VasconcellosNo ratings yet
- Reparação de Notebooks - Circuito de Isolamento de Proteção HP4321S 4326s e Análise .Document8 pagesReparação de Notebooks - Circuito de Isolamento de Proteção HP4321S 4326s e Análise .Gerson SoaresNo ratings yet
- Geradores de Corrente ContínuaDocument17 pagesGeradores de Corrente ContínuaHelena FernandesNo ratings yet
- Lista1 EnsitecDocument4 pagesLista1 EnsitecGraciele Maeoka0% (1)
- TRANSIÇÃO AÉREA SUBTERRÂNEA - 138kV - ESTRUTURA MÚLTIPLADocument14 pagesTRANSIÇÃO AÉREA SUBTERRÂNEA - 138kV - ESTRUTURA MÚLTIPLARoberto Diniz Thomaz JúniorNo ratings yet