You might also like
- Microcontroladores Historia - Arquitectura AplicacionesDocument89 pagesMicrocontroladores Historia - Arquitectura AplicacionesMaximiliano GiniNo ratings yet
- MICROCONTROLADORESDocument117 pagesMICROCONTROLADORESMaferBeristain100% (3)
- Sesión 3 Introduccion A MicrocontroladoresDocument84 pagesSesión 3 Introduccion A MicrocontroladoresGeiner David GranielNo ratings yet
- Microcontroladores 1 1Document89 pagesMicrocontroladores 1 1Erika SamuñiNo ratings yet
- Manual Monica BarreraDocument17 pagesManual Monica BarrerajaNo ratings yet
- Arquitectura de MicrocontroladoresDocument7 pagesArquitectura de MicrocontroladoresJaphet González BerronesNo ratings yet
- Resumen MicrocontroladoresDocument10 pagesResumen MicrocontroladoresIvan NuñezNo ratings yet
- Arquitectura de Los Microcontroladores PicDocument21 pagesArquitectura de Los Microcontroladores PicDavid Jair Hernandez RamosNo ratings yet
- Unidad 4 MicrocontroladoresDocument17 pagesUnidad 4 MicrocontroladoresAdrikk SparrowNo ratings yet
- Pic MicroDocument51 pagesPic MicrosibiklandiaNo ratings yet
- S2 - Arquitectura de Micro ControladoresDocument64 pagesS2 - Arquitectura de Micro Controladoresdavid aurelio sencia torresNo ratings yet
- Microcontroladores. Prof Danilo Rojas Chanto, Apoyo Examen FinalDocument45 pagesMicrocontroladores. Prof Danilo Rojas Chanto, Apoyo Examen FinalAssasingNo ratings yet
- Lab 1 Sist - Micro - 2022Document4 pagesLab 1 Sist - Micro - 2022gonzalo pucho quispeNo ratings yet
- Los MicrocontroladoresDocument27 pagesLos MicrocontroladoresFabiana RodriguezNo ratings yet
- Microcontrolador vs. MicroprocesadorDocument8 pagesMicrocontrolador vs. MicroprocesadorNahuel PiancaNo ratings yet
- MANUAL Microcontroladores UTNCDocument20 pagesMANUAL Microcontroladores UTNCJuannita FrysNo ratings yet
- Exposicion MicrocontroladoresDocument45 pagesExposicion MicrocontroladoresAlberto DominguezNo ratings yet
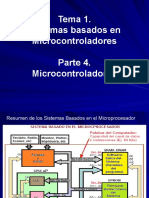
- Presentacion Tema 1. Parte 4. Sistemas Basados en El MicrocontroladorDocument15 pagesPresentacion Tema 1. Parte 4. Sistemas Basados en El MicrocontroladorKevin RodriguezNo ratings yet
- Unidad Temática I MicroprocesadorDocument124 pagesUnidad Temática I Microprocesadorkevin montañoNo ratings yet
- Recursos Comunes A Todos Los MicrocontroladoresDocument7 pagesRecursos Comunes A Todos Los MicrocontroladoresAbraham CortezNo ratings yet
- Microcontrolador LOYOLADocument29 pagesMicrocontrolador LOYOLARaúl ValenciaNo ratings yet
- MicrocontroladoresDocument13 pagesMicrocontroladoresJose AnguloNo ratings yet
- Unidad I. Arquitectura Interna y Externa Del MicrocontroladorDocument54 pagesUnidad I. Arquitectura Interna y Externa Del MicrocontroladorFortino60% (5)
- Introducción A Los Microprocesadores y MicrocontroladoresDocument20 pagesIntroducción A Los Microprocesadores y MicrocontroladoresMartin HGNo ratings yet
- Microcontroladores 2020Document6 pagesMicrocontroladores 2020andre yeraldin mezaNo ratings yet
- Microcontrolador WikiDocument14 pagesMicrocontrolador WikiMakinon Imparable ImparableNo ratings yet
- Microcontrolador WikiDocument5 pagesMicrocontrolador WikiAnonymous mShdTiNo ratings yet
- Microcontroladores y Microprocesadores DiferenciaDocument5 pagesMicrocontroladores y Microprocesadores DiferenciaThomii RodriguezNo ratings yet
- Caracteristicas de Los PICDocument8 pagesCaracteristicas de Los PICt_toyoNo ratings yet
- Mapa Conceptual 2Document17 pagesMapa Conceptual 2juan_ruizmp4119580No ratings yet
- Introduccion A Los Microcontroladores PDFDocument17 pagesIntroduccion A Los Microcontroladores PDFMaximiliano GiniNo ratings yet
- Práctica 1Document13 pagesPráctica 1Mario Esteban Rebollo RebolloNo ratings yet
- Laboratorio 10Document10 pagesLaboratorio 10Rosina Garcia PilcomayoNo ratings yet
- Marco Teórico MicrocontroladoresDocument13 pagesMarco Teórico MicrocontroladoresSuker Rodríguez50% (4)
- Cerradura Electronica Codificad1Document8 pagesCerradura Electronica Codificad1Jhon JairoNo ratings yet
- Microcontroladores 1Document48 pagesMicrocontroladores 1Erick AlvarezNo ratings yet
- Generalidades Del MicrocontroladorDocument8 pagesGeneralidades Del MicrocontroladorYurian Angelica Sanoja LunaNo ratings yet
- Inv Aqdc Josemanuelrf U5Document7 pagesInv Aqdc Josemanuelrf U5Pedro Daniel Rosas FajardoNo ratings yet
- Mercado de Los MicrocontroladoresDocument22 pagesMercado de Los MicrocontroladoresJuan Camilo Naranjo0% (1)
- Arquitectura de Un MicrocontroladorDocument32 pagesArquitectura de Un MicrocontroladorBryan CastroNo ratings yet
- Clase - Tema 1 - Tipos de Microprocesadores y MicrocontroladoresDocument30 pagesClase - Tema 1 - Tipos de Microprocesadores y MicrocontroladoresEmiliano GarciaNo ratings yet
- C 3 MicrocontroladoresDocument36 pagesC 3 Microcontroladorestati4No ratings yet
- MICROCONTROLADORESDocument39 pagesMICROCONTROLADORESCarlos Lopez100% (1)
- Informe de Microcontroladores Semana05Document9 pagesInforme de Microcontroladores Semana05Jhonatan N. Cedillo FloresNo ratings yet
- MicrocontroladoresDocument29 pagesMicrocontroladoresepablo007No ratings yet
- Apuntes Introduccion A Los MicrocontroladoresDocument62 pagesApuntes Introduccion A Los MicrocontroladoresJose Carlos OsNo ratings yet
- DHI1Document30 pagesDHI1Isra Figueirido ArnosoNo ratings yet
- Sistemas Embebidos Basados en MicrocontroladoresDocument7 pagesSistemas Embebidos Basados en MicrocontroladoresAntony Salcedo OrtizNo ratings yet
- Notas AVR Parte1 PDFDocument78 pagesNotas AVR Parte1 PDFJose Antonio Meza ChoquehuaytaNo ratings yet
- El PIC Es Un Controlador de Interfaz Periférico Por Sus Siglas en InglésDocument33 pagesEl PIC Es Un Controlador de Interfaz Periférico Por Sus Siglas en InglésMaelo Borinqueño100% (2)
- Manual de Microprocesador TeiDocument95 pagesManual de Microprocesador TeiJose NovoaNo ratings yet
- Unidad 1 MicrocontroladoresDocument24 pagesUnidad 1 MicrocontroladoresIgnacio Mortera MarquezNo ratings yet
- Guia 1 Tema 2 Microcontroladores AVR de ATMELDocument34 pagesGuia 1 Tema 2 Microcontroladores AVR de ATMELmilie pradoNo ratings yet
- MicrocontroladoresDocument16 pagesMicrocontroladoresSebastián HernándezNo ratings yet
- Organización Interna de Los MicrocontroladoresDocument20 pagesOrganización Interna de Los MicrocontroladoresJenny StevezNo ratings yet
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeFrom EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo ratings yet
- Computación Física: Explorando la visión por computadora en la computación físicaFrom EverandComputación Física: Explorando la visión por computadora en la computación físicaNo ratings yet
- UF0852 - Instalación y actualización de sistemas operativosFrom EverandUF0852 - Instalación y actualización de sistemas operativosRating: 5 out of 5 stars5/5 (1)
- 8 CNC G66 G68 G25 G81Document34 pages8 CNC G66 G68 G25 G81Jerry JamesNo ratings yet
- Historia de La NutricionDocument24 pagesHistoria de La NutricionCely RodríguezNo ratings yet
- Teoria de TemporizadoresDocument25 pagesTeoria de TemporizadoresJerry JamesNo ratings yet
- Unidad 02Document18 pagesUnidad 02Jerry JamesNo ratings yet
- Socialización PTI EstudiantesDocument22 pagesSocialización PTI EstudiantesYeKa FelipeNo ratings yet
- Electricista AutomotrizDocument1 pageElectricista AutomotrizLuis ColanNo ratings yet
- El IncestoDocument4 pagesEl IncestoFabrizioAlmeidaNo ratings yet
- FormatoDocument2 pagesFormatoLeidy Johana JimenezNo ratings yet
- Acto de Advertencia Sobre Molestia Al InquilinoDocument3 pagesActo de Advertencia Sobre Molestia Al InquilinoCelia Vásquez BidóNo ratings yet
- TDR - PromotoresDocument2 pagesTDR - PromotoresJuan Ricardo Quispe BordaNo ratings yet
- Normativa para El Manejo de Ropa en El LavaderoDocument3 pagesNormativa para El Manejo de Ropa en El LavaderoBety SconzaNo ratings yet
- Tema 8: Fascismo y NazismoDocument20 pagesTema 8: Fascismo y NazismoJuan Pedro LuisNo ratings yet
- Venopuncion y Manejo de Especimenes HematologicosDocument7 pagesVenopuncion y Manejo de Especimenes HematologicosJacqueline SandovalNo ratings yet
- Almacen Salida Enero 2020Document140 pagesAlmacen Salida Enero 2020Wilver Ccencho CondoriNo ratings yet
- Claudia Mugica Zuñiga - A1u1 - DaDocument9 pagesClaudia Mugica Zuñiga - A1u1 - DaClaudia I. Mugica ZuñigaNo ratings yet
- ¿Qué Es Un Relato?-ExposiciónDocument14 pages¿Qué Es Un Relato?-ExposiciónFer A. PérezNo ratings yet
- Grupo 6Document3 pagesGrupo 6Estip HanccoNo ratings yet
- Anestecia y Analgesia en CobayosDocument20 pagesAnestecia y Analgesia en CobayosAndres LagoNo ratings yet
- ParkinsonDocument24 pagesParkinsonSilvia AlejandraNo ratings yet
- Proyecto SocialDocument11 pagesProyecto SocialEdson Depaz ReyesNo ratings yet
- AlgebraDocument16 pagesAlgebrarafcarNo ratings yet
- Planilla IEEE ProyectoDocument4 pagesPlanilla IEEE ProyectoERIK SANTIAGO MANTILLA AGATONNo ratings yet
- Díaz Barriga ÁngelDocument12 pagesDíaz Barriga ÁngelTexontla TexontitlanNo ratings yet
- Calificacion de Faltas - 1Document11 pagesCalificacion de Faltas - 1Juan Carlos Cuesta MaggioloNo ratings yet
- DFPR U3 A1 CempDocument4 pagesDFPR U3 A1 CempCesar MorgadoNo ratings yet
- Acceso A ScrumStudyDocument5 pagesAcceso A ScrumStudyJuan Carlos Ruiz HonoresNo ratings yet
- Ada AlegreDocument12 pagesAda AlegreeluniversitarioutpNo ratings yet
- 2da Clase Del 2do ParcialDocument15 pages2da Clase Del 2do Parcialmoises inoaNo ratings yet
- Programa Servicio Social Comunitario 2022Document32 pagesPrograma Servicio Social Comunitario 2022Liliana Alvarez VilchisNo ratings yet
- Muerte y Politica - MazzeoDocument17 pagesMuerte y Politica - MazzeoGi ToledoNo ratings yet
- TESTIMONAL Y Pliego de Posiciones para La Prueba Testimonial Del Juicio de Reconocimiento de PaternidadDocument3 pagesTESTIMONAL Y Pliego de Posiciones para La Prueba Testimonial Del Juicio de Reconocimiento de PaternidadomarvvelardeNo ratings yet
- Adelanto El Lobby FerozDocument8 pagesAdelanto El Lobby FerozBárbara Sepúlveda HalesNo ratings yet
- 2.1objetivo Del Área de Producción en AnimaciónDocument2 pages2.1objetivo Del Área de Producción en AnimaciónDanaeSanchez100% (1)
- Total 16M PDFDocument126 pagesTotal 16M PDFLuisAlbertoVerdejoTapia100% (1)