You might also like
- Deformation & StrengthDocument35 pagesDeformation & StrengthcolorofstoneNo ratings yet
- Strengthening Mechanisms PDFDocument11 pagesStrengthening Mechanisms PDFSelva BabuNo ratings yet
- 1.0 TitleDocument10 pages1.0 TitlezackziffiNo ratings yet
- Energy Audit Report by CPRIDocument247 pagesEnergy Audit Report by CPRImag_ktps20021520100% (2)
- Benchmarks PDFDocument1,738 pagesBenchmarks PDFPiseth Heng100% (1)
- CH 11Document35 pagesCH 11nur afifahNo ratings yet
- Unit 4 MSE Heat Treatment of MetalsDocument85 pagesUnit 4 MSE Heat Treatment of MetalsRushikesh KaleNo ratings yet
- Failure of MaterialsDocument34 pagesFailure of MaterialsvinayprasadskNo ratings yet
- Dislocations and Strengthening Mechanisms: Module-6Document29 pagesDislocations and Strengthening Mechanisms: Module-6Baskar ManiNo ratings yet
- Extrusion of Metals: Mr. Jay Vora Faculty, School of Technology, PDPU, GandhinagarDocument27 pagesExtrusion of Metals: Mr. Jay Vora Faculty, School of Technology, PDPU, GandhinagarAdityasinh DesaiNo ratings yet
- Extrusion and Its ApplicationDocument28 pagesExtrusion and Its ApplicationLakhan GuptaNo ratings yet
- Non-Traditional Machining: Electro Chemical Machining (ECM)Document14 pagesNon-Traditional Machining: Electro Chemical Machining (ECM)NimoNo ratings yet
- 2 - Mechanical Properties-StudentDocument119 pages2 - Mechanical Properties-StudentNishant DeyNo ratings yet
- Wear of Nano Composites & Advanced in Nano Clustering SimulationDocument5 pagesWear of Nano Composites & Advanced in Nano Clustering SimulationmossmossNo ratings yet
- Mechanical Properties of Material: Definition and Example (Notes & PDF)Document5 pagesMechanical Properties of Material: Definition and Example (Notes & PDF)Мария ЮжаковаNo ratings yet
- Chapter2 Bonding and PropertiesDocument71 pagesChapter2 Bonding and PropertiesShahd AlhamaydaNo ratings yet
- Introduction To Nano MaterialsDocument5 pagesIntroduction To Nano Materialsharsha sNo ratings yet
- Plastic Deformation of MetalsDocument42 pagesPlastic Deformation of MetalsNaresh DeshpandeNo ratings yet
- Tutorial Answers - Mechanical Behaviour of MaterialsDocument2 pagesTutorial Answers - Mechanical Behaviour of MaterialsbananaNo ratings yet
- Unit 2Document50 pagesUnit 2Ravichandran GNo ratings yet
- Properties of Engineering Materials Lesson 3 (I)Document11 pagesProperties of Engineering Materials Lesson 3 (I)Douglas Kufre-Abasi GilbertNo ratings yet
- Graphene Overview 2018Document17 pagesGraphene Overview 2018xavierNo ratings yet
- New Model For Predicting Thermal Radiation From Flares and High Pressure Jet Fires For Hydrogen and SyngasDocument15 pagesNew Model For Predicting Thermal Radiation From Flares and High Pressure Jet Fires For Hydrogen and Syngasthlim19078656No ratings yet
- Lecture - 5 - Notes 5 - Fracture - Brittle Ductile Transition PDFDocument100 pagesLecture - 5 - Notes 5 - Fracture - Brittle Ductile Transition PDFrony16nov100% (1)
- Toughness - WikipediaDocument3 pagesToughness - WikipediaaliNo ratings yet
- MSE 280: Introduction To Engineering MaterialsDocument44 pagesMSE 280: Introduction To Engineering Materialsjains.boyNo ratings yet
- Negative Thermal Expansion Materials: Literature ReviewDocument7 pagesNegative Thermal Expansion Materials: Literature ReviewsilentShoeNo ratings yet
- New High Strength and Faster Drilling TSP Diamond CuttersDocument97 pagesNew High Strength and Faster Drilling TSP Diamond Cutterssuresh_501No ratings yet
- c1 Mechanical PropertiesDocument46 pagesc1 Mechanical PropertiesHusnal TaufiqNo ratings yet
- @standardsharin - ASME STP-NU-044-2011-12Document62 pages@standardsharin - ASME STP-NU-044-2011-12EricNo ratings yet
- MSE 2203: Mechanical Behavior of Materials: Chapter One Theory of Elasticity and PlasticityDocument25 pagesMSE 2203: Mechanical Behavior of Materials: Chapter One Theory of Elasticity and PlasticityRosni hasanNo ratings yet
- Introduction To Materials: Prof. H. K. KhairaDocument75 pagesIntroduction To Materials: Prof. H. K. KhairaDhanush NairNo ratings yet
- Testing and Evaluation of Engineering MaterialsDocument5 pagesTesting and Evaluation of Engineering MaterialsFAHED AYYAD100% (1)
- ME2101E - Design Against Fatigue - BWDocument26 pagesME2101E - Design Against Fatigue - BWZhang DunJieNo ratings yet
- Mothballing Requires More Than Idle ThoughtDocument4 pagesMothballing Requires More Than Idle Thoughtfawmer61No ratings yet
- Nano PPT IntroductionDocument39 pagesNano PPT IntroductionNiteesh KumarNo ratings yet
- 1-Mechanics of Material - I (Mid Term)Document134 pages1-Mechanics of Material - I (Mid Term)irum,No ratings yet
- Engr: Temoor Abbas Larik: QUCEST Larkana Campus Mechanical Engineering DepartmentDocument42 pagesEngr: Temoor Abbas Larik: QUCEST Larkana Campus Mechanical Engineering DepartmentTemoor AbbasNo ratings yet
- Bonding and Properties 2018 PDFDocument31 pagesBonding and Properties 2018 PDFJackNo ratings yet
- FractureDocument21 pagesFracturemgskumar100% (1)
- Recovery Recrystallization Grain GrowthDocument15 pagesRecovery Recrystallization Grain Growthteju1996coolNo ratings yet
- 1 Mechanical Behavior of MaterialsDocument7 pages1 Mechanical Behavior of MaterialsMohammed Rashik B CNo ratings yet
- Elastic/Plastic Deformation (Chapter 6canggaan)Document11 pagesElastic/Plastic Deformation (Chapter 6canggaan)qc12345No ratings yet
- Toughness TestDocument25 pagesToughness TestNehaJainNo ratings yet
- Recovery, Recrystallization, and Grain GrowthDocument12 pagesRecovery, Recrystallization, and Grain GrowthstevenwhittlNo ratings yet
- Chapter 9e FatigueDocument20 pagesChapter 9e FatigueavenashaNo ratings yet
- Mechanical Behaviour of MaterialsDocument10 pagesMechanical Behaviour of Materialsaditya2092No ratings yet
- 2-BMCG2323 Manufaturing MaterialsDocument91 pages2-BMCG2323 Manufaturing Materialshemarubini96No ratings yet
- 8.2 Final Fracture ToughnessDocument19 pages8.2 Final Fracture ToughnessHenry Theodore DaquinagNo ratings yet
- TEM Lecture CrystallineDocument30 pagesTEM Lecture CrystallineSyed Abdul AhadNo ratings yet
- L02 Introduction To Materials Science and EngineeringDocument14 pagesL02 Introduction To Materials Science and EngineeringVivek vermaNo ratings yet
- Mse Notes - Unit - 2Document12 pagesMse Notes - Unit - 2337-ME- KIRTHAN DEVADIGANo ratings yet
- Chapter2 - AJMDocument13 pagesChapter2 - AJMravish kumarNo ratings yet
- 06-Fatigue and Creep of Materials - F17 PDFDocument23 pages06-Fatigue and Creep of Materials - F17 PDFsabavoonNo ratings yet
- GE 201/203 Introduction To Materials Science and EngineeringDocument21 pagesGE 201/203 Introduction To Materials Science and EngineeringVivek vermaNo ratings yet
- Crystal Imperfections - Point DefectsDocument21 pagesCrystal Imperfections - Point DefectsAbhijeet Singh KatiyarNo ratings yet
- Chapter 03Document41 pagesChapter 03Noor RehmanNo ratings yet
- Objectives: The Nature of MatterDocument31 pagesObjectives: The Nature of MatterGene DacayoNo ratings yet
- 22 - Fracture Toughness & Toughening MechDocument30 pages22 - Fracture Toughness & Toughening MechMd. Rafiqul IslamNo ratings yet
- 2019-High Cycle Fatigue Behavior of Hard Turned 300 M Ultra-High Strength SteelDocument12 pages2019-High Cycle Fatigue Behavior of Hard Turned 300 M Ultra-High Strength SteelYoussef Mbarek100% (1)
- Lec5-Yield Phenomenon, Strain Aging, & Bauchinger EffectDocument14 pagesLec5-Yield Phenomenon, Strain Aging, & Bauchinger Effectsamurai7_77No ratings yet
- Strength of Materials: Selected Topics ONDocument76 pagesStrength of Materials: Selected Topics ONSodik KarimovNo ratings yet
- Chapter One Stress and Strain: 1.1. Mechanical Properties of MaterialsDocument12 pagesChapter One Stress and Strain: 1.1. Mechanical Properties of MaterialsGirma FikreNo ratings yet
- Exercises Strength of MaterialDocument1 pageExercises Strength of MaterialPiseth HengNo ratings yet
- Steel Structure: Lecturer: Heng Piseth (MSC.)Document56 pagesSteel Structure: Lecturer: Heng Piseth (MSC.)Piseth HengNo ratings yet
- Development Length of Standard Hook in Tension (Only)Document1 pageDevelopment Length of Standard Hook in Tension (Only)Piseth HengNo ratings yet
- 5 Intro To Sustainablility & Sustainable ConstructionDocument18 pages5 Intro To Sustainablility & Sustainable ConstructionPiseth HengNo ratings yet
- Sustainable Construction Syllabus 2015Document3 pagesSustainable Construction Syllabus 2015Piseth HengNo ratings yet
- 8 Foundation: 8.1 Bearing CapacityDocument3 pages8 Foundation: 8.1 Bearing CapacityPiseth HengNo ratings yet
- Homework 3rd SteelDocument4 pagesHomework 3rd SteelPiseth HengNo ratings yet
- Reinforcement Concrete: HomeworkDocument6 pagesReinforcement Concrete: HomeworkPiseth HengNo ratings yet
- Reinforcement Concrete: HomeworkDocument14 pagesReinforcement Concrete: HomeworkPiseth HengNo ratings yet
- Reinforcement Concrete: HomeworkDocument6 pagesReinforcement Concrete: HomeworkPiseth HengNo ratings yet
- Bridge Engineering: HomeworkDocument7 pagesBridge Engineering: HomeworkPiseth HengNo ratings yet
- Sixth Project: Tunnel Mechanics and EngineeringDocument19 pagesSixth Project: Tunnel Mechanics and EngineeringPiseth HengNo ratings yet
- Homework 2Document3 pagesHomework 2Piseth HengNo ratings yet
- Thin-Walled Structures: Wei Lu, Pentti M Akel Ainen, Jyri Outinen, Zhongcheng MaDocument8 pagesThin-Walled Structures: Wei Lu, Pentti M Akel Ainen, Jyri Outinen, Zhongcheng MaPiseth HengNo ratings yet
- CNS - Types of CiphersDocument47 pagesCNS - Types of Ciphersmahesh palemNo ratings yet
- Section 3 Quiz, Database Design ORACLEDocument8 pagesSection 3 Quiz, Database Design ORACLEMostragNo ratings yet
- Chapter 11Document53 pagesChapter 11Vijendhar ReddyNo ratings yet
- Design Method of 6-Element Boundary Gain For LLC Resonant Converter of Electric VehicleDocument11 pagesDesign Method of 6-Element Boundary Gain For LLC Resonant Converter of Electric VehicleSh M AaqibNo ratings yet
- DPP 01 Periodic Table JH Sir-3576 PDFDocument5 pagesDPP 01 Periodic Table JH Sir-3576 PDFChessNo ratings yet
- 1 Egg & Egg Cookery LectureDocument15 pages1 Egg & Egg Cookery LectureErin DelavinNo ratings yet
- Midterm rp - Nguyễn Phú Minh Nhật - 20202795Document1 pageMidterm rp - Nguyễn Phú Minh Nhật - 20202795Minh Nhật100% (1)
- Modding ManualDocument25 pagesModding ManualSebastian SallerNo ratings yet
- Ar 4201 PDFDocument22 pagesAr 4201 PDFRiyanPratomuSiregarNo ratings yet
- HPLC and GC by S NarwadiyaDocument8 pagesHPLC and GC by S Narwadiyasnarwadiya100% (2)
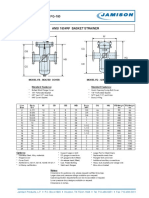
- FB-150 FQ-150 Basket StrainerDocument1 pageFB-150 FQ-150 Basket Strainerklich77No ratings yet
- Standard Test Method For Density and Void Content of Freshly Mixed Pervious ConcreteDocument4 pagesStandard Test Method For Density and Void Content of Freshly Mixed Pervious ConcreteManaswini VadlamaniNo ratings yet
- Astm Parte 5Document5 pagesAstm Parte 5Jimmy David Espinoza MejiaNo ratings yet
- 2020 Specimen Paper 1 Mark SchemeDocument16 pages2020 Specimen Paper 1 Mark SchemesarabNo ratings yet
- DTC P1200 Fuel Pump Relay/ECU Circuit MalfunctionDocument4 pagesDTC P1200 Fuel Pump Relay/ECU Circuit MalfunctiononealNo ratings yet
- FELPRO - Tablas-de-Torque - 035Document1 pageFELPRO - Tablas-de-Torque - 035Clodoaldo BiassioNo ratings yet
- XML SerializationDocument4 pagesXML Serializationapi-3748960No ratings yet
- Stacks - Quesues and DequesDocument23 pagesStacks - Quesues and DequesAbdallateef ShohdyNo ratings yet
- Vector AlgebraDocument7 pagesVector AlgebraDeeeNo ratings yet
- HashingDocument75 pagesHashingThz EsyyNo ratings yet
- The Mathematical Society of Serbia - 60 YearsDocument23 pagesThe Mathematical Society of Serbia - 60 YearsBranko Ma Branko TadicNo ratings yet
- Pedestrian Safety AnalysisDocument12 pagesPedestrian Safety Analysispartha sreekarNo ratings yet
- SolutionsDocument8 pagesSolutionsJavid BalakishiyevNo ratings yet
- Whinner y 1990Document5 pagesWhinner y 1990LGNo ratings yet
- Bluetooth PresentationDocument18 pagesBluetooth Presentationarjun_rathore8178No ratings yet
- Ordered Groups and Infinite Permutation Groups PDFDocument252 pagesOrdered Groups and Infinite Permutation Groups PDFmc180401877No ratings yet
- Technical Support Engineer - Home AssignmentDocument5 pagesTechnical Support Engineer - Home AssignmentRahul KohliNo ratings yet