You might also like
- Actuation of Electro-Pneumatic System Using MATLAB SimulinkDocument7 pagesActuation of Electro-Pneumatic System Using MATLAB SimulinkJimmy Deswidawansyah NasutionNo ratings yet
- FEM Launcher 100%L - RevDocument16 pagesFEM Launcher 100%L - RevJimmy Deswidawansyah NasutionNo ratings yet
- Speifikasi Tipikal Impulse Modal HammerDocument17 pagesSpeifikasi Tipikal Impulse Modal HammerJimmy Deswidawansyah NasutionNo ratings yet
- Development of Direct Kinematics & Workspace Representation For Smokie Robot Manipulator & The Barrett WAMDocument7 pagesDevelopment of Direct Kinematics & Workspace Representation For Smokie Robot Manipulator & The Barrett WAMJimmy Deswidawansyah NasutionNo ratings yet
- Setting FEM Di SW 2018Document2 pagesSetting FEM Di SW 2018Jimmy Deswidawansyah NasutionNo ratings yet
- Radial ForceDocument2 pagesRadial ForceJimmy Deswidawansyah NasutionNo ratings yet
- Calculating Radial ThrustDocument3 pagesCalculating Radial ThrustJimmy Deswidawansyah NasutionNo ratings yet
- Citra Google Maps - Runway SMBIIDocument14 pagesCitra Google Maps - Runway SMBIIJimmy Deswidawansyah NasutionNo ratings yet
- Crack Detection and Identification Using Vibration Signals & Fuzzy ClusteringDocument9 pagesCrack Detection and Identification Using Vibration Signals & Fuzzy ClusteringJimmy Deswidawansyah NasutionNo ratings yet
- Book Pract RDFFBD Chapter-6Document90 pagesBook Pract RDFFBD Chapter-6HuongDuongNo ratings yet
- Vertical Mixed Flow PumpsDocument16 pagesVertical Mixed Flow PumpsJimmy Deswidawansyah NasutionNo ratings yet
- Assy GUY Moor 3DDocument2 pagesAssy GUY Moor 3DJimmy Deswidawansyah NasutionNo ratings yet
- Centrifugal Bearing TipsDocument5 pagesCentrifugal Bearing TipsJimmy Deswidawansyah NasutionNo ratings yet
- 165Document13 pages165gfreak0No ratings yet
- Axial ThrustDocument6 pagesAxial ThrustJimmy Deswidawansyah NasutionNo ratings yet
- Rolling Bearing Competence For Fluid Pumps Tpi 223 de enDocument64 pagesRolling Bearing Competence For Fluid Pumps Tpi 223 de enJimmy Deswidawansyah NasutionNo ratings yet
- 11094781Document18 pages11094781Jimmy Deswidawansyah NasutionNo ratings yet
- TechCut 5Document8 pagesTechCut 5Jimmy Deswidawansyah NasutionNo ratings yet
- C00100Document24 pagesC00100Jimmy Deswidawansyah NasutionNo ratings yet
- Mechanics of BoneDocument30 pagesMechanics of BoneJimmy Deswidawansyah NasutionNo ratings yet
- Tower-Fatigue 2 From (Fatigue 1) - 4Document6 pagesTower-Fatigue 2 From (Fatigue 1) - 4Jimmy Deswidawansyah NasutionNo ratings yet
- K-Chart Exp Research Design PDFDocument1 pageK-Chart Exp Research Design PDFJimmy Deswidawansyah NasutionNo ratings yet
- Stress-Strain Relationships Look Similar To Force-Deformation Relationships BecauseDocument41 pagesStress-Strain Relationships Look Similar To Force-Deformation Relationships BecauseJimmy Deswidawansyah NasutionNo ratings yet
- HBM - Karl Hoffmann - EN - An Introduction To Stress Analysis and Transducer Design Using Strain Gauges PDFDocument261 pagesHBM - Karl Hoffmann - EN - An Introduction To Stress Analysis and Transducer Design Using Strain Gauges PDFJimmy Deswidawansyah NasutionNo ratings yet
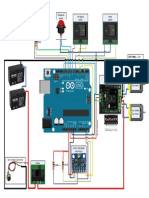
- Arduino Segwey SchemDocument1 pageArduino Segwey SchemJimmy Deswidawansyah NasutionNo ratings yet
- DAFTAR PUSTAKA Sumatera Peat Forests Climate ChangeDocument1 pageDAFTAR PUSTAKA Sumatera Peat Forests Climate ChangeJimmy Deswidawansyah NasutionNo ratings yet
- Setting Maintenance and Reliability Standards For High ReliabilityDocument11 pagesSetting Maintenance and Reliability Standards For High ReliabilityabmannyNo ratings yet
- 2-Analysis of Vibration and Failure Problems in Reciprocating Triplex Pumps - Jcw&FrsDocument8 pages2-Analysis of Vibration and Failure Problems in Reciprocating Triplex Pumps - Jcw&FrsjsmnjasminesNo ratings yet
- KK 2.1 Multi-Rotor Control Board: User GuideDocument14 pagesKK 2.1 Multi-Rotor Control Board: User GuideSandal MasjidNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Al Marai ERP EnglishDocument2 pagesAl Marai ERP EnglisharshleoNo ratings yet
- Python GUI Programming Cookbook - Sample ChapterDocument27 pagesPython GUI Programming Cookbook - Sample ChapterPackt Publishing86% (7)
- Credit Card Fraud Detection System Using CNNDocument7 pagesCredit Card Fraud Detection System Using CNNIJRASETPublicationsNo ratings yet
- Paying Guest ManagementDocument60 pagesPaying Guest ManagementVISHNU KNo ratings yet
- Class XII Computer Science Sample Paper 1 SolvedDocument10 pagesClass XII Computer Science Sample Paper 1 SolvedVijayaBabuNo ratings yet
- Programming structures if, for and while loopsDocument16 pagesProgramming structures if, for and while loopsFrancisco AristizabalNo ratings yet
- ASProtect VM AnalyzeDocument33 pagesASProtect VM AnalyzegioruwreNo ratings yet
- NothinghamDocument2 pagesNothinghamvelve660201No ratings yet
- Sc2Sei Automatic Transfer of Phase Readings and Waveforms From A Seiscomp3 Data Base To A Seisan Data BaseDocument30 pagesSc2Sei Automatic Transfer of Phase Readings and Waveforms From A Seiscomp3 Data Base To A Seisan Data BaseHernan Gerley Alvarado RodriguezNo ratings yet
- Color Grid Design in PhotoshopDocument30 pagesColor Grid Design in PhotoshopElit igaNo ratings yet
- Nat ADABAS4 NDDocument54 pagesNat ADABAS4 NDMudit Rana100% (1)
- Chapter 3 LoadersDocument47 pagesChapter 3 LoadersSky J0% (1)
- Cs 1102 Tutorial 7Document33 pagesCs 1102 Tutorial 7Gobara DhanNo ratings yet
- ANTEX Sound CardsDocument9 pagesANTEX Sound CardsEmilio I WildeNo ratings yet
- EASA AP to DOA ManualDocument42 pagesEASA AP to DOA ManualAlain Francois100% (1)
- D2 - Boat ReservationDocument3 pagesD2 - Boat ReservationJovit FondevillaNo ratings yet
- Core Java: - Sharad BallepuDocument56 pagesCore Java: - Sharad BallepuyacobaschalewNo ratings yet
- WAKAN 教學Document22 pagesWAKAN 教學PeterWangNo ratings yet
- User Manual Aj2885Document49 pagesUser Manual Aj2885nnt236No ratings yet
- Isom ReviewerDocument35 pagesIsom ReviewerKristian UyNo ratings yet
- Devices Emergency Rescue ToolDocument2 pagesDevices Emergency Rescue ToolDiego AlvesNo ratings yet
- 945gcm S MultiqigDocument86 pages945gcm S MultiqigRicardo SilvaNo ratings yet
- Common GST Login Problems and SolutionsDocument3 pagesCommon GST Login Problems and Solutionscalcchamp calculatorNo ratings yet
- Aeroelastic AnalysisDocument864 pagesAeroelastic AnalysisJorge SilvaNo ratings yet
- Kali AssigmentDocument17 pagesKali Assigmentkounglay mmtNo ratings yet
- ABAP Different Pop UpsDocument14 pagesABAP Different Pop UpsGopigah SivaloganathanNo ratings yet
- Understanding Structure: Instructor's Manual Table of ContentsDocument10 pagesUnderstanding Structure: Instructor's Manual Table of ContentsLeonard GojerNo ratings yet
- Stable BaselinesDocument239 pagesStable BaselinesdridiNo ratings yet
- Revit Architecture QuizDocument7 pagesRevit Architecture QuizArchitect MamongNo ratings yet
- Mikrobasic ManualDocument207 pagesMikrobasic Manualfkimya100% (1)