You might also like
- CD30/35 MANUAL & Start Guide: For Use On PPM Electromagnetic Equipment VF Advance VF Premier Mini VF VFX MagnatronDocument21 pagesCD30/35 MANUAL & Start Guide: For Use On PPM Electromagnetic Equipment VF Advance VF Premier Mini VF VFX Magnatronkawa saki75% (4)
- Voice and The Actor Cicely BerryDocument111 pagesVoice and The Actor Cicely Berrymrdise100% (15)
- Tutorial Questions-Week 1-6Document9 pagesTutorial Questions-Week 1-6Vincent KohNo ratings yet
- The Super Mind Music LibraryDocument33 pagesThe Super Mind Music LibraryMindwaveVincent100% (1)
- Answers To Test Yourself Questions: Topic 8Document7 pagesAnswers To Test Yourself Questions: Topic 8Abel CruzNo ratings yet
- O Level Physics Formula SheetDocument2 pagesO Level Physics Formula SheeteltytanNo ratings yet
- Scalar Wave Medicine PDFDocument20 pagesScalar Wave Medicine PDFsadiku100% (2)
- F.3 Chemistry Exercise 3 (Atoms) (Q&A)Document4 pagesF.3 Chemistry Exercise 3 (Atoms) (Q&A)Simon100% (1)
- TA The Ascension & The 144 - Crystal GridDocument16 pagesTA The Ascension & The 144 - Crystal Gridtommytroniqu3100% (3)
- Telepathic SchumannDocument47 pagesTelepathic SchumannJesse Lee Alexander100% (1)
- Chemical Bonding-NotesDocument47 pagesChemical Bonding-NotesHimanshu Meena100% (3)
- Secrets of Radionics Pt.1 - Nexus 1991 PDFDocument3 pagesSecrets of Radionics Pt.1 - Nexus 1991 PDFJorgeDaemonNo ratings yet
- EM Fields As Structure-Function Zeitgebers in Biological Systems Environmental Orchestrations of Morphogenesis and Consciousness PDFDocument9 pagesEM Fields As Structure-Function Zeitgebers in Biological Systems Environmental Orchestrations of Morphogenesis and Consciousness PDFEstácio NetoNo ratings yet
- Control of Vib-ShockDocument35 pagesControl of Vib-Shockdanial001100% (1)
- Transformation of Functions MsDocument4 pagesTransformation of Functions MssalmasomaNo ratings yet
- Vibration Analysis in Reciprocating CompressorsDocument11 pagesVibration Analysis in Reciprocating Compressorsakamalapuri388No ratings yet
- 2009 RJCMS - Math Revision NotesDocument129 pages2009 RJCMS - Math Revision NotesweewsNo ratings yet
- HKDSE Notes (Physics)Document111 pagesHKDSE Notes (Physics)jared liNo ratings yet
- Time Dependent Schrodinger EquationDocument26 pagesTime Dependent Schrodinger EquationLearning Scholar100% (1)
- Chem QuizDocument7 pagesChem Quizerwin cahanapNo ratings yet
- 2019 JC1 H2 Math Term 2 Revision Test (Questions)Document1 page2019 JC1 H2 Math Term 2 Revision Test (Questions)Timothy HandokoNo ratings yet
- Chapter4: Exponential and Logarithmic Functions 4.1: Exponential FunctionsDocument10 pagesChapter4: Exponential and Logarithmic Functions 4.1: Exponential FunctionsReema AlrasheedNo ratings yet
- Resonant Column TestDocument9 pagesResonant Column TestRana SenNo ratings yet
- NJC Sequence and Series Lecture Notes and Tutorial Teachers EditionDocument20 pagesNJC Sequence and Series Lecture Notes and Tutorial Teachers EditionbhimabiNo ratings yet
- Phy SamplePaper Paper1 2 eDocument48 pagesPhy SamplePaper Paper1 2 e2233haNo ratings yet
- Physics Chapter 5 Revision Notes For ExamDocument2 pagesPhysics Chapter 5 Revision Notes For ExammrdarkknighificationNo ratings yet
- VJC JC1 H2 Math Revision Package 2023Document56 pagesVJC JC1 H2 Math Revision Package 2023vincesee85No ratings yet
- Uace Pre-Mock 2022 Final 2Document5 pagesUace Pre-Mock 2022 Final 2nasasira DanielNo ratings yet
- Module-1 - Engineering PhysicsDocument40 pagesModule-1 - Engineering PhysicsT. VARMANo ratings yet
- ElectrochemistyDocument21 pagesElectrochemistyAagash PranavNo ratings yet
- Physics Binder 1Document2,790 pagesPhysics Binder 1tbs0sisirakumaraNo ratings yet
- Work Power Energy Faculty Copy Yw3bPNODocument92 pagesWork Power Energy Faculty Copy Yw3bPNOSamridh GuptaNo ratings yet
- Differentiation FormulasDocument1 pageDifferentiation Formulasslipper_crazy5335No ratings yet
- Chapter 4 Chemical Bonds RozainaDocument87 pagesChapter 4 Chemical Bonds RozainaZAHINNo ratings yet
- HCI H3 PHY 9811 EoMP QP PDFDocument12 pagesHCI H3 PHY 9811 EoMP QP PDFLeng RyanNo ratings yet
- Answers: 1.1 Length and TimeDocument34 pagesAnswers: 1.1 Length and TimeL LHNo ratings yet
- 2006 JC 1 H2 JCT & Promo - Differential EquationsDocument3 pages2006 JC 1 H2 JCT & Promo - Differential EquationsOccamsRazorNo ratings yet
- Allen Major 1 QPDocument23 pagesAllen Major 1 QPelavarasanipadNo ratings yet
- Ap Chem - Chapter 1 Reading GuideDocument21 pagesAp Chem - Chapter 1 Reading Guideapi-475547739No ratings yet
- Coupled Pendulums: Experiment 4Document5 pagesCoupled Pendulums: Experiment 4Sayan BiswasNo ratings yet
- Specimen Paper 1 PhyDocument23 pagesSpecimen Paper 1 Phynewtonian_physicsNo ratings yet
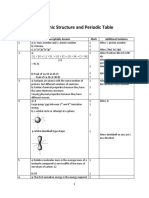
- Atomic Structure and Periodic Table Mark SchemeDocument5 pagesAtomic Structure and Periodic Table Mark SchemeDiyaNo ratings yet
- Universal Law of Gravitation or Newton'S Law of GravitationDocument8 pagesUniversal Law of Gravitation or Newton'S Law of Gravitationchhabra navdeepNo ratings yet
- Topic 1 - Measurement and Uncertainties - IB PhysicsDocument9 pagesTopic 1 - Measurement and Uncertainties - IB PhysicsAzzahra Yeasmin SaikaNo ratings yet
- Final Quantum 2020Document2 pagesFinal Quantum 2020ANo ratings yet
- LorentzDocument10 pagesLorentzMunir AslamNo ratings yet
- 086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)Document4 pages086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)McDonald Whites JonesNo ratings yet
- 4047 SP 01Document6 pages4047 SP 01MaverickNo ratings yet
- CH 8 - Multiple IntegralsDocument48 pagesCH 8 - Multiple IntegralsSolewinnerNo ratings yet
- The Key: Units of Reaction Rate Are Unit of Concentration Divided by The Unit of Time (Mol LDocument31 pagesThe Key: Units of Reaction Rate Are Unit of Concentration Divided by The Unit of Time (Mol LSachin KumarNo ratings yet
- Fiitjee: Solutions To Jee (Advanced) - 2014Document35 pagesFiitjee: Solutions To Jee (Advanced) - 2014Tarun GuptaNo ratings yet
- Notes Reversible Reactions and EquilibriumDocument8 pagesNotes Reversible Reactions and EquilibriumThomas PeraltaNo ratings yet
- A Level H2 Paper 2Document6 pagesA Level H2 Paper 2newtonian_physics100% (1)
- Topic 4 WorksheetDocument45 pagesTopic 4 WorksheetFrkn100% (1)
- Exercise 1-Merged PDFDocument59 pagesExercise 1-Merged PDFDev PuriNo ratings yet
- 4016 Mathematics Topic 1: Numbers and AlgebraDocument7 pages4016 Mathematics Topic 1: Numbers and AlgebraMohammad AshfaqNo ratings yet
- Paper 1BDocument14 pagesPaper 1Bw cooNo ratings yet
- Quiz 2 Formula SheetDocument2 pagesQuiz 2 Formula SheetdawnNo ratings yet
- 2015 PJC Prelim Paper 1 SolutionsDocument15 pages2015 PJC Prelim Paper 1 SolutionsnasyrahNo ratings yet
- Circular Motion Level 1Document9 pagesCircular Motion Level 1AGNIBESH BHANJANo ratings yet
- Text Books: Physical Chemistry (I&II), 6 Edition, T. M. Leung & C. C. Lee, Fillans Inorganic Chemistry, 6 Edition, T. M. Leung & C. C. Lee, FillansDocument4 pagesText Books: Physical Chemistry (I&II), 6 Edition, T. M. Leung & C. C. Lee, Fillans Inorganic Chemistry, 6 Edition, T. M. Leung & C. C. Lee, FillanssachinkurhekarNo ratings yet
- Space Study NotesDocument46 pagesSpace Study NotesMadeleine ThomasNo ratings yet
- MPHG2009-Chapter 6 WavesDocument40 pagesMPHG2009-Chapter 6 WavesMohd Khairul Anuar100% (9)
- Extra Practice Mixed Gas Law Problems Answers PDFDocument4 pagesExtra Practice Mixed Gas Law Problems Answers PDFAgness CheweNo ratings yet
- MJC 2010 H2 Physics Prelim Paper 3xDocument21 pagesMJC 2010 H2 Physics Prelim Paper 3xcjcsucksNo ratings yet
- A Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsFrom EverandA Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsNo ratings yet
- Tables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39From EverandTables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39No ratings yet
- 9.1 SHMReviewDocument4 pages9.1 SHMReviewlunareclipse18No ratings yet
- Learncbse - in-nCERT Exemplar Problems Class 11 Physics Chapter 13 OscillationsDocument29 pagesLearncbse - in-nCERT Exemplar Problems Class 11 Physics Chapter 13 OscillationsRizul thakurNo ratings yet
- Simple Harmonic Motion: Oscillations & WavesDocument10 pagesSimple Harmonic Motion: Oscillations & WavesRangaNo ratings yet
- Articulo4 2005Document13 pagesArticulo4 2005Klaus-BärbelvonMolchhagenNo ratings yet
- Lesson Plan: Lesson: Projectiles Without Air ResistanceDocument4 pagesLesson Plan: Lesson: Projectiles Without Air ResistanceeltytanNo ratings yet
- Lesson Plan: © 2003 Ministry of Education Malaysia. All Rights ReservedDocument3 pagesLesson Plan: © 2003 Ministry of Education Malaysia. All Rights ReservedeltytanNo ratings yet
- Lesson Plan: Lesson: Comparing Various Types of CollisionsDocument3 pagesLesson Plan: Lesson: Comparing Various Types of CollisionseltytanNo ratings yet
- Lesson Plan: Lesson: Units and DimensionsDocument5 pagesLesson Plan: Lesson: Units and Dimensionseltytan100% (1)
- Lesson Plan: Lesson: Rectilinear Motion: Graphical Representation and InterpretationDocument3 pagesLesson Plan: Lesson: Rectilinear Motion: Graphical Representation and InterpretationeltytanNo ratings yet
- AL Applied Mathematics 1989 Paper1+2 (E)Document7 pagesAL Applied Mathematics 1989 Paper1+2 (E)eltytanNo ratings yet
- Phy Graphical Method P2Document1 pagePhy Graphical Method P2eltytanNo ratings yet
- Phy Electronics P2Document5 pagesPhy Electronics P2eltytanNo ratings yet
- AL Applied Mathematics 1987 Paper1+2 (E)Document6 pagesAL Applied Mathematics 1987 Paper1+2 (E)eltytanNo ratings yet
- Phy Radioactivity P2Document2 pagesPhy Radioactivity P2eltytanNo ratings yet
- Phy Radioactivity P22Document5 pagesPhy Radioactivity P22eltytanNo ratings yet
- Electromagnetism: Physics-MC/Electromagnetism/By Lee Siu Hin Page 1 of 3Document3 pagesElectromagnetism: Physics-MC/Electromagnetism/By Lee Siu Hin Page 1 of 3eltytanNo ratings yet
- Electronics: Physics-MC/Electronics/By Lee Siu Hin Page 1 of 11Document11 pagesElectronics: Physics-MC/Electronics/By Lee Siu Hin Page 1 of 11eltytanNo ratings yet
- Electrostatics: Physics-MC/Electrostatics/By Lee Siu Hin Page 1 of 3Document3 pagesElectrostatics: Physics-MC/Electrostatics/By Lee Siu Hin Page 1 of 3eltytanNo ratings yet
- An Undergraduate Study of Harmonic and Parametric Motion of A Simple Spring-Mass System From Motion WaveformsDocument15 pagesAn Undergraduate Study of Harmonic and Parametric Motion of A Simple Spring-Mass System From Motion Waveformssoumengoswami10No ratings yet
- 1.1. Historical Background of NMR Spectroscopy: (Chapter - 01) Introduction 1Document36 pages1.1. Historical Background of NMR Spectroscopy: (Chapter - 01) Introduction 1Amber FatimaNo ratings yet
- DOM2Document7 pagesDOM2ds_shivaNo ratings yet
- Unit-4 OkDocument20 pagesUnit-4 Oksaahasitha 14No ratings yet
- Photonic Laser Propulsion (PLP) : Photon Propulsion Using An Active Resonant Optical CavityDocument10 pagesPhotonic Laser Propulsion (PLP) : Photon Propulsion Using An Active Resonant Optical CavityWael Abdelgadir AbdelazizNo ratings yet
- EV2100 Series Variable Speed Drive: User ManualDocument130 pagesEV2100 Series Variable Speed Drive: User ManualRitakristianti RistiantiNo ratings yet
- PascovibradorDocument4 pagesPascovibradordavidjl_299No ratings yet
- DRIVING PRECAST CONCRETE PILES by Vibration PDFDocument18 pagesDRIVING PRECAST CONCRETE PILES by Vibration PDFRicusNo ratings yet
- Mech Wave Driver Manual (SF-9324) PDFDocument4 pagesMech Wave Driver Manual (SF-9324) PDFrobidjoNo ratings yet
- Phy F111 1015Document4 pagesPhy F111 1015IkshwakNo ratings yet
- Phy PreDocument7 pagesPhy PreNaveen JhaNo ratings yet
- SpectraSensors S2000 ManualDocument92 pagesSpectraSensors S2000 ManualPhilNo ratings yet
- Simple Harmonic Motion, Mechanical Waves, and Sound: PHY01 - General Physics 1 Senior High School DepartmentDocument46 pagesSimple Harmonic Motion, Mechanical Waves, and Sound: PHY01 - General Physics 1 Senior High School DepartmentblablaNo ratings yet
- For New Designs: SSC9522S Data SheetDocument21 pagesFor New Designs: SSC9522S Data Sheetfalla naNo ratings yet
- Prediction of Ground VibrationDocument10 pagesPrediction of Ground VibrationWilkhen ChuraNo ratings yet
- Fluid Motion Energy ConverterDocument16 pagesFluid Motion Energy ConverterAlberto TeodoroNo ratings yet
- Group 1Document6 pagesGroup 1Mart Joseph Seno0% (1)
- QDocument10 pagesQThet Paing Phyoe ecNo ratings yet