You might also like
- LRM Toolbox For ArcGIS ManualDocument7 pagesLRM Toolbox For ArcGIS ManualIoana PavelNo ratings yet
- Manual LoD2 Building Modelling PDFDocument15 pagesManual LoD2 Building Modelling PDFnugrohoNo ratings yet
- .Archassignment 5 RoutePlanner v21.1Document6 pages.Archassignment 5 RoutePlanner v21.1Muzammil LiaquatNo ratings yet
- H34 Assign7Pathfinder PDFDocument8 pagesH34 Assign7Pathfinder PDFrahulmnnit_csNo ratings yet
- T DriveDocument28 pagesT DriveMeenachi SundaramNo ratings yet
- Stream Network and Watershed Delineation Using Spatial Analyst Hydrology ToolsDocument16 pagesStream Network and Watershed Delineation Using Spatial Analyst Hydrology ToolsGeo SpatialistNo ratings yet
- Plotting On Google Static Maps in R: Markus Loecher Sense Networks December 13, 2010Document7 pagesPlotting On Google Static Maps in R: Markus Loecher Sense Networks December 13, 2010Phellipe CruzNo ratings yet
- Experiment-7: AIM: Write A Program To Implement Link State Routing AlgorithmDocument4 pagesExperiment-7: AIM: Write A Program To Implement Link State Routing AlgorithmVaibhav KumarNo ratings yet
- A Survey Paper On OpenGL ESDocument4 pagesA Survey Paper On OpenGL ESEditor IJRITCCNo ratings yet
- R3D ManualDocument45 pagesR3D ManualFranjo BanderovićNo ratings yet
- Design of A 32x64-Bit SRAM - Background: Elad Alon 141Document9 pagesDesign of A 32x64-Bit SRAM - Background: Elad Alon 141Christopher Patterson100% (1)
- GIS F2E Python - Features To Edge List in Python - Installation and TutorialDocument5 pagesGIS F2E Python - Features To Edge List in Python - Installation and TutorialsherlockhishamNo ratings yet
- Course DesignDocument23 pagesCourse Designaimn1766No ratings yet
- Unit 5 Java Programming With LinuxDocument42 pagesUnit 5 Java Programming With Linuxmelbin mathewNo ratings yet
- GM Unit 3,4,5Document39 pagesGM Unit 3,4,5PREMKANTH ISNo ratings yet
- Udacity - Flying NDDocument6 pagesUdacity - Flying NDRishi BhalodiaNo ratings yet
- CG ManualDocument39 pagesCG Manualsanthosh reddyNo ratings yet
- RIP Riverbed LabDocument13 pagesRIP Riverbed LabnekaNo ratings yet
- Assessment Item 1: InstructionsDocument4 pagesAssessment Item 1: InstructionsLendry NormanNo ratings yet
- Assignment 2Document4 pagesAssignment 2vivek1107khullarNo ratings yet
- 15CSL68 - Computer Graphics Lab Manual: Mr. Shankar RDocument54 pages15CSL68 - Computer Graphics Lab Manual: Mr. Shankar RCharizard FreakNo ratings yet
- CG Lab InfoDocument16 pagesCG Lab InfoMohammed Adnan khanNo ratings yet
- DSAD Application ProblemDocument4 pagesDSAD Application ProblemAzhar Mumrez0% (1)
- R & CIM Exam-I3 - Q$ADocument7 pagesR & CIM Exam-I3 - Q$AKamarul NizamNo ratings yet
- 260 Assignment 71Document10 pages260 Assignment 71very confusedNo ratings yet
- ADBT MCA Mumbai University Idol Sem 4Document45 pagesADBT MCA Mumbai University Idol Sem 4Unknown100% (1)
- Assignment 1 Formatted-V4Document4 pagesAssignment 1 Formatted-V4Javed AkhterNo ratings yet
- File-549830172-549830172 Assignment3 6597654431802515Document3 pagesFile-549830172-549830172 Assignment3 6597654431802515CHI-SQUARED STATISTICSNo ratings yet
- Geographical Information System ProjectDocument15 pagesGeographical Information System ProjectMohd Fadhil MusbahNo ratings yet
- Arduino - PCB For Android Hexapod RobotDocument4 pagesArduino - PCB For Android Hexapod RobotdiagoesNo ratings yet
- R2D - Mesh: by Terry Waddle and Peter Steffler U.S. Geological Survey September, 2002Document32 pagesR2D - Mesh: by Terry Waddle and Peter Steffler U.S. Geological Survey September, 2002Ueliquis Jose da SilvaNo ratings yet
- VIC Routing Model Pre-Processing For Flow Direction GenerationDocument5 pagesVIC Routing Model Pre-Processing For Flow Direction GenerationpchrisrlNo ratings yet
- Geospatial Modeling EnvironmentDocument31 pagesGeospatial Modeling EnvironmentMas Inoenk Nurdin SulistiyonoNo ratings yet
- C ++ Programming Assignment SampleDocument6 pagesC ++ Programming Assignment SampleJack ClarkNo ratings yet
- MX RoadDocument28 pagesMX RoadTapas0% (1)
- Graphic MidtermDocument5 pagesGraphic MidtermKhaijin LimNo ratings yet
- Arc HydroDocument44 pagesArc Hydrocrchiriboga05No ratings yet
- E0 271: Graphics and Visualization Assignment #2: GoalsDocument2 pagesE0 271: Graphics and Visualization Assignment #2: GoalsSsai Manojh KumarNo ratings yet
- Spatial NetworksDocument22 pagesSpatial NetworksKrishna GautamNo ratings yet
- GSM - Signaling & Protocol Analysis (RAN & Mobile Station)Document4 pagesGSM - Signaling & Protocol Analysis (RAN & Mobile Station)Omotayo AmopeNo ratings yet
- CG Lab PDFDocument61 pagesCG Lab PDFanantha innanjeNo ratings yet
- Computer Graphics (CG CHAP 3)Document15 pagesComputer Graphics (CG CHAP 3)Vuggam Venkatesh0% (1)
- A Realistic 2D Drawing System: Online Submission ID: 513Document8 pagesA Realistic 2D Drawing System: Online Submission ID: 513Nadeem Khan100% (1)
- Alex's Anthology of Algorithms (Draft)Document50 pagesAlex's Anthology of Algorithms (Draft)Anonymous fvfjOfNo ratings yet
- Introduction To System ProgrammingDocument50 pagesIntroduction To System ProgrammingSaurabh Iyer100% (1)
- Self A CH 6 7Document2 pagesSelf A CH 6 7Nomsa MwayengaNo ratings yet
- DSP ProjectDocument23 pagesDSP Projectrt21ecb0b48No ratings yet
- Bi Weekly Coverage Prediction Guide - v2Document35 pagesBi Weekly Coverage Prediction Guide - v2Madhan MuniandyNo ratings yet
- Software Manual TemplateDocument14 pagesSoftware Manual Template-Timur Sahadewa-No ratings yet
- 1.4.1.1 We Really Could Use A Map Instructions - ILMDocument3 pages1.4.1.1 We Really Could Use A Map Instructions - ILMJustk HonorNo ratings yet
- AutoCAD HomeworkDocument2 pagesAutoCAD Homeworkjeff100% (1)
- Ai - Reassesment Question - FinalDocument3 pagesAi - Reassesment Question - FinalMs BukharyNo ratings yet
- Network Analyst TutorialDocument119 pagesNetwork Analyst TutorialEduard Matei100% (2)
- Caffa3d MBDocument16 pagesCaffa3d MBJeremy Dudley100% (1)
- FlowPeaks GuideDocument8 pagesFlowPeaks GuideKavan KohNo ratings yet
- Handout - 10903 - AU 2015 - CI10903 - Ramp It Up - Advanced Corridor Design in Civil 3DDocument56 pagesHandout - 10903 - AU 2015 - CI10903 - Ramp It Up - Advanced Corridor Design in Civil 3DkovaryNo ratings yet
- Dijkstra's Algorithm Implementation in Digital ASIC.Document7 pagesDijkstra's Algorithm Implementation in Digital ASIC.Ajit NarwalNo ratings yet
- LKPD News Item Siklus 3 P1Document5 pagesLKPD News Item Siklus 3 P1elvianayunita18No ratings yet
- SSR Directions s1Document2 pagesSSR Directions s1api-327965506No ratings yet
- English Beginner 7-12 Unit ParaticeDocument10 pagesEnglish Beginner 7-12 Unit ParaticeAyxan Xalidoğlu100% (2)
- Karamysheva I. D. Contrastive Grammar of English and Ukrainian LanguagesDocument322 pagesKaramysheva I. D. Contrastive Grammar of English and Ukrainian LanguagesRoma Romanyuk89% (38)
- How To Overcome Frustration 28 6 21Document9 pagesHow To Overcome Frustration 28 6 21Maoping Art CraftyNo ratings yet
- VT1682 Console and One Bus 8+ 16 Systme: General DescriptionDocument7 pagesVT1682 Console and One Bus 8+ 16 Systme: General DescriptionRafael GarciaNo ratings yet
- Simple ApprehensionDocument1 pageSimple ApprehensionAllan MacacapagalNo ratings yet
- Carboxylic Acid Derivatives - NASDocument24 pagesCarboxylic Acid Derivatives - NASSara NimareNo ratings yet
- PbifinalpaperDocument10 pagesPbifinalpaperapi-277946598No ratings yet
- TensesDocument2 pagesTensesMarcu RaileanNo ratings yet
- Squares and Cube RootDocument2 pagesSquares and Cube RootEmyren ApuyaNo ratings yet
- Irregular Verbs PDFDocument1 pageIrregular Verbs PDFSeckin CicekNo ratings yet
- Sports: Fill in The Crossword and Find The Hidden WordsDocument2 pagesSports: Fill in The Crossword and Find The Hidden WordsArturo Fuentes BravoNo ratings yet
- SDcardDocument5 pagesSDcardGanesh KumarNo ratings yet
- Soal PTS Xi SMT Genap 2021Document6 pagesSoal PTS Xi SMT Genap 2021Kamsir RunNo ratings yet
- Home New PeopleSoft QADocument78 pagesHome New PeopleSoft QAAvinash SablaniNo ratings yet
- SkilliZee Class 4 Journal Doodle Draft 3Document70 pagesSkilliZee Class 4 Journal Doodle Draft 3rashi sharmaNo ratings yet
- Introduction To Git: Architecture of CVCSDocument34 pagesIntroduction To Git: Architecture of CVCSamit guptaNo ratings yet
- Gangadhar Meher 2012 9Document14 pagesGangadhar Meher 2012 9thatsnature32No ratings yet
- MineduDocument21 pagesMineduJose ReneNo ratings yet
- Florituras 1Document33 pagesFlorituras 1BERNARDITA MARTÍNEZNo ratings yet
- On Dell HymesDocument17 pagesOn Dell HymesFiktivni Fikus100% (1)
- Quasar Chunawala: ObjectiveDocument2 pagesQuasar Chunawala: ObjectiveQuasar ChunawalaNo ratings yet
- Andalusi Muwashshaha and KharjaDocument176 pagesAndalusi Muwashshaha and KharjaMahomad Abenjúcef100% (2)
- Reggaeton (2009) Raquel Z. RiveraDocument514 pagesReggaeton (2009) Raquel Z. RiveraEduardo Eloy Ramirez Villegas100% (1)
- GSM Based Led Scrolling Display Board PDFDocument14 pagesGSM Based Led Scrolling Display Board PDFsabNo ratings yet
- Incisive Enterprise Verifier DatasheetDocument7 pagesIncisive Enterprise Verifier DatasheetSamNo ratings yet
- Pronoun (Basic) (Part-1) : CAREERWILL APP) My Students Are God's Gift To MeDocument19 pagesPronoun (Basic) (Part-1) : CAREERWILL APP) My Students Are God's Gift To MeGod Frist50% (2)
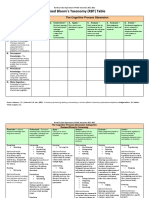
- RBT CognitiveProcesses Knowledge Definitions PDFDocument4 pagesRBT CognitiveProcesses Knowledge Definitions PDFAmadh Pereyra100% (1)
- Cisco Small Business IP Telephony Provisioning GuideDocument116 pagesCisco Small Business IP Telephony Provisioning GuideJason StevensonNo ratings yet
- Coders at Work: Reflections on the Craft of ProgrammingFrom EverandCoders at Work: Reflections on the Craft of ProgrammingRating: 4 out of 5 stars4/5 (151)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerFrom EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerRating: 5 out of 5 stars5/5 (1)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleFrom EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleRating: 4 out of 5 stars4/5 (16)
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.From EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Rating: 5 out of 5 stars5/5 (2)
- Once Upon an Algorithm: How Stories Explain ComputingFrom EverandOnce Upon an Algorithm: How Stories Explain ComputingRating: 4 out of 5 stars4/5 (43)
- What Algorithms Want: Imagination in the Age of ComputingFrom EverandWhat Algorithms Want: Imagination in the Age of ComputingRating: 3.5 out of 5 stars3.5/5 (41)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Blockchain Basics: A Non-Technical Introduction in 25 StepsFrom EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsRating: 4.5 out of 5 stars4.5/5 (24)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersFrom EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersRating: 5 out of 5 stars5/5 (7)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!From EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Rating: 4.5 out of 5 stars4.5/5 (2)
- Python Programming : How to Code Python Fast In Just 24 Hours With 7 Simple StepsFrom EverandPython Programming : How to Code Python Fast In Just 24 Hours With 7 Simple StepsRating: 3.5 out of 5 stars3.5/5 (54)
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekFrom EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekRating: 4.5 out of 5 stars4.5/5 (7)
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)From EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Rating: 5 out of 5 stars5/5 (1)
- GAMEDEV: 10 Steps to Making Your First Game SuccessfulFrom EverandGAMEDEV: 10 Steps to Making Your First Game SuccessfulRating: 4.5 out of 5 stars4.5/5 (12)
- Problem Solving in C and Python: Programming Exercises and Solutions, Part 1From EverandProblem Solving in C and Python: Programming Exercises and Solutions, Part 1Rating: 4.5 out of 5 stars4.5/5 (2)
- Python: For Beginners A Crash Course Guide To Learn Python in 1 WeekFrom EverandPython: For Beginners A Crash Course Guide To Learn Python in 1 WeekRating: 3.5 out of 5 stars3.5/5 (23)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)