You might also like
- FAB30303 Mobile Robotics - Assignment - July 2020 PDFDocument2 pagesFAB30303 Mobile Robotics - Assignment - July 2020 PDFpaishkepengNo ratings yet
- Modeling of A Three Wheeled Omnidirectional Robot Including Friction ModelsDocument6 pagesModeling of A Three Wheeled Omnidirectional Robot Including Friction ModelsAli EbNo ratings yet
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterNo ratings yet
- Dynamic Optimization and Building of A Parallel Delta-Type RobotDocument6 pagesDynamic Optimization and Building of A Parallel Delta-Type RobotANDRES RODRIGO VIDARTE RUIZNo ratings yet
- Mub04 Jour Pra PDFDocument21 pagesMub04 Jour Pra PDFakashpatro25No ratings yet
- Inverse Kinematics Analysis For Manipulator Robot With Wrist Offset Based On The Closed-Form AlgorithmDocument9 pagesInverse Kinematics Analysis For Manipulator Robot With Wrist Offset Based On The Closed-Form AlgorithmAI Coordinator - CSC JournalsNo ratings yet
- The Full-Decomposition of Sequential Machines With The Separate Realization of The Next-State and Output FunctionsDocument23 pagesThe Full-Decomposition of Sequential Machines With The Separate Realization of The Next-State and Output Functionsblesson27No ratings yet
- Segregation IROS2015Document6 pagesSegregation IROS2015Anonymous TNIoFL77jNo ratings yet
- Exercises of Discrete Event Systems - #1Document6 pagesExercises of Discrete Event Systems - #1ivanortiz24No ratings yet
- What Is A Parallel RobotDocument46 pagesWhat Is A Parallel Robotminh_bk0101No ratings yet
- Robust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDocument6 pagesRobust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDandro-LinkNo ratings yet
- Given:: M M RD Max SetDocument2 pagesGiven:: M M RD Max Setjainam jainNo ratings yet
- Robust Control For A Delta RobotDocument6 pagesRobust Control For A Delta Robotjuanpereza21No ratings yet
- Maze Solving Algorithms For Micro MouseDocument8 pagesMaze Solving Algorithms For Micro MouseJames BrownNo ratings yet
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocument6 pagesThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsmiguelrlzNo ratings yet
- 06 Roma06Document14 pages06 Roma06Sankalp BhatiyaNo ratings yet
- Airo V1i 20Document19 pagesAiro V1i 20Khoa NguyễnNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- Scheduling and Sequencing in Four Machines Robotic Cell - 2013 - Ain Shams EngDocument10 pagesScheduling and Sequencing in Four Machines Robotic Cell - 2013 - Ain Shams EngOsama MohammdNo ratings yet
- Development and Control Experiment of The Trident Snake RobotDocument8 pagesDevelopment and Control Experiment of The Trident Snake RobotbanedogNo ratings yet
- Chapter1-Introduction To Robotics - AUNDocument32 pagesChapter1-Introduction To Robotics - AUNMeo MeoNo ratings yet
- Design and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariDocument6 pagesDesign and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariPutri metapowerNo ratings yet
- The Mathematical Model and Direct Kinematics Solution Analysis of Delta Parallel RobotDocument5 pagesThe Mathematical Model and Direct Kinematics Solution Analysis of Delta Parallel Robotfilipe o toscoNo ratings yet
- Robotics Question BankDocument8 pagesRobotics Question BankmsckoneruNo ratings yet
- Literature Review UpdateDocument14 pagesLiterature Review Updatetlili mohamed aliNo ratings yet
- Sms Unit-Wise Qs (Sjbit)Document14 pagesSms Unit-Wise Qs (Sjbit)Rudresh CMNo ratings yet
- Experimental Comparison of Extended Kalman and Particle Filter in Mobile Robotic LocalizationDocument6 pagesExperimental Comparison of Extended Kalman and Particle Filter in Mobile Robotic LocalizationDong HoangNo ratings yet
- M and S QuestionsDocument14 pagesM and S QuestionsswjaffryNo ratings yet
- Analysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoDocument6 pagesAnalysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoVignesh RamakrishnanNo ratings yet
- PDFDocument24 pagesPDFOlga Joy Labajo GerastaNo ratings yet
- A Dual-Model Fault Detection Approach With Application To Actuators of Robot ManipulatorsDocument6 pagesA Dual-Model Fault Detection Approach With Application To Actuators of Robot ManipulatorsmkannanofficialNo ratings yet
- Cell Formation Considering Sequence of Operations and WorkloadDocument10 pagesCell Formation Considering Sequence of Operations and Workloadshailesh_tiwari_mechNo ratings yet
- Mechanical Systems: Serial ManipulatorDocument13 pagesMechanical Systems: Serial ManipulatorCristina González GarcíaNo ratings yet
- (12249718 - Annals of West University of Timisoara - Physics) Quarter Car Suspension System With One Degree of Freedom Simulated Using SimulinkDocument6 pages(12249718 - Annals of West University of Timisoara - Physics) Quarter Car Suspension System With One Degree of Freedom Simulated Using SimulinkCUT nchimwazaNo ratings yet
- Mech3460 Robotics 11 12Document100 pagesMech3460 Robotics 11 12Saied Aly SalamahNo ratings yet
- Models FDocument8 pagesModels FValery SalauyouNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RNo ratings yet
- Modular Robots Carrying LoadDocument7 pagesModular Robots Carrying LoadDHARMA SAI TEJANo ratings yet
- RobotDocument17 pagesRobotpdhananjaya007No ratings yet
- A Simulink Environment For Simulation and Control of Flexible Manipulator SystemsDocument6 pagesA Simulink Environment For Simulation and Control of Flexible Manipulator SystemsselvamNo ratings yet
- Space Robot: Miss. Shweta Kale, Miss. Gayatri Patole, Miss. Mohoni MohurleDocument8 pagesSpace Robot: Miss. Shweta Kale, Miss. Gayatri Patole, Miss. Mohoni MohurleInternational Journal of Engineering Inventions (IJEI)No ratings yet
- 17 TrangDocument16 pages17 TrangPhong ĐặngNo ratings yet
- Autonomous Decentralized Control For Formation Multiple Mobile-Robots Considering Ability of RobotDocument6 pagesAutonomous Decentralized Control For Formation Multiple Mobile-Robots Considering Ability of RobotZeeshan ShamsiNo ratings yet
- An Improved Simulated Annealing For Facility Layout Problems in Cellular Manufacturing SystemsDocument11 pagesAn Improved Simulated Annealing For Facility Layout Problems in Cellular Manufacturing SystemsAnonymous PsEz5kGVaeNo ratings yet
- FMS LayoutDocument7 pagesFMS LayoutHarish ShanmuganathanNo ratings yet
- Mobile Robot RefDocument25 pagesMobile Robot Refchoc_ngoayNo ratings yet
- Laboratory For Information and Decision Systems, M.I.T., Cambridge, MA 02139, USADocument20 pagesLaboratory For Information and Decision Systems, M.I.T., Cambridge, MA 02139, USAramesh nutakkiNo ratings yet
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocument9 pagesThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsBignaturalNo ratings yet
- Minimum-Time Trajectory Planning and Control of A Pick-and-Place Five-Bar Parallel RobotDocument10 pagesMinimum-Time Trajectory Planning and Control of A Pick-and-Place Five-Bar Parallel Robotibrahimgulay15No ratings yet
- Chap 3 Manufacturing ProcessDocument117 pagesChap 3 Manufacturing Processtejasbamane64No ratings yet
- A New Acting Solution of A Double Scara Robot: Iosif Tempea, Marin Neacşa, Adriana LivadariuDocument6 pagesA New Acting Solution of A Double Scara Robot: Iosif Tempea, Marin Neacşa, Adriana Livadariusalberry14No ratings yet
- Paper6253 2632Document11 pagesPaper6253 2632Tho Ho DucNo ratings yet
- Kinematic Modeling of Quadruped RobotDocument6 pagesKinematic Modeling of Quadruped Robotnilesh_092No ratings yet
- Forward and Inverse Kinematics of A Delta Robot With CGA5Document13 pagesForward and Inverse Kinematics of A Delta Robot With CGA5Chí Long NguyễnNo ratings yet
- Lecture Robotics1Document33 pagesLecture Robotics1N MNo ratings yet
- Chapter 1Document4 pagesChapter 1inesboumaiza293No ratings yet
- Mechanical Structural Analysis AND Design Optimization: OF Industrial RobotsDocument29 pagesMechanical Structural Analysis AND Design Optimization: OF Industrial RobotsAhsan AmjadNo ratings yet
- Discrete Event Systems in Dioid Algebra and Conventional AlgebraFrom EverandDiscrete Event Systems in Dioid Algebra and Conventional AlgebraNo ratings yet
- Abhishek GDocument1 pageAbhishek GSum Sumne SumanthNo ratings yet
- 3 PDFDocument1 page3 PDFSum Sumne SumanthNo ratings yet
- 1 PDFDocument1 page1 PDFSum Sumne SumanthNo ratings yet
- Final PDFDocument8 pagesFinal PDFSum Sumne SumanthNo ratings yet
- Final PDFDocument8 pagesFinal PDFSum Sumne SumanthNo ratings yet
- To Whom It May ConcernDocument1 pageTo Whom It May ConcernSum Sumne SumanthNo ratings yet
- Relieving Letter & Service CertificateDocument1 pageRelieving Letter & Service CertificateSum Sumne SumanthNo ratings yet
- Virtual Manufacturing: ColloquiumDocument37 pagesVirtual Manufacturing: ColloquiumSum Sumne SumanthNo ratings yet
- T E L T D: HermaxDocument1 pageT E L T D: HermaxSum Sumne SumanthNo ratings yet
- 1 PDFDocument1 page1 PDFSum Sumne SumanthNo ratings yet
- Reverse Engg East PointDocument19 pagesReverse Engg East PointSum Sumne SumanthNo ratings yet
- CATIA Full Book 2 Print - 2Document147 pagesCATIA Full Book 2 Print - 2Sum Sumne SumanthNo ratings yet
- Degree University/ Board Institution Year of Passing Percen - TageDocument2 pagesDegree University/ Board Institution Year of Passing Percen - TageSum Sumne SumanthNo ratings yet
- Ashoka PolytechnicDocument1 pageAshoka PolytechnicSum Sumne SumanthNo ratings yet
- HP Training Diagnostics 75 Usage and AdministrationDocument2 pagesHP Training Diagnostics 75 Usage and AdministrationraviskskskNo ratings yet
- Assignment Brief HNHM301 The Contemporary Hospitality IndustryDocument6 pagesAssignment Brief HNHM301 The Contemporary Hospitality IndustryTanjum Tisha100% (1)
- LTE Radio Network Design Guideline (FDD)Document33 pagesLTE Radio Network Design Guideline (FDD)Tri Frida NingrumNo ratings yet
- Jsa - Cable TerminationDocument4 pagesJsa - Cable TerminationSantos Rex73% (15)
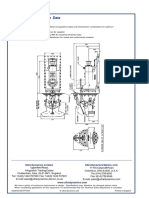
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- QUIZ - PFRS 1 - FIRST TIME ADOPTION OF PFRSsDocument2 pagesQUIZ - PFRS 1 - FIRST TIME ADOPTION OF PFRSsGonzalo Jr. Ruales83% (6)
- Zintek® 300 HP + Techseal® Glossy Black SLDocument9 pagesZintek® 300 HP + Techseal® Glossy Black SLSyedMazharAliShahNo ratings yet
- Crude Palm OilDocument4 pagesCrude Palm OilpalmoilanalyticsNo ratings yet
- National Knowledge Commision and Its Implication in Higher EducationDocument73 pagesNational Knowledge Commision and Its Implication in Higher Educationabhi301280100% (1)
- Presentation - 02 Reliability in Computer SystemsDocument24 pagesPresentation - 02 Reliability in Computer Systemsvictorwu.ukNo ratings yet
- Lust V Animal Logic MSJ OppositionDocument34 pagesLust V Animal Logic MSJ OppositionTHROnlineNo ratings yet
- U90 Ladder Tutorial PDFDocument72 pagesU90 Ladder Tutorial PDFMarlon CalixNo ratings yet
- BS en 12285-1-2003 (2006)Document162 pagesBS en 12285-1-2003 (2006)dahzahNo ratings yet
- Technical Writing PDFDocument129 pagesTechnical Writing PDFKundan Kumar100% (1)
- Raul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloDocument4 pagesRaul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloRam Migue SaintNo ratings yet
- Unit 4 Pharmacognsosy 2 - 5th SemDocument16 pagesUnit 4 Pharmacognsosy 2 - 5th SemJagadeeshkeerthi KeerthiNo ratings yet
- SCADA Generic Risk Management FrameworkDocument49 pagesSCADA Generic Risk Management FrameworkAnak PohonNo ratings yet
- Cylinder Clamp For N2 Cylinder 84L and FM-200 Cylinder 82.5LDocument1 pageCylinder Clamp For N2 Cylinder 84L and FM-200 Cylinder 82.5LNguyễn Minh ThiệuNo ratings yet
- Arti ResearchDocument10 pagesArti Researcharti nongbetNo ratings yet
- Oil and Gas Reloaded: Offshore ArgentinaDocument9 pagesOil and Gas Reloaded: Offshore ArgentinaMuhammad Fahmi AnbNo ratings yet
- A Flight Plan in 10 StepsDocument4 pagesA Flight Plan in 10 StepsThar LattNo ratings yet
- Best of SEO#1 SEO Training & Content Marketing Course 2022Document2 pagesBest of SEO#1 SEO Training & Content Marketing Course 2022Oscar MascarenoNo ratings yet
- DTR For ReadingDocument2 pagesDTR For ReadingTimosa TeyobNo ratings yet
- Mas MockboardDocument7 pagesMas MockboardMaurene DinglasanNo ratings yet
- WabimalunoxowevefoDocument3 pagesWabimalunoxowevefoChitmin KhantNo ratings yet
- Spice Board BBLDocument24 pagesSpice Board BBLvenkatpficoNo ratings yet
- CIVPRO - Case Compilation No. 2Document95 pagesCIVPRO - Case Compilation No. 2Darla GreyNo ratings yet
- Opposition To Motion For Judgment On PleadingsDocument31 pagesOpposition To Motion For Judgment On PleadingsMark Jaffe100% (1)
- Booklet Course 8 Chapter 3Document19 pagesBooklet Course 8 Chapter 3Joaquin CarrilloNo ratings yet
- Ge Washing Machine ManualDocument52 pagesGe Washing Machine Manuallillith1723No ratings yet