You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Questions:: Tugas Ii Analisa SistemDocument4 pagesQuestions:: Tugas Ii Analisa SistemKemasAlsyaAfrilianNo ratings yet
- 11 Inverter 1Document68 pages11 Inverter 1KemasAlsyaAfrilianNo ratings yet
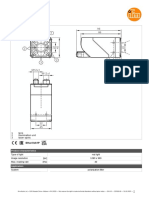
- O2i500 00 - en UsDocument5 pagesO2i500 00 - en UsKemasAlsyaAfrilianNo ratings yet
- ERU 2 WSNDocument24 pagesERU 2 WSNBollapu Suresh ReddyNo ratings yet
- Recruiting: MW Coal Fired Power PlantsDocument6 pagesRecruiting: MW Coal Fired Power PlantstriwibowoNo ratings yet
- Wireless Sensor NetworksDocument27 pagesWireless Sensor NetworksPävíthrå ÄbîNo ratings yet
- The Mouse Deer and CrocodileDocument4 pagesThe Mouse Deer and CrocodileKemasAlsyaAfrilianNo ratings yet
- Karakteristik Dan Pengaturan Kecepatan Motor DC ShuntDocument4 pagesKarakteristik Dan Pengaturan Kecepatan Motor DC ShuntRIDHO AhsanuNo ratings yet
- Ies Wireless Energy PDFDocument29 pagesIes Wireless Energy PDFKemasAlsyaAfrilianNo ratings yet
- Chapter 1, Number System and Codes. Diploma in Electrical and Electronics. Digital System.Document28 pagesChapter 1, Number System and Codes. Diploma in Electrical and Electronics. Digital System.Khairunnisa NasirahNo ratings yet
- Adjective ClausesDocument11 pagesAdjective ClausesRasyidhakimNo ratings yet
- 1 ADocument4 pages1 AKemasAlsyaAfrilianNo ratings yet
- Valve KV Sizing CalculatorDocument7 pagesValve KV Sizing CalculatorKemasAlsyaAfrilianNo ratings yet
- Truth Table, ANF and Trace Definitions and Input ExamplesDocument2 pagesTruth Table, ANF and Trace Definitions and Input ExamplesKemasAlsyaAfrilianNo ratings yet
- Coba MotoerDocument1 pageCoba MotoerKemasAlsyaAfrilianNo ratings yet
- Matlab DetaDocument1 pageMatlab DetaKemasAlsyaAfrilianNo ratings yet
- Pressure (Absolute or Gauge) : Pss - 2a-1z11a - A PDFDocument8 pagesPressure (Absolute or Gauge) : Pss - 2a-1z11a - A PDFjnmanivannanmechNo ratings yet
- P160075 PTM GP SCV 1001Document3 pagesP160075 PTM GP SCV 1001KemasAlsyaAfrilianNo ratings yet
- Matlab DanielDocument1 pageMatlab DanielKemasAlsyaAfrilianNo ratings yet
- Datasheet Type KDocument2 pagesDatasheet Type KMellynia FebriantiNo ratings yet
- A Thousand Years: Christina PerriDocument2 pagesA Thousand Years: Christina PerriKemasAlsyaAfrilianNo ratings yet
- Z80 User ManualDocument308 pagesZ80 User ManualLaFlibusteNo ratings yet
- AD594Document8 pagesAD594Oscar TorresNo ratings yet
- Lampiran Job 5Document1 pageLampiran Job 5KemasAlsyaAfrilianNo ratings yet
- AaDocument1 pageAaKemasAlsyaAfrilianNo ratings yet
- ReadmerDocument79 pagesReadmersatyajtiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dead Stock RegisterDocument92 pagesDead Stock RegisterRahil PatilNo ratings yet
- Unit I Software Process and Agile Developmen 9Document96 pagesUnit I Software Process and Agile Developmen 9Hasan Afwaaz100% (2)
- f20 Architecture White Paper 102942Document20 pagesf20 Architecture White Paper 102942SandroKanningNo ratings yet
- The Data Culture Playbook: A Guide To Building Business Resilience With DataDocument10 pagesThe Data Culture Playbook: A Guide To Building Business Resilience With DatamuhammadrizNo ratings yet
- Sap VS Oracle PDFDocument11 pagesSap VS Oracle PDFdexter.dy4238No ratings yet
- Vacon NXP Marine APFIFF09 Application Manual UD010Document214 pagesVacon NXP Marine APFIFF09 Application Manual UD010TanuTiganu0% (1)
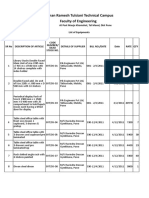
- No Nama Alat Spesifikasi JMLDocument11 pagesNo Nama Alat Spesifikasi JMLImmanuel GetshoNo ratings yet
- EdgeX Foundry A Microservice Approach To IoT Edge Computing Jim WhiteDocument33 pagesEdgeX Foundry A Microservice Approach To IoT Edge Computing Jim WhiteJagadeesh JNo ratings yet
- MAJU FYP Project Proposal TemplateDocument7 pagesMAJU FYP Project Proposal Templatelisapisa123321No ratings yet
- Maxima ManualDocument279 pagesMaxima ManualFrancesco RuggieroNo ratings yet
- High WatermarkDocument3 pagesHigh Watermarknaga54No ratings yet
- Corba HuaweiDocument40 pagesCorba Huaweijcdlopes390No ratings yet
- Guide To Intraday Trading by Jitendra GalaDocument3 pagesGuide To Intraday Trading by Jitendra GalaShashank Choudhary0% (3)
- Build Your Own Resume Parser Using Python and NLP - APILayerDocument12 pagesBuild Your Own Resume Parser Using Python and NLP - APILayerrajikareNo ratings yet
- Review Quiz Edtech2 MidtermDocument3 pagesReview Quiz Edtech2 MidtermLicense Sure ReviewersNo ratings yet
- Guidance For Fuel Management From Buy To Burn - Guidance NoteDocument115 pagesGuidance For Fuel Management From Buy To Burn - Guidance NoteJLChiaNo ratings yet
- Ass9 PDFDocument2 pagesAss9 PDFAlthaf AnsariNo ratings yet
- ATN Project Onsite Operation Guide V1.0Document12 pagesATN Project Onsite Operation Guide V1.0Derick RobinNo ratings yet
- RHEL 7 - Global File System 2 en-USDocument68 pagesRHEL 7 - Global File System 2 en-USSerge PallaNo ratings yet
- Adis 12th ProjectDocument44 pagesAdis 12th ProjectYash SaraogiNo ratings yet
- Lecture 02-Modified Galerkin MethodDocument53 pagesLecture 02-Modified Galerkin MethodfefahimNo ratings yet
- Sibanda GNSS 2014Document70 pagesSibanda GNSS 2014tio aulia basudewaNo ratings yet
- Water Distribution EPANEtDocument13 pagesWater Distribution EPANEtAli Hassan LatkiNo ratings yet
- DLO ReportDocument9 pagesDLO ReportZairil Ashriq Bin Mohd ZailaniNo ratings yet
- Ex 3300Document263 pagesEx 3300simplyredwhiteandblueNo ratings yet
- Database Management SystemsDocument11 pagesDatabase Management SystemsCarlos WilliamsonNo ratings yet
- OOP Micro Project Library Management SystemDocument24 pagesOOP Micro Project Library Management SystemJay PenshanwarNo ratings yet
- Lucifer User ManualDocument69 pagesLucifer User ManualJeff BirkenshawNo ratings yet
- P200(2页)Document2 pagesP200(2页)guwniarzykNo ratings yet
- Annamalai University: Distance EducationDocument19 pagesAnnamalai University: Distance EducationMukesh BishtNo ratings yet