You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Manuals Com Cost Accounting by Matz and Usry 9th Edition Manual Ht4Document2 pagesThe Manuals Com Cost Accounting by Matz and Usry 9th Edition Manual Ht4ammarhashmi198633% (12)
- X-Universe - Rogues Testament by Steve MillerDocument281 pagesX-Universe - Rogues Testament by Steve MillerRoccoGranataNo ratings yet
- Environmental SustainabilityDocument3 pagesEnvironmental SustainabilityJoseph Michael Perez100% (1)
- Course Recorder (Paperless) MDR290Document4 pagesCourse Recorder (Paperless) MDR290Jay SanchaniyaNo ratings yet
- Presentation DIP5000 enDocument31 pagesPresentation DIP5000 enNeelakandan MasilamaniNo ratings yet
- Hauser Cutting Machine DrawingDocument87 pagesHauser Cutting Machine Drawingankush belkarNo ratings yet
- Frenic VG Stack Instruction Manual 400v Inr Si47 1721f e PDFDocument176 pagesFrenic VG Stack Instruction Manual 400v Inr Si47 1721f e PDFankush belkarNo ratings yet
- CRN6870623391Document4 pagesCRN6870623391ankush belkarNo ratings yet
- Allen Bradley Controllogix Ethernet ManualDocument178 pagesAllen Bradley Controllogix Ethernet Manualankush belkarNo ratings yet
- PCC WP G120 Drive Faults To HMI - 2020Document12 pagesPCC WP G120 Drive Faults To HMI - 2020ankush belkarNo ratings yet
- Bedade Pick Place Robotic ArmDocument35 pagesBedade Pick Place Robotic Armankush belkarNo ratings yet
- POWER JACK Report 35 PagesDocument35 pagesPOWER JACK Report 35 Pagesankush belkarNo ratings yet
- Auto Potatochips Meking SystemDocument10 pagesAuto Potatochips Meking Systemankush belkarNo ratings yet
- Parkhe ResumeDocument2 pagesParkhe Resumeankush belkarNo ratings yet
- "Adaptive Headlight System": A Project Stage-I ReportonDocument5 pages"Adaptive Headlight System": A Project Stage-I Reportonankush belkarNo ratings yet
- Design The PaintDocument2 pagesDesign The Paintankush belkarNo ratings yet
- Automatic Car Washer & Dryer SystemDocument2 pagesAutomatic Car Washer & Dryer Systemankush belkarNo ratings yet
- Wall Panting SystemDocument11 pagesWall Panting Systemankush belkarNo ratings yet
- Green Pea Seprator MachineDocument38 pagesGreen Pea Seprator Machineankush belkarNo ratings yet
- Study of Pneumatic Braking System With Pneumatic Bumper ProtectionDocument8 pagesStudy of Pneumatic Braking System With Pneumatic Bumper Protectionankush belkarNo ratings yet
- Iot ProgrammingDocument7 pagesIot Programmingankush belkarNo ratings yet
- Fabrication of Portable Noodle Making Ma Fd82a2eeDocument4 pagesFabrication of Portable Noodle Making Ma Fd82a2eeankush belkarNo ratings yet
- Voice Controlled Wireless AC Motor Speed Control SystemDocument2 pagesVoice Controlled Wireless AC Motor Speed Control Systemankush belkarNo ratings yet
- Development of An Adaptive Steering Controlled Headlight For Low Cost VehiclesDocument5 pagesDevelopment of An Adaptive Steering Controlled Headlight For Low Cost Vehiclesankush belkarNo ratings yet
- Semi-Similarity Design of Motorcycle-Hydraulic-Disk Brake: Strategy and ApplicationDocument4 pagesSemi-Similarity Design of Motorcycle-Hydraulic-Disk Brake: Strategy and Applicationankush belkarNo ratings yet
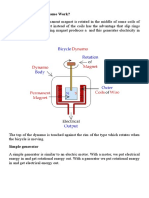
- How Does A Bicycle Dynamo Work?Document2 pagesHow Does A Bicycle Dynamo Work?ankush belkarNo ratings yet
- Automatic Job Rejection & Counting SystemDocument4 pagesAutomatic Job Rejection & Counting Systemankush belkarNo ratings yet
- Adicionando Mais Um Disco (VG) HPUXDocument4 pagesAdicionando Mais Um Disco (VG) HPUXVinicius SantosNo ratings yet
- Wyche Bridge 2000Document12 pagesWyche Bridge 2000BhushanRajNo ratings yet
- Recruitment of Junior Associates (Customer Support & Sales) PDFDocument2 pagesRecruitment of Junior Associates (Customer Support & Sales) PDFSingh ShivamNo ratings yet
- Is Iec 60534 2 1 1998Document48 pagesIs Iec 60534 2 1 1998Sreeram PanigrahiNo ratings yet
- Roland Mdx-650 Milling TutorialDocument28 pagesRoland Mdx-650 Milling TutorialRavelly TelloNo ratings yet
- Premium Protection Synthetic Motor Oils (AMO & ARO)Document2 pagesPremium Protection Synthetic Motor Oils (AMO & ARO)brian5786No ratings yet
- PQ100 Data SheetDocument2 pagesPQ100 Data Sheethanif_perdanaNo ratings yet
- I.Objectives: Grades 1 To 12 Daily Lesson Log School Grade Level Teacher Learning Area Teaching Dates and Time QuarterDocument4 pagesI.Objectives: Grades 1 To 12 Daily Lesson Log School Grade Level Teacher Learning Area Teaching Dates and Time QuarterMarryShailaine CletNo ratings yet
- Manual de TallerDocument252 pagesManual de TallerEdison RodriguezNo ratings yet
- Methodology: Procedure For Checking of VerticalityDocument6 pagesMethodology: Procedure For Checking of VerticalityDinesh Kumar PatelNo ratings yet
- R Values For Z PurlinsDocument71 pagesR Values For Z PurlinsJohn TreffNo ratings yet
- David T History Rev 26032019Document18 pagesDavid T History Rev 26032019David TaleroNo ratings yet
- Operating System ComponentsDocument59 pagesOperating System ComponentsJikku VarUgheseNo ratings yet
- ElinkDocument36 pagesElinkjosemanuelarangoNo ratings yet
- Facility Layout Case StudyDocument8 pagesFacility Layout Case StudyHitesh SinglaNo ratings yet
- SC-HM910 - HM810 (sm-RQZM0167) PDFDocument104 pagesSC-HM910 - HM810 (sm-RQZM0167) PDFJory2005No ratings yet
- TemplateDocument17 pagesTemplatedaveNo ratings yet
- Oct 15 Action Research PLT AgendaDocument2 pagesOct 15 Action Research PLT Agendaapi-231962429No ratings yet
- Acord and IAADocument4 pagesAcord and IAABHASKARA_20080% (1)
- Ship-Like Target Design For Underwater Explosion Experiments PDFDocument92 pagesShip-Like Target Design For Underwater Explosion Experiments PDFFernando Raúl LADINONo ratings yet
- Graphics in C LanguageDocument8 pagesGraphics in C LanguagePattabhi RamaraoNo ratings yet
- Dissolved Gas Analysis of Transformer Oil: Mrs. Harsha Shah Insulation DivisionDocument38 pagesDissolved Gas Analysis of Transformer Oil: Mrs. Harsha Shah Insulation Divisionsjavre9390100% (1)
- Marrantz Service Manual Using CS493263 09122113454050Document63 pagesMarrantz Service Manual Using CS493263 09122113454050Lars AnderssonNo ratings yet
- 50rhe PDDocument40 pages50rhe PDm_moreira1974No ratings yet
- Seminarski RadDocument32 pagesSeminarski RadAdmir KlinčevićNo ratings yet