You might also like
- Gain Enhancement of Axial Mode Helical AntennaDocument5 pagesGain Enhancement of Axial Mode Helical AntennaRaja SNo ratings yet
- Design and Analysis of A Tr-Band G-Shaped AntennaDocument6 pagesDesign and Analysis of A Tr-Band G-Shaped AntennaRaja SNo ratings yet
- 2012-C4-Edge Detection of Angiogram Images PDFDocument6 pages2012-C4-Edge Detection of Angiogram Images PDFRaja SNo ratings yet
- 2010-C2-An Improved Method of Segmentation Using FNL PDFDocument5 pages2010-C2-An Improved Method of Segmentation Using FNL PDFRaja SNo ratings yet
- Solution 1 - SignalsDocument3 pagesSolution 1 - SignalsRaja SNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- JSEA - Hydro Test - 2833Document13 pagesJSEA - Hydro Test - 2833Amit Sharma100% (1)
- B1 UNIT 1 Life Skills Video Teacher's NotesDocument1 pageB1 UNIT 1 Life Skills Video Teacher's NotesXime OlariagaNo ratings yet
- Pure Theory of Law Hans Kelson-Ltp..Document45 pagesPure Theory of Law Hans Kelson-Ltp..ShabnamNo ratings yet
- Skinner Reinforcement TodayDocument6 pagesSkinner Reinforcement TodayEnrique Hernández RosasNo ratings yet
- Report On Mango Cultivation ProjectDocument40 pagesReport On Mango Cultivation Projectkmilind007100% (1)
- Hatton National Bank PLC: Instance Type and TransmissionDocument2 pagesHatton National Bank PLC: Instance Type and TransmissiontaraNo ratings yet
- Teaching Profession Activities On Modules 1 2Document9 pagesTeaching Profession Activities On Modules 1 2Ana Lea AlmazanNo ratings yet
- What Is Situational Coaching and When To Use ItDocument3 pagesWhat Is Situational Coaching and When To Use ItBrian KamoedNo ratings yet
- Airsprings - TroubleshootingDocument4 pagesAirsprings - TroubleshootingCihan CantaşNo ratings yet
- I O OrganizationDocument26 pagesI O Organization08-Avinash SNo ratings yet
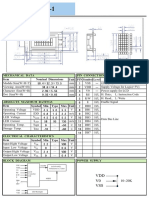
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocument1 pageV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNo ratings yet
- 843-Artificial Intelligence-Xi XiiDocument11 pages843-Artificial Intelligence-Xi XiiPɾαƙԋყαƚ PαɳԃҽყNo ratings yet
- Variable Frequency DriveDocument8 pagesVariable Frequency DriveNAYEEM100% (1)
- Certipur Certified Reference Material: Sodium Standard Solution 1000 MG/L NaDocument1 pageCertipur Certified Reference Material: Sodium Standard Solution 1000 MG/L NaJuan BenitezNo ratings yet
- Deep Face Lab PDFDocument29 pagesDeep Face Lab PDFHenry MorenoNo ratings yet
- 2013 - To and Fro. Modernism and Vernacular ArchitectureDocument246 pages2013 - To and Fro. Modernism and Vernacular ArchitecturesusanaNo ratings yet
- Introduction EthicsDocument26 pagesIntroduction EthicsLawrence MarquezNo ratings yet
- Assignment On Training & Development Process of Uniliver BangladeshDocument9 pagesAssignment On Training & Development Process of Uniliver BangladeshMohaiminul Islam50% (2)
- Implications of PropTechDocument107 pagesImplications of PropTechAnsar FarooqiNo ratings yet
- Reader of The Year - PDF: Learning Activity 1.1 PortfolioDocument20 pagesReader of The Year - PDF: Learning Activity 1.1 PortfolioAtenaNo ratings yet
- Multidimensional Flow Modeling of The Compression Test of A Gaede Pump Stage in The Viscous RegimeDocument9 pagesMultidimensional Flow Modeling of The Compression Test of A Gaede Pump Stage in The Viscous RegimeAsif HameedNo ratings yet
- Abu Khader Group ProposalDocument5 pagesAbu Khader Group ProposalChristine AghabiNo ratings yet
- Quickspecs: HP Probook 440 G2 Notebook PCDocument51 pagesQuickspecs: HP Probook 440 G2 Notebook PCAseemSharanNo ratings yet
- One Page Mistake ProofingDocument1 pageOne Page Mistake Proofingtuan mai vanNo ratings yet
- X20PS9600-en V1.20Document10 pagesX20PS9600-en V1.20PREVENCIONISTA HUAQUIANNo ratings yet
- Summative Test 3.1 Math 10Document2 pagesSummative Test 3.1 Math 10Christian DecenaNo ratings yet
- Music, Arts, Pe & HealthDocument2 pagesMusic, Arts, Pe & HealthEvan Maagad LutchaNo ratings yet
- Excavation and Trenching Implementation PlanDocument29 pagesExcavation and Trenching Implementation Planracing.phreakNo ratings yet
- Defense MechanismsDocument4 pagesDefense MechanismsTillu TilluNo ratings yet
- Oakite 61B - TIDocument2 pagesOakite 61B - TI顏煥杰No ratings yet