You might also like
- Tribological Processes in the Valve Train Systems with Lightweight Valves: New Research and ModellingFrom EverandTribological Processes in the Valve Train Systems with Lightweight Valves: New Research and ModellingRating: 1.5 out of 5 stars1.5/5 (2)
- Lab Manual For Kinematics of MachinesDocument18 pagesLab Manual For Kinematics of Machinesshailendra_236No ratings yet
- Module 1 - MechanismsDocument41 pagesModule 1 - MechanismsB03Kavya MNo ratings yet
- Kom Lab Manuals FinalDocument47 pagesKom Lab Manuals Finalappannusa0% (1)
- UNIT 1. Introduction To KOM PDFDocument40 pagesUNIT 1. Introduction To KOM PDFAravind MuddebihalNo ratings yet
- Theory of Machines - Lab ManualDocument28 pagesTheory of Machines - Lab ManualHoneyNo ratings yet
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismDocument43 pagesPimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaNo ratings yet
- Me6401 Kom Notes RejinpaulDocument64 pagesMe6401 Kom Notes RejinpaulkjsdjsdaNo ratings yet
- Kinematics of MachineryDocument64 pagesKinematics of MachineryarulmuruganNo ratings yet
- TOM EME-653 lAB MANUAL1Document41 pagesTOM EME-653 lAB MANUAL1kotika_somarajuNo ratings yet
- Lecturer Notes - Kinematics of MachineryDocument65 pagesLecturer Notes - Kinematics of Machineryehsan_shameli100% (1)
- Laboratory ManualDocument24 pagesLaboratory ManualBibhuti BhusanNo ratings yet
- Mechanical Actuation SystemDocument34 pagesMechanical Actuation Systemdildar123100% (2)
- Selvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsDocument30 pagesSelvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsVijayan GopalsamyNo ratings yet
- Kinematics of MachineryDocument64 pagesKinematics of MachineryStar SathishNo ratings yet
- Me6401 KomDocument128 pagesMe6401 KomThomas LafontaineNo ratings yet
- Kinematics of MachineryDocument65 pagesKinematics of Machinerykumaravel07No ratings yet
- Tom ImpDocument27 pagesTom Impcorruptmail760No ratings yet
- Kinematic of Machines Part ADocument13 pagesKinematic of Machines Part Adraj1875977No ratings yet
- TheoryDocument21 pagesTheoryAli Faiz AbotiheenNo ratings yet
- TOM Exp.Document9 pagesTOM Exp.Aneesh KumarNo ratings yet
- Econtents of TomDocument88 pagesEcontents of TomSuraj 1212No ratings yet
- MEC291 Dynamic Crank and Slider2Document9 pagesMEC291 Dynamic Crank and Slider2Amir ArsyadNo ratings yet
- 10.kom Guide Book MvreddyDocument41 pages10.kom Guide Book MvreddyVenkateswar Reddy MallepallyNo ratings yet
- KomDocument12 pagesKomSasi KumarNo ratings yet
- CHAPTER THREE ACTUATOR InterfacingDocument40 pagesCHAPTER THREE ACTUATOR InterfacingdanielNo ratings yet
- Module 1 & First Half of 2 - Two Marks Q & ADocument8 pagesModule 1 & First Half of 2 - Two Marks Q & AMOHAMMED ZAHID BNo ratings yet
- Kinematics of Machinery NotesDocument65 pagesKinematics of Machinery NotesVenkatesh Rajamani100% (1)
- Dynamics Lab ManualDocument48 pagesDynamics Lab ManualmuthurajaNo ratings yet
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNo ratings yet
- Bybliographycal Research of Analysis of MechanismsDocument9 pagesBybliographycal Research of Analysis of MechanismsJuanca SolorioNo ratings yet
- Mechanical Actuation SystemDocument34 pagesMechanical Actuation SystemRaghav VaswaniNo ratings yet
- Inversion of 4 Bar MechanismDocument6 pagesInversion of 4 Bar MechanismMegh Bantawa100% (1)
- KOM LAB IVSem PDFDocument24 pagesKOM LAB IVSem PDFvenkatksr1987No ratings yet
- AE2201 2marks PDFDocument30 pagesAE2201 2marks PDFSathis KumarNo ratings yet
- Syllabus (New2013 Pattern) - TOM-IDocument14 pagesSyllabus (New2013 Pattern) - TOM-IAkshayNo ratings yet
- Mechanisms Final ReportDocument44 pagesMechanisms Final ReportOmar SaleemNo ratings yet
- Table of Contents:-: - o o o o o o Singal Slider Mechanisms o Double Slider MechanismsDocument12 pagesTable of Contents:-: - o o o o o o Singal Slider Mechanisms o Double Slider MechanismsRajesh PowerNo ratings yet
- Automation & Robotics (RME078) : Lecture Notes OnDocument10 pagesAutomation & Robotics (RME078) : Lecture Notes Onمقدس ألم Μυφυαδδας ΑιαΜNo ratings yet
- Kom Lecture NotesDocument163 pagesKom Lecture NotesgvnagamaniNo ratings yet
- Me2203 PDFDocument31 pagesMe2203 PDFNallappan Rajj ANo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- 21me603 2me06Document35 pages21me603 2me06Devarsh SuchakNo ratings yet
- Kom Unit 1 PDFDocument18 pagesKom Unit 1 PDFDEVENDRA SINGHNo ratings yet
- Mechanical Actuation SystemDocument34 pagesMechanical Actuation SystemAbu AryanNo ratings yet
- CH 4Document19 pagesCH 4Yan Mg MgNo ratings yet
- Unit-I TomDocument37 pagesUnit-I TomBandi KumarreddyNo ratings yet
- VCS REPORT FinalDocument7 pagesVCS REPORT Finalasd108533No ratings yet
- ME-222-02 (Simple Mechanism)Document16 pagesME-222-02 (Simple Mechanism)Imran TahirNo ratings yet
- Mechanical Actuation SystemsDocument14 pagesMechanical Actuation SystemsnkchandruNo ratings yet
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- Bme Lab Manual FeDocument37 pagesBme Lab Manual FeArpit PangariaNo ratings yet
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Transfer Matrix Method for Multibody Systems: Theory and ApplicationsFrom EverandTransfer Matrix Method for Multibody Systems: Theory and ApplicationsNo ratings yet
- Semi-Active Suspension Control Design for VehiclesFrom EverandSemi-Active Suspension Control Design for VehiclesRating: 5 out of 5 stars5/5 (1)
- Ey Apply Ifrs Crypto Assets Update October2021Document35 pagesEy Apply Ifrs Crypto Assets Update October2021dab111No ratings yet
- Measurements PDFDocument18 pagesMeasurements PDFdab111No ratings yet
- Tutorial I SolutionDocument3 pagesTutorial I Solutiondab111No ratings yet
- Fins SolutionsDocument5 pagesFins Solutionsdab111No ratings yet
- Tutorial 6: Me 313: Dynamics of Machinery Tutorial ProblemsDocument4 pagesTutorial 6: Me 313: Dynamics of Machinery Tutorial Problemsdab111No ratings yet
- Development of Standard Water Mills in Uttaranchal: R.P. Saini and Arun KumarDocument12 pagesDevelopment of Standard Water Mills in Uttaranchal: R.P. Saini and Arun Kumardab111No ratings yet
- Assignment1 Part1 ME311Document5 pagesAssignment1 Part1 ME311dab111No ratings yet
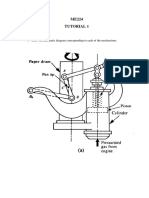
- ME224 Tutorial 1: 1. Draw The Kinematic Diagram Corresponding To Each of The MechanismsDocument7 pagesME224 Tutorial 1: 1. Draw The Kinematic Diagram Corresponding To Each of The Mechanismsdab111No ratings yet
- Indian Institute of Technology Guwahati: Schp/04 Form To Certify/Forwarding Outside ScholarshipDocument1 pageIndian Institute of Technology Guwahati: Schp/04 Form To Certify/Forwarding Outside Scholarshipdab111No ratings yet
- MA 201 (Complex Analysis) Lecture - 01Document33 pagesMA 201 (Complex Analysis) Lecture - 01dab111No ratings yet
- Variational Principle For A Particle in A BoxDocument4 pagesVariational Principle For A Particle in A BoxajparnaibaNo ratings yet
- PSL Rheotek Catalogue 2015 Lowres - 2Document28 pagesPSL Rheotek Catalogue 2015 Lowres - 2sohaib mughalNo ratings yet
- Multiple Choice Question Material ScienceDocument2 pagesMultiple Choice Question Material Sciencemanish_agr8567% (3)
- Seismic Earth Pressures Against Structures With Restrained Displacement - Ortigosa and MusanteDocument9 pagesSeismic Earth Pressures Against Structures With Restrained Displacement - Ortigosa and MusanteAA_BB_HHNo ratings yet
- SPE 131137 Steady-State Heat Transfer Models For Fully and Partially Buried PipelinesDocument27 pagesSPE 131137 Steady-State Heat Transfer Models For Fully and Partially Buried Pipelinesmostafa shahrabi100% (1)
- Ball Joint Failure DocumentDocument2 pagesBall Joint Failure DocumentAbeer Darhous100% (1)
- DR Rajendra PatrikarDocument67 pagesDR Rajendra Patrikarapi-20005351No ratings yet
- Ecodesign Requirements For Ventilation UnitsDocument25 pagesEcodesign Requirements For Ventilation UnitsTwo and a HalfNo ratings yet
- C-Arm Parts and PrinciplesDocument10 pagesC-Arm Parts and PrinciplesErshad SohailNo ratings yet
- 4470 Lecture 5 2013 PDFDocument23 pages4470 Lecture 5 2013 PDFamanpreetNo ratings yet
- Control of Corrosion in Cooling WatersDocument93 pagesControl of Corrosion in Cooling Waterssevero97No ratings yet
- Pipe Table For Smart EngineersDocument12 pagesPipe Table For Smart EngineersJade ClemenoNo ratings yet
- Materials 10 00676 v2 PDFDocument49 pagesMaterials 10 00676 v2 PDFUgur KayaNo ratings yet
- Wind Dynamic AnalysisDocument17 pagesWind Dynamic AnalysisavinashpataskarNo ratings yet
- Pre Board - Science - Class 10 QPDocument5 pagesPre Board - Science - Class 10 QP10E Yuvan Sarabeshan Thirumeninathan [3383]No ratings yet
- EAPSDocument7 pagesEAPSAerospace Technical AcademyNo ratings yet
- Ground Coupled Heat Exchanger Air Conditioning System A Study PDFDocument5 pagesGround Coupled Heat Exchanger Air Conditioning System A Study PDFSatyendraNo ratings yet
- Corrosion On Ships and Countermeasures - Dwidaya KorosindoDocument6 pagesCorrosion On Ships and Countermeasures - Dwidaya KorosindoMekineNo ratings yet
- Radphysics 1Document5 pagesRadphysics 1Angelica BastesNo ratings yet
- GEIT 40008GB Widelatitude Film AGFADocument2 pagesGEIT 40008GB Widelatitude Film AGFARolando Nuñez MonrroyNo ratings yet
- Epolam 5015Document2 pagesEpolam 5015Eduardo JoseNo ratings yet
- Structured PackingDocument8 pagesStructured PackingUsama IqbalNo ratings yet
- Charny - Mathematical Models of Bioheat TransferDocument137 pagesCharny - Mathematical Models of Bioheat TransferMadalena PanNo ratings yet
- Effect of Turbocharging On Exhaust Brake Performance in An AutomobileDocument6 pagesEffect of Turbocharging On Exhaust Brake Performance in An Automobileabhisaxena93No ratings yet
- 3 Angularly Deflected Double Bell Coupling Joint: New Product ofDocument2 pages3 Angularly Deflected Double Bell Coupling Joint: New Product ofJose Leo MissionNo ratings yet
- Theory of Irregular Impedance Waveguides, Generalised Method of Separation of Variables - Zaginaylov Et Al (MMET 2014)Document6 pagesTheory of Irregular Impedance Waveguides, Generalised Method of Separation of Variables - Zaginaylov Et Al (MMET 2014)dpshepherdNo ratings yet
- CBR OptikDocument8 pagesCBR OptikNuriyaniNo ratings yet
- Glass Reference ChartDocument7 pagesGlass Reference ChartcjNo ratings yet
- ENES 220 - Mechanics of Materials Spring 2001 April 20, 2001 Exam #2Document4 pagesENES 220 - Mechanics of Materials Spring 2001 April 20, 2001 Exam #2Ehsan WasimNo ratings yet
- Physics Booklet For Jee Neet & Boards: Electrostatics Electric ChargeDocument128 pagesPhysics Booklet For Jee Neet & Boards: Electrostatics Electric ChargedhruvNo ratings yet