You might also like
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Understanding and Servicing Alarm SystemsFrom EverandUnderstanding and Servicing Alarm SystemsRating: 1 out of 5 stars1/5 (1)
- Shibaura Machine S NEW Model SCARA Robot THE400Document2 pagesShibaura Machine S NEW Model SCARA Robot THE400123qweNo ratings yet
- Manipulador NachiDocument28 pagesManipulador NachiAnonymous t7eZljNo ratings yet
- Easy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High ProductivityDocument2 pagesEasy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High Productivityanh thoNo ratings yet
- 01 Manual de Mantenimiento Del RobotDocument10 pages01 Manual de Mantenimiento Del RobotCarlos Eduardo Segura VillarrealNo ratings yet
- LR Mate 100 Ibm ManualDocument144 pagesLR Mate 100 Ibm ManualManuel GutierrezNo ratings yet
- Operating Instructions - KL4000 V10 enDocument231 pagesOperating Instructions - KL4000 V10 enXanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2008Document10 pagesNachi Robot Catalog 2008Xanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2008Document10 pagesNachi Robot Catalog 2008Xanti Zabala Da RosaNo ratings yet
- Skin Effect Current Tracing - Installation Manual PDFDocument27 pagesSkin Effect Current Tracing - Installation Manual PDFYoung-seok HwangNo ratings yet
- EAGLE Initial Configuration - Les01Document41 pagesEAGLE Initial Configuration - Les01fouad boutatNo ratings yet
- NRS EZ0302 StandardSpecificationDocument40 pagesNRS EZ0302 StandardSpecificationArifNo ratings yet
- SC400L-SC500 Standard SpecificationsDocument26 pagesSC400L-SC500 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- Nachi mz07 SpecificationDocument26 pagesNachi mz07 Specificationkhophimhd100% (1)
- 1-Axis Servo Possition Maintenance ManualDocument126 pages1-Axis Servo Possition Maintenance Manualto0984903132No ratings yet
- SCARA Robot THL SeriesDocument2 pagesSCARA Robot THL Series123qweNo ratings yet
- TX200 6 Axis Product Data Sheet ENDocument3 pagesTX200 6 Axis Product Data Sheet ENVăn Hiếu NguyễnNo ratings yet
- KR 6 R500 Z200: Workspace GraphicDocument1 pageKR 6 R500 Z200: Workspace GraphicAkechai OunsiriNo ratings yet
- THL1200 enDocument2 pagesTHL1200 enjet.heNo ratings yet
- VS-6556 and VS 6577 Technical Data SheetDocument3 pagesVS-6556 and VS 6577 Technical Data SheetKien Nguyen TrungNo ratings yet
- Dyadic Systems CatalogDocument14 pagesDyadic Systems CatalogJuan Francisco Sanchez MassadiNo ratings yet
- ACCOLIFT CLH Electric Chain Hoists Installation Operation Maintenance and Parts ManualDocument98 pagesACCOLIFT CLH Electric Chain Hoists Installation Operation Maintenance and Parts ManualMiguel Alfonso Ruiz Mendez100% (1)
- ES12 BrochureDocument2 pagesES12 BrochureXanti Zabala Da RosaNo ratings yet
- Standard Specifications SRA-01-FD11 SRA-01A-FD11 SRA-L-01-FD11 SRA-EL-01-FD11Document42 pagesStandard Specifications SRA-01-FD11 SRA-01A-FD11 SRA-L-01-FD11 SRA-EL-01-FD11Gonzalo CánepaNo ratings yet
- Stepping Motors 3 PhasesDocument12 pagesStepping Motors 3 PhasesTamas RaduNo ratings yet
- Levi Hobby Tech LTD: Specification of Product User ManualDocument2 pagesLevi Hobby Tech LTD: Specification of Product User ManualAadityaChandramouliNo ratings yet
- EPV16Document100 pagesEPV16hrmlynNo ratings yet
- Shibaura (New) Scara The 600Document4 pagesShibaura (New) Scara The 600Pame MelussiNo ratings yet
- ISO 1000 Torque Loading Rig Operators HandbookDocument8 pagesISO 1000 Torque Loading Rig Operators Handbookjon1224No ratings yet
- Yaestj: Antenna Rotator Model G-450XLDocument12 pagesYaestj: Antenna Rotator Model G-450XLMar CabNo ratings yet
- ☆ SJ-inclined-screens-technical-specification-山特维克Document8 pages☆ SJ-inclined-screens-technical-specification-山特维克AShuang qinNo ratings yet
- Parallel Robot Quattro 800H Achieves High Speed PrecisionDocument2 pagesParallel Robot Quattro 800H Achieves High Speed PrecisionjorgemantillaNo ratings yet
- Standard specifications for RS080N-B industrial robot arm and E02 controllerDocument5 pagesStandard specifications for RS080N-B industrial robot arm and E02 controllerAdrielSilvaNo ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogJuan Francisco Sanchez MassadiNo ratings yet
- HX500GII-on MK5G2PK01E 40Document25 pagesHX500GII-on MK5G2PK01E 40al221511243No ratings yet
- AB-PR Part-Turn Gear SeriesDocument6 pagesAB-PR Part-Turn Gear SeriesSrinivasanArumugamvenkatachalamNo ratings yet
- Datasheet Abb Irb 910sc ScaraDocument4 pagesDatasheet Abb Irb 910sc ScaraLuis Valencia EscarcenaNo ratings yet
- Annexure - 1: Page 1 of 9Document9 pagesAnnexure - 1: Page 1 of 9Haresh RaisinghaniNo ratings yet
- C InstalDocument170 pagesC InstalklemencicvinkoNo ratings yet
- 2-Axes Servo Possition Maintenance ManualDocument106 pages2-Axes Servo Possition Maintenance Manualto0984903132No ratings yet
- Mesin Robot GreasingDocument2 pagesMesin Robot Greasingadventius S.SNo ratings yet
- Digital Servo HD-7150MG V1 1/3: Product Name Model NoDocument3 pagesDigital Servo HD-7150MG V1 1/3: Product Name Model NoRifki ReinaldoNo ratings yet
- MELFA RH-3CH SCARA Robot Brochure PDFDocument2 pagesMELFA RH-3CH SCARA Robot Brochure PDFVirendra ZopeNo ratings yet
- HM-G Series Horizontal Articulated RobotDocument8 pagesHM-G Series Horizontal Articulated RobotAchinNo ratings yet
- Flat Ribbon Fibre Optic Patch CableDocument2 pagesFlat Ribbon Fibre Optic Patch CableAmir SalahNo ratings yet
- Sauter Head Type Tool TurretDocument27 pagesSauter Head Type Tool TurretmaddyaugNo ratings yet
- 01 2023 Collective Data Sheet-1Document2 pages01 2023 Collective Data Sheet-1Lasitha RanaweeraNo ratings yet
- PC130 7 PDFDocument220 pagesPC130 7 PDFNoe Phic KhalNo ratings yet
- DPL Series: 2-Jaw Precision Parallel Grippers - Features and Benefits - How To OrderDocument8 pagesDPL Series: 2-Jaw Precision Parallel Grippers - Features and Benefits - How To OrderROHIT JAGTAPNo ratings yet
- C Controller Ops and Programming PDFDocument564 pagesC Controller Ops and Programming PDFdilipNo ratings yet
- Proven Reliability and Performance, Plus Greater Versatility and Operating EaseDocument2 pagesProven Reliability and Performance, Plus Greater Versatility and Operating EaseKhoi NguyenNo ratings yet
- DFPD - Double Acting With DimensionDocument7 pagesDFPD - Double Acting With DimensionSadamNo ratings yet
- Hibon - SN Ingersoll Rand BlowerDocument7 pagesHibon - SN Ingersoll Rand BlowermarquezsiemNo ratings yet
- (Solo 5-7C) SANDVIKDocument4 pages(Solo 5-7C) SANDVIKCesar Gabriel Valdez SotoNo ratings yet
- 6-Axis Type Robot Welding MachineDocument5 pages6-Axis Type Robot Welding MachineVictor PATIÑONo ratings yet
- WRB Danelli Mittal KK-24160 PDFDocument45 pagesWRB Danelli Mittal KK-24160 PDFanon_647217551No ratings yet
- CCC Made Easy China CertificationDocument28 pagesCCC Made Easy China CertificationShung Tak ChanNo ratings yet
- Token Ring Technology ReportFrom EverandToken Ring Technology ReportNo ratings yet
- RobotStudio Operation Manual PDFDocument298 pagesRobotStudio Operation Manual PDFEmanuelNo ratings yet
- Program Editor User ManualDocument14 pagesProgram Editor User ManualXanti Zabala Da RosaNo ratings yet
- E Series Installation and Connection ManualDocument114 pagesE Series Installation and Connection ManualXanti Zabala Da RosaNo ratings yet
- RobotStudio Operation Manual PDFDocument298 pagesRobotStudio Operation Manual PDFEmanuelNo ratings yet
- RobotWare 6 DatasheetDocument4 pagesRobotWare 6 DatasheetXanti Zabala Da RosaNo ratings yet
- Operating Manual - RobotStudio 2019.2 Rev.Z PDFDocument290 pagesOperating Manual - RobotStudio 2019.2 Rev.Z PDFXanti Zabala Da RosaNo ratings yet
- Release Notes RobotStudio 2019-5 PDFDocument44 pagesRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaNo ratings yet
- Product GuidanceDocument1 pageProduct GuidanceXanti Zabala Da RosaNo ratings yet
- DENSO Manual CastellanoDocument692 pagesDENSO Manual CastellanoJulianna LizcanoNo ratings yet
- Denso Robotic V - BegDocument168 pagesDenso Robotic V - BegSam eagle goodNo ratings yet
- E Series Installation and Connection ManualDocument114 pagesE Series Installation and Connection ManualXanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2012Document20 pagesNachi Robot Catalog 2012Xanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2017Document36 pagesNachi Robot Catalog 2017Xanti Zabala Da RosaNo ratings yet
- Cleanroom CR7 E 06.2015Document2 pagesCleanroom CR7 E 06.2015Xanti Zabala Da RosaNo ratings yet
- Servo Weld Guns - CXR TYPE: 2M MTBF 100% BodyshopDocument2 pagesServo Weld Guns - CXR TYPE: 2M MTBF 100% BodyshopEddie ScarpaNo ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- 7-axis flexible robot arm with IP67 ratingDocument2 pages7-axis flexible robot arm with IP67 ratingXanti Zabala Da RosaNo ratings yet
- LP 01 AX20 Standard SpecificationsDocument20 pagesLP 01 AX20 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDocument2 pages500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNo ratings yet
- SRA166 210 BrochureDocument2 pagesSRA166 210 BrochureXanti Zabala Da RosaNo ratings yet
- LP 01 AX20 Standard SpecificationsDocument20 pagesLP 01 AX20 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- 7-axis flexible robot arm with IP67 ratingDocument2 pages7-axis flexible robot arm with IP67 ratingXanti Zabala Da RosaNo ratings yet
- 00f5semka01 PDFDocument28 pages00f5semka01 PDFKrittaphak HacheyramNo ratings yet
- PCS 2000 - Operators ManualDocument22 pagesPCS 2000 - Operators Manualadrenalina054100% (2)
- Page Intentionally Left Blank: Cl-604 Aircraft Illustrated Parts CatalogDocument4 pagesPage Intentionally Left Blank: Cl-604 Aircraft Illustrated Parts CatalogEmmanuel OnwukaNo ratings yet
- Mls 2300 AcdcDocument26 pagesMls 2300 AcdcCesar ObesoNo ratings yet
- 9200 m1f 0380 00 Issue 02Document144 pages9200 m1f 0380 00 Issue 02Philipp GaussNo ratings yet
- Accutech TM10 Datasheet LetterDocument5 pagesAccutech TM10 Datasheet LetterDieguin SuárezNo ratings yet
- Reference Manual Series 2Document42 pagesReference Manual Series 2Viong Danon100% (1)
- BTL5-P/I/K/L/M - M - A/B/Z-S32/KA - Micropulse Linear Transducer - Rod StyleDocument8 pagesBTL5-P/I/K/L/M - M - A/B/Z-S32/KA - Micropulse Linear Transducer - Rod StyleGerardo Navarro CastilloNo ratings yet
- CLV63x ManualDocument120 pagesCLV63x ManualCarlos Castillo AguirreNo ratings yet
- Dolby Cinema Processor CP950 Manual Issue 6Document131 pagesDolby Cinema Processor CP950 Manual Issue 6syabandi masnurNo ratings yet
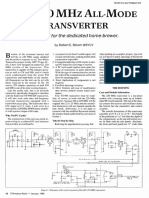
- 220 MHZ All-Mode Transverter PDFDocument6 pages220 MHZ All-Mode Transverter PDFvu2ttp0% (1)
- BOQ FinancialDocument26 pagesBOQ FinancialRajesh ChowhanNo ratings yet
- HDC SD1 PDFDocument77 pagesHDC SD1 PDFОлександр ВівчарчукNo ratings yet
- Panasonic SC Akx50 Manual de UsuarioDocument28 pagesPanasonic SC Akx50 Manual de UsuarioEmis GonzalezNo ratings yet
- Manual SPM 200Document39 pagesManual SPM 200Francisco Javier Vera TorresNo ratings yet
- Xerox 6204Document176 pagesXerox 6204BzsNo ratings yet
- SMC VT307 Solenoid Valve Direct Operated Poppet TypeDocument11 pagesSMC VT307 Solenoid Valve Direct Operated Poppet TypeCarlos Andrés CuelloNo ratings yet
- Cisco DCM D9900 System GuideDocument172 pagesCisco DCM D9900 System GuideKanthi Lal BaidyaNo ratings yet
- Attachment 1Document13 pagesAttachment 1Gourish BhandariNo ratings yet
- Gemini - Amplifier XPM-600, 900, 1200 - Service ManualDocument24 pagesGemini - Amplifier XPM-600, 900, 1200 - Service Manualapi-371104550% (2)
- LUNA Manual Eng Rev.201903Document44 pagesLUNA Manual Eng Rev.201903SUPPANAT CHAISAWATNo ratings yet
- ServiceManuals - LG - Washing - WD1227RD - WD-1227RD Service Manual PDFDocument44 pagesServiceManuals - LG - Washing - WD1227RD - WD-1227RD Service Manual PDFPTcmNo ratings yet
- GE Gas Turbine DocumentDocument90 pagesGE Gas Turbine DocumentSUKHDEV SINGHNo ratings yet
- Eng CS Epp-2095-En 1304 Epp 2095 enDocument4 pagesEng CS Epp-2095-En 1304 Epp 2095 enSang SekNo ratings yet
- Samson S Patch PlusDocument1 pageSamson S Patch PlusGREMAUDNo ratings yet
- Philips Chasis l7Document39 pagesPhilips Chasis l7videosonNo ratings yet
- Esm 4900Document69 pagesEsm 4900BenbrikaAhmedNo ratings yet
- Tcp50ut50 PDFDocument97 pagesTcp50ut50 PDFDavi CaldasNo ratings yet