You might also like
- Ads 2200 2700 PDFDocument17 pagesAds 2200 2700 PDFPaul Albu100% (1)
- Diagrama cfd-rg880cpDocument14 pagesDiagrama cfd-rg880cpMarvin Leon Alegria100% (1)
- Pioneer Deh-P770mp, Deh-P7700mp, Deh-P7750mp Service ManualDocument19 pagesPioneer Deh-P770mp, Deh-P7700mp, Deh-P7750mp Service ManualOssian Valera PinedaNo ratings yet
- Sony CCD TRV Service ManualDocument23 pagesSony CCD TRV Service ManualPratik GurungNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Philips bdp2100 wk1304 Ver.1.0Document68 pagesPhilips bdp2100 wk1304 Ver.1.0Jeank RivadeneyraNo ratings yet
- v2 Led LCD Screen Panel Repair MIRKODocument213 pagesv2 Led LCD Screen Panel Repair MIRKOErRobert Ch96% (25)
- Signal Conditioning and PC-Based Data Acquisition HandbookDocument123 pagesSignal Conditioning and PC-Based Data Acquisition HandbookLéon SmeetsNo ratings yet
- Service Manual: CD Mechanism Module (S10Mp3)Document25 pagesService Manual: CD Mechanism Module (S10Mp3)roto44No ratings yet
- CRT3582 CX-3166Document27 pagesCRT3582 CX-3166Tai HuatNo ratings yet
- Panasonic Sa-Ht930 Ref-Guide SMDocument23 pagesPanasonic Sa-Ht930 Ref-Guide SMRichard Kxorroloko100% (1)
- Panasonic TH l24c20dDocument39 pagesPanasonic TH l24c20dKingsleen33% (3)
- 945GCT/GZT-M: Page Title of SchematicDocument33 pages945GCT/GZT-M: Page Title of SchematicJean GaroniNo ratings yet
- Sony Kdl-32ex402 Chassis Az1-N - 3a-2 PDFDocument73 pagesSony Kdl-32ex402 Chassis Az1-N - 3a-2 PDFjacques le lay100% (1)
- Pioneer Cx-3240 Crt4050Document31 pagesPioneer Cx-3240 Crt4050boroda2410No ratings yet
- Toyota Audio Component Service Manual CQ-JT1010X CQ-JS6910X Radio With Cassette Tape Player and CDocument42 pagesToyota Audio Component Service Manual CQ-JT1010X CQ-JS6910X Radio With Cassette Tape Player and CAdan DariasNo ratings yet
- Pioneer VSX-417 SchematicDocument24 pagesPioneer VSX-417 SchematicaaakokotNo ratings yet
- Sony CDX L490bDocument38 pagesSony CDX L490bJosue RamirezNo ratings yet
- Pioneer Avh-X7780tv crt5694 SM AdditionalDocument2 pagesPioneer Avh-X7780tv crt5694 SM AdditionalAquino Sound EletrônicaNo ratings yet
- Service Manual: CDX-L480XDocument20 pagesService Manual: CDX-L480Xkeremelekika7No ratings yet
- Ecs 648fx Sf1 Rev 1.0Document34 pagesEcs 648fx Sf1 Rev 1.0cortes920No ratings yet
- 9619 Sanyo LCD-42XF6 Chassis UH4-L Televisor LCD Manual de ServicioDocument50 pages9619 Sanyo LCD-42XF6 Chassis UH4-L Televisor LCD Manual de ServicioNatal2i2No ratings yet
- Autoestereo Pioneer DEH-4090MP DEH-6010MPDocument39 pagesAutoestereo Pioneer DEH-4090MP DEH-6010MPGustavo De la ONo ratings yet
- Philips MonitorDocument15 pagesPhilips Monitordstoic1No ratings yet
- Revision History: Schematics IndexDocument15 pagesRevision History: Schematics IndexMark SorianoNo ratings yet
- Amoi Lc26t1e 32t1e 37t1e 42t1e (ET)Document120 pagesAmoi Lc26t1e 32t1e 37t1e 42t1e (ET)Dimitris ApostolouNo ratings yet
- L04a Ad 3122785158810Document96 pagesL04a Ad 3122785158810Вячеслав ЖигалкинNo ratings yet
- Manual Tecnico Parte 06 de 10Document49 pagesManual Tecnico Parte 06 de 10samiNo ratings yet
- Manual Mother Board Ecs 61Document42 pagesManual Mother Board Ecs 61ajha6775% (4)
- Pioneer VSX 917v K SCHDocument34 pagesPioneer VSX 917v K SCHiskenderbeyNo ratings yet
- Manual de Service para TV LED PhilipsDocument108 pagesManual de Service para TV LED Philipstavillo1980No ratings yet
- AVH-X5880TV: CRT5881 DVD Rds Av ReceiverDocument2 pagesAVH-X5880TV: CRT5881 DVD Rds Av ReceiverRogerio BuenoNo ratings yet
- Service Manual: Video Camera RecorderDocument19 pagesService Manual: Video Camera RecorderFilmfoto FilmfotoatyahoocomNo ratings yet
- Service Manual Chassis 3P1 5: Design and Specifications Are Subject To Change Without Prior Notice. (Only Referrence)Document35 pagesService Manual Chassis 3P1 5: Design and Specifications Are Subject To Change Without Prior Notice. (Only Referrence)marcellobbNo ratings yet
- Mainboard ESC Model P4M800PRO MDocument29 pagesMainboard ESC Model P4M800PRO MHo Thanh BinhNo ratings yet
- D120-P2-T (K) Digitizer Installation InstructionsDocument7 pagesD120-P2-T (K) Digitizer Installation InstructionsFaras AlsaidNo ratings yet
- Radio Samoch - cqts7421K Toyota Panasonic Matsushita Cq-ts7421k ToyotaDocument37 pagesRadio Samoch - cqts7421K Toyota Panasonic Matsushita Cq-ts7421k ToyotaJan DettlaffNo ratings yet
- Service Manual: FM/MW/LW Compact Disc PlayerDocument12 pagesService Manual: FM/MW/LW Compact Disc PlayerTiago MouraNo ratings yet
- Toshiba INVENTEC DAKAR10ABX CS Dk10ABXG 6050A2509701 A01 Schematic DiagramDocument57 pagesToshiba INVENTEC DAKAR10ABX CS Dk10ABXG 6050A2509701 A01 Schematic DiagramService InfoNo ratings yet
- Service Manual: Issue Date: 30 November 2004Document29 pagesService Manual: Issue Date: 30 November 2004CapitanSalamiNo ratings yet
- Noblex TVLCD Modelo 24lc827hDocument41 pagesNoblex TVLCD Modelo 24lc827hOscar Alberto FernándezNo ratings yet
- Philips Cd150Document39 pagesPhilips Cd150maneaviorelNo ratings yet
- Manual de Servicio CCD Trv300eDocument21 pagesManual de Servicio CCD Trv300edani395arNo ratings yet
- A49bk RolandDocument19 pagesA49bk RolandvargasvNo ratings yet
- Avh-P3380bt AdendoDocument6 pagesAvh-P3380bt Adendomarcio.balistaNo ratings yet
- MinimaConstructionGuide R7Document65 pagesMinimaConstructionGuide R7fox7878100% (1)
- Service Manual LCD Television: Model No. LCD-42XF7Document50 pagesService Manual LCD Television: Model No. LCD-42XF7Daniel AvecillaNo ratings yet
- JD 1354 15 eDocument6 pagesJD 1354 15 eKuang Ah HockNo ratings yet
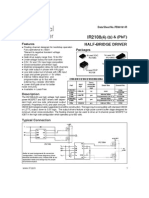
- Features Description: D D D D DDocument19 pagesFeatures Description: D D D D DClóvis MorNo ratings yet
- CD Mechanism Module (S11Ipod/Usb)Document40 pagesCD Mechanism Module (S11Ipod/Usb)Chami NdaNo ratings yet
- Page Title of SchematicDocument40 pagesPage Title of SchematicXuân TrườngNo ratings yet
- Brother P-Touch PT-2420PC Parts List PDFDocument16 pagesBrother P-Touch PT-2420PC Parts List PDFMaxim100No ratings yet
- Service Manual: SupplementDocument9 pagesService Manual: SupplementAlberto MoralesNo ratings yet
- Specification of Control Board: (Data Sheet / Version 1.4)Document14 pagesSpecification of Control Board: (Data Sheet / Version 1.4)sme_2010No ratings yet
- Training Material of RT49A-LA Chassis 20140612042844457Document37 pagesTraining Material of RT49A-LA Chassis 20140612042844457بوند بوندNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Radio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- QSC RMX Series 805 1450 2450Document42 pagesQSC RMX Series 805 1450 2450naughtybigboy100% (5)
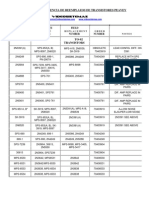
- Guia de Refer en CIA para El Reemplazo de Transistores Peavey - VideosistemasDocument24 pagesGuia de Refer en CIA para El Reemplazo de Transistores Peavey - VideosistemasGloria Vela0% (1)
- (Main 35018086 (3x1) - ICs N501-MSD1306XP - Driv Led N701-OCP8122A OZ9902A-N (24pin) TV Led Konka KDL39-42PS615ATDocument11 pages(Main 35018086 (3x1) - ICs N501-MSD1306XP - Driv Led N701-OCP8122A OZ9902A-N (24pin) TV Led Konka KDL39-42PS615ATJeank Rivadeneyra67% (3)
- PioneerDocument60 pagesPioneerJeank RivadeneyraNo ratings yet
- Trans Ac Dc-Converter Eco enDocument33 pagesTrans Ac Dc-Converter Eco enJeank Rivadeneyra100% (1)
- lc9.3l La 312278518971 100701 PDFDocument108 pageslc9.3l La 312278518971 100701 PDFJeank RivadeneyraNo ratings yet
- Fuente LG 42LS5700Document75 pagesFuente LG 42LS5700Christyan LeonNo ratings yet
- Prosser The Art of Digital Design 2ed 1987 PDFDocument546 pagesProsser The Art of Digital Design 2ed 1987 PDFJeank Rivadeneyra100% (3)
- MFL67289402 PDFDocument35 pagesMFL67289402 PDFJeank RivadeneyraNo ratings yet
- CN220F NSDocument36 pagesCN220F NSJeank RivadeneyraNo ratings yet
- IC TDA-11115, TDA-11145 Service Manual enDocument24 pagesIC TDA-11115, TDA-11145 Service Manual enJeank Rivadeneyra50% (2)
- LCD Modification 1Document159 pagesLCD Modification 1Jeank Rivadeneyra89% (19)
- Kv-29fa750 Fa350 Bx-1lmanual de ServicioDocument134 pagesKv-29fa750 Fa350 Bx-1lmanual de ServicioeliecerNo ratings yet
- LCD Modification 1Document159 pagesLCD Modification 1Jeank Rivadeneyra89% (19)
- Bdp5500 SmaDocument33 pagesBdp5500 SmaJeank Rivadeneyra100% (1)
- LG 55uf950t LB52VDocument111 pagesLG 55uf950t LB52VJeank RivadeneyraNo ratings yet
- SmpsrepairebookDocument105 pagesSmpsrepairebookJeank Rivadeneyra100% (2)
- Philips Chassis Lc8.1u-La SMDocument95 pagesPhilips Chassis Lc8.1u-La SMbili_diskNo ratings yet
- Ic La 76931the Method To Enter The Factory Mode For Cpu 76931 From SzyDocument1 pageIc La 76931the Method To Enter The Factory Mode For Cpu 76931 From SzyJeank RivadeneyraNo ratings yet
- Philips 32PFL3605D LCD Esquema Fonte Tv32pfl3605dDocument2 pagesPhilips 32PFL3605D LCD Esquema Fonte Tv32pfl3605dJeank RivadeneyraNo ratings yet
- Panasonic LCD TV Technical Guide 2011Document80 pagesPanasonic LCD TV Technical Guide 2011Jeank RivadeneyraNo ratings yet
- Data Sheet MKP1584Document17 pagesData Sheet MKP1584aafeletronicaNo ratings yet
- Features: E1 Single Chip TransceiverDocument102 pagesFeatures: E1 Single Chip TransceiverBinh TruongNo ratings yet
- Datasheet LD7523 PDFDocument18 pagesDatasheet LD7523 PDFIvica ConićNo ratings yet
- ReviewerDocument35 pagesReviewerMacLife AlexNo ratings yet
- M Tech VLSI Design SyllabusDocument46 pagesM Tech VLSI Design SyllabusVirupakshi MadhurimaNo ratings yet
- Circuits and Electronics Chapter 3 and NotesDocument49 pagesCircuits and Electronics Chapter 3 and NotesDr. S. DasNo ratings yet
- AN BLDC Sensorless Control ENG MCUMON-0 PDFDocument37 pagesAN BLDC Sensorless Control ENG MCUMON-0 PDFDoDuyBacNo ratings yet
- Fundamentals of Frequency References: ISSCC 2023 TutorialDocument101 pagesFundamentals of Frequency References: ISSCC 2023 Tutorial1203019475No ratings yet
- Power FactorDocument25 pagesPower FactorSri Sai ComputersNo ratings yet
- IRS2092 InternationalRectifier PDFDocument17 pagesIRS2092 InternationalRectifier PDFSD BappiNo ratings yet
- (Sanfoundry) Power Electronics 1. Questions & Answers On DiodesDocument7 pages(Sanfoundry) Power Electronics 1. Questions & Answers On Diodeszelin99No ratings yet
- General Description Features: High Performance Current Mode PWM ControllerDocument11 pagesGeneral Description Features: High Performance Current Mode PWM ControllerPhạm Tấn HảiNo ratings yet
- MCP 73837Document30 pagesMCP 73837Diego Ignacio Pavez OlaveNo ratings yet
- DataSheet UDN2916BDocument8 pagesDataSheet UDN2916BCarlos OrsettiNo ratings yet
- Industrial Training ReportDocument35 pagesIndustrial Training ReportRIKKIYADAV50% (2)
- Wind Warning SystemDocument8 pagesWind Warning Systemchristianson_87No ratings yet
- 2he PDFDocument188 pages2he PDFnbr67sceNo ratings yet
- CustomSim VCS WPDocument11 pagesCustomSim VCS WPManda SwamyNo ratings yet
- Zse Ise60Document9 pagesZse Ise60Ramon Cobos GuerreroNo ratings yet
- Kickback NoiseDocument5 pagesKickback Noisekijiji userNo ratings yet
- Service: ManualDocument102 pagesService: ManualTony KututoNo ratings yet
- Ir 2108Document23 pagesIr 2108robertofurlancriNo ratings yet
- Three Phase Changer ProjectDocument42 pagesThree Phase Changer ProjectDaniel Taiti Kimathi100% (1)
- AD8541Document20 pagesAD8541gliga vasileNo ratings yet
- 39747FDocument258 pages39747FNgoc Quy TranNo ratings yet
- Adt 7420Document24 pagesAdt 7420Vlad TusanNo ratings yet
- Very Low Drop 5V Regulator With Reset: DescriptionDocument79 pagesVery Low Drop 5V Regulator With Reset: DescriptionmaricelluscanNo ratings yet
- Btech EEE Major Project Report On Automatic Solar Tracking SystemDocument31 pagesBtech EEE Major Project Report On Automatic Solar Tracking System12deep2001No ratings yet
- Tps 51123Document37 pagesTps 51123Krista TranNo ratings yet