You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Zig Zag Transformer - Manual CalculationDocument2 pagesZig Zag Transformer - Manual Calculationsathyasony100% (1)
- ABB UnitrolDocument12 pagesABB UnitrolRogério Ferro Do NascimentoNo ratings yet
- Enquiry For Manufacture, Testing & Supply of Generator Power and Auxiliary Transformers For Our Ongoing Three Projects in NepalDocument7 pagesEnquiry For Manufacture, Testing & Supply of Generator Power and Auxiliary Transformers For Our Ongoing Three Projects in NepalPritam SinghNo ratings yet
- Item Description Unit Qty 1 Turbine & AuxiliariesDocument4 pagesItem Description Unit Qty 1 Turbine & AuxiliariesPritam SinghNo ratings yet
- SNO Project ItemDocument9 pagesSNO Project ItemPritam SinghNo ratings yet
- Quotation (01.08.2016)Document5 pagesQuotation (01.08.2016)Pritam SinghNo ratings yet
- Quotation (01.08.2016)Document5 pagesQuotation (01.08.2016)Pritam SinghNo ratings yet
- Purchase OrderDocument7 pagesPurchase OrderRisa IchaNo ratings yet
- Comparison For CTS and PtsDocument6 pagesComparison For CTS and PtsPritam SinghNo ratings yet
- InfoDocument1 pageInfoCharles ChavesNo ratings yet
- 1.0 Cover - PageDocument2 pages1.0 Cover - PageKoushik DeyNo ratings yet
- Sr. No. Item Description MakeDocument10 pagesSr. No. Item Description MakePritam SinghNo ratings yet
- FM BoosterDocument1 pageFM BoostermallipeddijNo ratings yet
- 3.3 Selection of Switchyard Equipment For SHPDocument99 pages3.3 Selection of Switchyard Equipment For SHPKrishna Mohan Sharma100% (1)
- Canada Micro Hydro GuideDocument56 pagesCanada Micro Hydro Guidenavinchopra1986100% (5)
- SF Gas Insulated Ring Main Unit RMUDocument24 pagesSF Gas Insulated Ring Main Unit RMUr_mukuyuNo ratings yet
- Generation Voltage 6.6 KV Generator Capacity 2500 KW Genrator Current 257.2938 AMP at 95% Voltage 270.8355Document1 pageGeneration Voltage 6.6 KV Generator Capacity 2500 KW Genrator Current 257.2938 AMP at 95% Voltage 270.8355Pritam SinghNo ratings yet
- Upst100-Gtp 10Document2 pagesUpst100-Gtp 10Pritam SinghNo ratings yet
- Electrical SampleDocument2 pagesElectrical SamplePritam SinghNo ratings yet
- General Specification For Ring Main Unit Switchgear, From 3.3 To 13.8 KVDocument9 pagesGeneral Specification For Ring Main Unit Switchgear, From 3.3 To 13.8 KVPritam SinghNo ratings yet
- Star Artts PDFDocument16 pagesStar Artts PDFTony FahmyNo ratings yet
- I El 217Document74 pagesI El 217selvamuthukumarNo ratings yet
- IndexDocument1 pageIndexPritam SinghNo ratings yet
- LA SpecsDocument2 pagesLA SpecsPritam SinghNo ratings yet
- IndexDocument1 pageIndexPritam SinghNo ratings yet
- LA SpecsDocument2 pagesLA SpecsPritam SinghNo ratings yet
- Decs 250 PDFDocument350 pagesDecs 250 PDFPritam SinghNo ratings yet
- Avc63 12 PDFDocument4 pagesAvc63 12 PDFZinou ZizouNo ratings yet
- FM BoosterDocument1 pageFM BoostermallipeddijNo ratings yet
- Voltage Regulator DECS-100 ManuelDocument81 pagesVoltage Regulator DECS-100 Manuelctsak100% (1)
- NSK BearingDocument138 pagesNSK BearingPritam SinghNo ratings yet
- Syllabus - EMT1255 - Spring 2021Document4 pagesSyllabus - EMT1255 - Spring 2021joeysaladsiscoolNo ratings yet
- Arihant, Ncert ExemplarDocument269 pagesArihant, Ncert Exemplarhghhbg100% (7)
- Stpa 003Document25 pagesStpa 003Noel Alejandro Cordova RangelNo ratings yet
- ESP ManualDocument25 pagesESP ManualAnoop Tiwari100% (4)
- 07.06.21 - SR - Sankalp & ALL - WTM-5 Q.paper With Key & Sol'sDocument23 pages07.06.21 - SR - Sankalp & ALL - WTM-5 Q.paper With Key & Sol'sNishith Reddy 316No ratings yet
- TDJH 182018de 65f (Valdemar)Document1 pageTDJH 182018de 65f (Valdemar)rauxmataNo ratings yet
- 4.1 Wireless Devices For McomDocument22 pages4.1 Wireless Devices For McomPOOJA GNo ratings yet
- Service Manual 252 769 480 - ADocument146 pagesService Manual 252 769 480 - AariserplNo ratings yet
- CATALOG SmartronDocument16 pagesCATALOG Smartronmuhamad noferdiNo ratings yet
- Service Manual: HammondDocument33 pagesService Manual: HammondPrinceNo ratings yet
- Astm G42 PDFDocument142 pagesAstm G42 PDFWilliam Lozano Mariño100% (1)
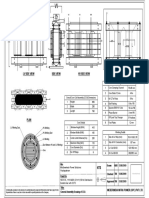
- 100KVA GA DrawingDocument1 page100KVA GA DrawingMahidhar TalapaneniNo ratings yet
- CN803Document7 pagesCN803RogeriomgoNo ratings yet
- Model:: AE4425Y-GS1ADocument8 pagesModel:: AE4425Y-GS1AEvandro Jva compressoresNo ratings yet
- Wind Turbine Modelling Approaches For Dynamic Power System SimulationsDocument7 pagesWind Turbine Modelling Approaches For Dynamic Power System SimulationsYounes AdnaniNo ratings yet
- Certificate of Compliance: Tai PhamDocument5 pagesCertificate of Compliance: Tai Phamesteban moncayo100% (1)
- Mr. S. N. Mughal Mr. Tasaduq Hussain Mr. Ahmed Riyaz Prof. Asif HusainDocument2 pagesMr. S. N. Mughal Mr. Tasaduq Hussain Mr. Ahmed Riyaz Prof. Asif HusainChaudhary GauravNo ratings yet
- Electrical Machine Design - A. K. SawhneyDocument134 pagesElectrical Machine Design - A. K. SawhneyDebarshi DuttaNo ratings yet
- HFC-O CLI SeminarDocument45 pagesHFC-O CLI SeminarAnh Bien NguyenNo ratings yet
- STTH6003CWDocument7 pagesSTTH6003CWjesusNo ratings yet
- Generator Sizing Guide 2013Document32 pagesGenerator Sizing Guide 2013DAVIDNo ratings yet
- KBR009 SLDDocument1 pageKBR009 SLDGhufran Ud DinNo ratings yet
- Review of Computers in Process Control 1.1 Data LoggersDocument30 pagesReview of Computers in Process Control 1.1 Data Loggerssisai12u242No ratings yet
- Module 3: Induction Motor Drives: SyllabusDocument8 pagesModule 3: Induction Motor Drives: SyllabusManoj SkNo ratings yet
- Mosfet and BJT ReportDocument10 pagesMosfet and BJT ReportUmar AkhtarNo ratings yet
- Nemef Leaflet EL600 Fail-Save and Fail SecureDocument2 pagesNemef Leaflet EL600 Fail-Save and Fail Securemichael magdyNo ratings yet
- Single Line Diagram 150/20 KV Gi Muka Kuning: Tj. Kasam 1 2 Panaran 1 2Document14 pagesSingle Line Diagram 150/20 KV Gi Muka Kuning: Tj. Kasam 1 2 Panaran 1 2Anugrah PratamaNo ratings yet
- 15CS32 SyllabusDocument2 pages15CS32 SyllabuspramelaNo ratings yet
- TransformersDocument43 pagesTransformersDavid LeviNo ratings yet