You might also like
- Group-5 Obe PresentationDocument15 pagesGroup-5 Obe PresentationImran AhmedNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Group-5 Obe PresentationDocument15 pagesGroup-5 Obe PresentationImran AhmedNo ratings yet
- HWCH8P2Document9 pagesHWCH8P2Jonathan AdamsNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Process Dynamics and Control, Ch. 11 Solution ManualDocument29 pagesProcess Dynamics and Control, Ch. 11 Solution ManualBen Spearman100% (9)
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1Document3 pagesControl Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1cataiceNo ratings yet
- Self Tuning Problem SolutionDocument21 pagesSelf Tuning Problem SolutionLevi Aditya NugrahaNo ratings yet
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- Thermodinamika Dan Mesin KalorDocument12 pagesThermodinamika Dan Mesin KalorMade AgusNo ratings yet
- U G M C S: Cohen & Coon Controller Tuning ExampleDocument7 pagesU G M C S: Cohen & Coon Controller Tuning ExampleBrigitte Y. Ayllón RojasNo ratings yet
- Chapter 2Document10 pagesChapter 2floriscalcNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Process Dynamics and Control Seborg 2nd Ch06 PDFDocument43 pagesProcess Dynamics and Control Seborg 2nd Ch06 PDFRon PascualNo ratings yet
- Hyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationFrom EverandHyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationNo ratings yet
- Soal Peristiwa Perpindahan LanjutDocument8 pagesSoal Peristiwa Perpindahan LanjutRahmanda LuthfiaNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Aircraft PropulsionDocument23 pagesAircraft Propulsionmentalxfiction100% (2)
- FounDocument18 pagesFounSisay GashaNo ratings yet
- Prestressed Example LossesDocument14 pagesPrestressed Example LossesmagdyamdbNo ratings yet
- Homework 4Document12 pagesHomework 4UsmanNo ratings yet
- Aircraft Propulsion PDF FreeDocument23 pagesAircraft Propulsion PDF FreeSai ManiNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocument14 pagesWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsShubham mishraNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Advanced Control: Modeling Problem by Using MATLABDocument29 pagesAdvanced Control: Modeling Problem by Using MATLABwillys8No ratings yet
- Laboratory Exercises in Astronomy: Solutions and AnswersFrom EverandLaboratory Exercises in Astronomy: Solutions and AnswersNo ratings yet
- Prestressed - Solved ExamplesDocument4 pagesPrestressed - Solved ExamplesSofya Sa91% (11)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Solution Manual - Control Systems by GopalDocument0 pagesSolution Manual - Control Systems by Gopalsaggu199185% (27)
- Termo 3Document12 pagesTermo 3Leti HanajNo ratings yet
- T T DT T: Radiation Cos (Document23 pagesT T DT T: Radiation Cos (Chris AmorusoNo ratings yet
- Model Answers in Ordinary National Certificate Mathematics for EngineersFrom EverandModel Answers in Ordinary National Certificate Mathematics for EngineersNo ratings yet
- E24 PDFDocument8 pagesE24 PDFadil_farooq_6No ratings yet
- Multiple Reaction in PFRDocument13 pagesMultiple Reaction in PFRDilip KadavlaNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- E24Document8 pagesE24ROHITCHOURASIYANo ratings yet
- Rahmanda Luthfia - Tugas 1Document9 pagesRahmanda Luthfia - Tugas 1Rahmanda LuthfiaNo ratings yet
- Ecuaciones Diferenciales Parciales de Logan - Chapter 2 SolutionsDocument14 pagesEcuaciones Diferenciales Parciales de Logan - Chapter 2 SolutionsGibris Suárez MartínezNo ratings yet
- Rahmanda Luthfia - 1906322796 - Tugas 1Document10 pagesRahmanda Luthfia - 1906322796 - Tugas 1Rahmanda LuthfiaNo ratings yet
- PID Tuning Cohen Coon ExampleDocument8 pagesPID Tuning Cohen Coon ExamplegilangaspNo ratings yet
- Tester, Modell - Answers To Selected ProblemsDocument12 pagesTester, Modell - Answers To Selected ProblemsCoronel Mustang100% (1)
- Control Por Computador: November 12, 2013Document17 pagesControl Por Computador: November 12, 2013turbodilanNo ratings yet
- Solution Booklet EnglishDocument8 pagesSolution Booklet EnglishVidyakumari RethinavelNo ratings yet
- ENME503 Assignments Solutions 02Document10 pagesENME503 Assignments Solutions 02Seifeldin T. AbdelghanyNo ratings yet
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocument26 pagesWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsashutoshsinghjssNo ratings yet
- Solution Manual For Fluid Mechanics and Thermodynamics of Turbomachinery 7th Ed Sydney Lawrence Dixon Cesare Hall PDF FreeDocument10 pagesSolution Manual For Fluid Mechanics and Thermodynamics of Turbomachinery 7th Ed Sydney Lawrence Dixon Cesare Hall PDF FreePIYUSH PORWALNo ratings yet
- Computer Networks Exam SolutionDocument5 pagesComputer Networks Exam SolutionJBBARNo ratings yet
- Overleaf Keyboard ShortcutsDocument2 pagesOverleaf Keyboard ShortcutsJBBARNo ratings yet
- Multiple Choice Questions of Computer NetworkingDocument1 pageMultiple Choice Questions of Computer NetworkingJBBARNo ratings yet
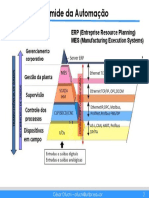
- Pirâmide Da Automação: ERP (Entreprise Resource Planning) MES (Manufacturing Execution Systems)Document1 pagePirâmide Da Automação: ERP (Entreprise Resource Planning) MES (Manufacturing Execution Systems)JBBARNo ratings yet
- Predictive Control: J.M.Maciejowski Cambridge University Engineering DepartmentDocument85 pagesPredictive Control: J.M.Maciejowski Cambridge University Engineering DepartmentSebastianNo ratings yet
- Pirâmide Da Automação: APC (Advanced Process Control)Document1 pagePirâmide Da Automação: APC (Advanced Process Control)JBBARNo ratings yet
- Matlab Script Com Between Python and MatlabDocument1 pageMatlab Script Com Between Python and MatlabJBBARNo ratings yet
- MPC For Tracking Periodic References PDFDocument6 pagesMPC For Tracking Periodic References PDFJBBARNo ratings yet
- TIA PORTAL Step7 Basic ManualDocument12 pagesTIA PORTAL Step7 Basic ManualBboyJeanko MarichalesNo ratings yet
- DH RepresentationDocument42 pagesDH RepresentationSaravanan SNo ratings yet
- How To Draw Anime FacesDocument68 pagesHow To Draw Anime FacesJBBARNo ratings yet
- TIA PORTAL Step7 Basic ManualDocument12 pagesTIA PORTAL Step7 Basic ManualBboyJeanko MarichalesNo ratings yet
- Introduction To FEMDocument63 pagesIntroduction To FEMJBBARNo ratings yet
- Comp3331 Solutionmidseason2010Document5 pagesComp3331 Solutionmidseason2010JBBARNo ratings yet
- Course Outline mtnr3200Document12 pagesCourse Outline mtnr3200JBBARNo ratings yet
- Course Outline mtnr3200Document12 pagesCourse Outline mtnr3200JBBARNo ratings yet