You might also like
- Revista Telecomunicaciones 2Document38 pagesRevista Telecomunicaciones 2Mylo AlfonsoNo ratings yet
- Unidad1y2 SISTEMAS DINAMICOSDocument69 pagesUnidad1y2 SISTEMAS DINAMICOSLismar CarolinaNo ratings yet
- Universidad Del CaucaDocument119 pagesUniversidad Del CaucaMylo AlfonsoNo ratings yet
- Mejora de La Eficiencia Espectral en Redes DWDM A 40GBPS A Través de Los Formatos de Modulación Avanzados DPSK y DQPSKDocument182 pagesMejora de La Eficiencia Espectral en Redes DWDM A 40GBPS A Través de Los Formatos de Modulación Avanzados DPSK y DQPSKMylo AlfonsoNo ratings yet
- 3.2. MANUAL RITEL FINAL-páginas-11-22 PDFDocument12 pages3.2. MANUAL RITEL FINAL-páginas-11-22 PDFMylo AlfonsoNo ratings yet
- PFC 456 LopezDocument228 pagesPFC 456 LopezMylo AlfonsoNo ratings yet
- Informe RuidoDocument5 pagesInforme RuidoMylo AlfonsoNo ratings yet
- 1 Plan Nutricional 1300 KcalDocument3 pages1 Plan Nutricional 1300 KcalMylo AlfonsoNo ratings yet
- Ruido - Practica 4Document5 pagesRuido - Practica 4Mylo AlfonsoNo ratings yet
- José María Hernando Rábanos-Sistemas de Telecomunicación - Transmisión Por Linea y Redes.Document441 pagesJosé María Hernando Rábanos-Sistemas de Telecomunicación - Transmisión Por Linea y Redes.Daniel Brañez100% (3)
- Informe RadiacionDocument5 pagesInforme RadiacionMylo AlfonsoNo ratings yet
- 3.2. MANUAL RITEL FINAL-páginas-11-22 PDFDocument12 pages3.2. MANUAL RITEL FINAL-páginas-11-22 PDFMylo AlfonsoNo ratings yet
- Segundo Parcial - Cristian EspañaDocument4 pagesSegundo Parcial - Cristian EspañaMylo AlfonsoNo ratings yet
- Universidad Politécnica de Madrid: Autor: Jonathan Mora Cuevas Ingeniero de TelecomunicaciónDocument262 pagesUniversidad Politécnica de Madrid: Autor: Jonathan Mora Cuevas Ingeniero de TelecomunicaciónDiego Matias OrregoNo ratings yet
- Variables de Estado DiscretaDocument11 pagesVariables de Estado Discretajimena3330No ratings yet
- Documento Clase - Teoria de Telecomunicacion I VMDocument91 pagesDocumento Clase - Teoria de Telecomunicacion I VMDeisy Francely100% (1)
- Capitulo1TC 2007Document14 pagesCapitulo1TC 2007Mylo AlfonsoNo ratings yet
- Tecno 4 BessemerDocument29 pagesTecno 4 BessemerelectronsxxiNo ratings yet
- 2 Señales Periodicas y Series de FourierDocument21 pages2 Señales Periodicas y Series de FourierMylo AlfonsoNo ratings yet
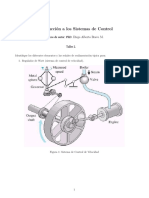
- Taller 2. Introducción A Los Sistemas de ControlDocument3 pagesTaller 2. Introducción A Los Sistemas de ControlMylo AlfonsoNo ratings yet
- 2 Señales Periodicas y Series de FourierDocument21 pages2 Señales Periodicas y Series de FourierMylo AlfonsoNo ratings yet
- Folleto Positiva PDFDocument2 pagesFolleto Positiva PDFCamilaNo ratings yet
- Cotizacion StockDocument1 pageCotizacion StockMylo AlfonsoNo ratings yet
- Folleto Positiva PDFDocument2 pagesFolleto Positiva PDFCamilaNo ratings yet
- Guia Informe 2 LabIIISistelDocument18 pagesGuia Informe 2 LabIIISistelmanfred clausNo ratings yet
- Intro Redes P5 OSI II 2019 PDFDocument58 pagesIntro Redes P5 OSI II 2019 PDFMylo AlfonsoNo ratings yet
- Taller Conceptual Nivel Físico e InterfacesDocument9 pagesTaller Conceptual Nivel Físico e InterfacesMylo AlfonsoNo ratings yet
- TCEF Transistor BipolarDocument22 pagesTCEF Transistor BipolarFranklinNo ratings yet
- Informe Conexion CascodeDocument5 pagesInforme Conexion CascodeJulioHuangaRNo ratings yet
- 7 TransistoresDocument25 pages7 TransistoresRogelio Alberto Hernandez PerezNo ratings yet
- PHP y MySQLDocument81 pagesPHP y MySQLAnyer AndaraNo ratings yet
- Dia Neocenter - Taller - XorcomDocument60 pagesDia Neocenter - Taller - XorcomChinno PaillkiNo ratings yet
- Aplicaciones Contables InformáticasDocument64 pagesAplicaciones Contables Informáticasfranzul0077564No ratings yet
- Conexión 701Server 701Client 40Document5 pagesConexión 701Server 701Client 40jvgonzalezramonNo ratings yet
- Proyecto Clarity Loma DanielaDocument5 pagesProyecto Clarity Loma DanielaDaniela LomaNo ratings yet
- Clase # 1.2 - ESTRUCTURAS DE CONTRODocument13 pagesClase # 1.2 - ESTRUCTURAS DE CONTROBrianNo ratings yet
- CNT Auditoría Sistemas InformáticosDocument32 pagesCNT Auditoría Sistemas InformáticosJosé Javier Benavides Cevallos100% (1)
- Logo Actividades BasicasDocument61 pagesLogo Actividades BasicasPaul Hershcules HershNo ratings yet
- 3.1.1.5 Lab - Create and Store Strong Passwords - ILMDocument4 pages3.1.1.5 Lab - Create and Store Strong Passwords - ILMalex0% (1)
- Trabajo Orden y Desplazamiento CarlosDocument26 pagesTrabajo Orden y Desplazamiento CarlosCarlos Luis100% (1)
- Caso Semana 7Document2 pagesCaso Semana 7Jessica Paola Mazariegos GarciaNo ratings yet
- Tipos de AplicacionesDocument3 pagesTipos de Aplicacionesdeiiv10No ratings yet
- Tutorial Básico de SigilDocument12 pagesTutorial Básico de Sigilvolvoreta_No ratings yet
- La CriptografíaDocument4 pagesLa CriptografíaFabiola GumucioNo ratings yet
- Sistemas Operativos TeDocument17 pagesSistemas Operativos TeESTEFANIA MISHEL TAPIA ESPINOSANo ratings yet
- Tarea 2 DevSoftwareLibre-JonasRomanEspaillat-100035092Document7 pagesTarea 2 DevSoftwareLibre-JonasRomanEspaillat-100035092Jonas RomanNo ratings yet
- Proforma10 Mant Ups Seguridad AacdDocument3 pagesProforma10 Mant Ups Seguridad AacdDAVID NEFTALI SULCA GARCIANo ratings yet
- Servicios Academicos InternetDocument58 pagesServicios Academicos InternetFelipe DoradoNo ratings yet
- GUIA 12 EXCEL Validacion de Datos y Tablas DinamicasDocument11 pagesGUIA 12 EXCEL Validacion de Datos y Tablas Dinamicasjagude100% (2)
- 658.11 G144Document79 pages658.11 G144antonio_ruaNo ratings yet
- Importancia de La Inge en SoftwareDocument5 pagesImportancia de La Inge en SoftwareFreichaNo ratings yet
- SO 2022 2023 Práctica1Document31 pagesSO 2022 2023 Práctica1Andres SenabreNo ratings yet
- Reglamento de La Sala de ComputacionDocument3 pagesReglamento de La Sala de Computacioncolegiovalle80% (5)
- 04 Cap 4 5 6 7 PDFDocument154 pages04 Cap 4 5 6 7 PDFBABONo ratings yet
- Preguntas Del Caso de EstudioDocument2 pagesPreguntas Del Caso de EstudioLindeth OrdoñezNo ratings yet
- Librería STDIODocument4 pagesLibrería STDIOGarcia Vazquez Diego SebastianNo ratings yet
- Revision - Site ATP-CND01-CANDELARIA-Vr.5Document28 pagesRevision - Site ATP-CND01-CANDELARIA-Vr.5walter.diaz.molinaNo ratings yet
- Usando La Entrada AnalogaDocument6 pagesUsando La Entrada AnalogaLuis Luchini FernandezNo ratings yet
- Registro ComisaríasDocument25 pagesRegistro ComisaríasEduard CardenasNo ratings yet
- Organizar y almacenar datos en bases de datos relacionales y no relacionalesDocument8 pagesOrganizar y almacenar datos en bases de datos relacionales y no relacionalesGuillermo HuamanNo ratings yet