You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Review Paper On Bfo and Pso Based Movie Recommendation System - J4rv4i1015Document6 pagesA Review Paper On Bfo and Pso Based Movie Recommendation System - J4rv4i1015Journal 4 ResearchNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Experimental Verification and Validation of Stress Distribution of Composite Beam With Metal Beam With Different Support Conditions - J4RV4I2002Document2 pagesExperimental Verification and Validation of Stress Distribution of Composite Beam With Metal Beam With Different Support Conditions - J4RV4I2002Journal 4 ResearchNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Image Binarization For The Uses of Preprocessing To Detect Brain Abnormality Identification - J4RV4I2001Document4 pagesImage Binarization For The Uses of Preprocessing To Detect Brain Abnormality Identification - J4RV4I2001Journal 4 ResearchNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Design and Analysis of Hydraulic Actuator in A Typical Aerospace Vehicle - J4RV4I2003Document10 pagesDesign and Analysis of Hydraulic Actuator in A Typical Aerospace Vehicle - J4RV4I2003Journal 4 ResearchNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Movie Recommendation System - J4RV4I1016Document8 pagesMovie Recommendation System - J4RV4I1016Journal 4 ResearchNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Review On Design of Public Transportation System in Chandrapur City - J4rv4i1007Document7 pagesA Review On Design of Public Transportation System in Chandrapur City - J4rv4i1007Journal 4 ResearchNo ratings yet
- Movie Recommendation System - J4RV4I1016Document8 pagesMovie Recommendation System - J4RV4I1016Journal 4 ResearchNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- IoT Based Digital Agriculture Monitoring System and Their Impact On Optimal Utilization of Resources - J4RV4I1017Document6 pagesIoT Based Digital Agriculture Monitoring System and Their Impact On Optimal Utilization of Resources - J4RV4I1017Journal 4 ResearchNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hci Based Application For Playing Computer Games - J4rv4i1014Document5 pagesHci Based Application For Playing Computer Games - J4rv4i1014Journal 4 ResearchNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Review Study On Gas-Solid Cyclone Separator Using Lapple Model - J4rv4i1001Document5 pagesA Review Study On Gas-Solid Cyclone Separator Using Lapple Model - J4rv4i1001Journal 4 ResearchNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Review On Lifting and Assembly of Rotary Kiln Tyre With Shell by Flexible Gripper - J4rv4i1013Document3 pagesA Review On Lifting and Assembly of Rotary Kiln Tyre With Shell by Flexible Gripper - J4rv4i1013Journal 4 ResearchNo ratings yet
- Laboratory Study of Strong, Moderate and Weak Sandstones - J4rv4i1012Document8 pagesLaboratory Study of Strong, Moderate and Weak Sandstones - J4rv4i1012Journal 4 ResearchNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Design Analysis and Fabrication of Manual Rice Transplanting Machine - J4rv4i1011Document5 pagesDesign Analysis and Fabrication of Manual Rice Transplanting Machine - J4rv4i1011Journal 4 ResearchNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- An Overview: Daknet Technology - Broadband Ad-Hoc Connectivity - J4rv4i1009Document4 pagesAn Overview: Daknet Technology - Broadband Ad-Hoc Connectivity - J4rv4i1009Journal 4 ResearchNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Chatbot For College Related Queries - J4rv4i1008Document5 pagesChatbot For College Related Queries - J4rv4i1008Journal 4 ResearchNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Line Follower Robot - J4rv4i1010Document4 pagesLine Follower Robot - J4rv4i1010Journal 4 ResearchNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- An Integrated Approach To Reduce Intra City Traffic at Coimbatore - J4rv4i1002Document6 pagesAn Integrated Approach To Reduce Intra City Traffic at Coimbatore - J4rv4i1002Journal 4 ResearchNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Model Based Analysis of Temperature Process Under Various Control Strategies - J4rv3i12010Document4 pagesModel Based Analysis of Temperature Process Under Various Control Strategies - J4rv3i12010Journal 4 ResearchNo ratings yet
- Image Segmentation Using FCM Algoritm - J4rv3i12021Document3 pagesImage Segmentation Using FCM Algoritm - J4rv3i12021Journal 4 ResearchNo ratings yet
- Survey On A Modern Medicare System Using Internet of Things - J4rv3i12024Document3 pagesSurvey On A Modern Medicare System Using Internet of Things - J4rv3i12024Journal 4 ResearchNo ratings yet
- Unmanned Aerial Vehicle For Remittance - J4rv3i12023Document6 pagesUnmanned Aerial Vehicle For Remittance - J4rv3i12023Journal 4 ResearchNo ratings yet
- Use of Galvanized Steels For Automotive Body - Car Survey Results at Coastal Areas, Mumbai - J4rv3i12013Document7 pagesUse of Galvanized Steels For Automotive Body - Car Survey Results at Coastal Areas, Mumbai - J4rv3i12013Journal 4 ResearchNo ratings yet
- 3-Axial Automated Bowling Arm - J4rv3i12012Document5 pages3-Axial Automated Bowling Arm - J4rv3i12012Journal 4 ResearchNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- An Implementation For Framework For Chemical Structure Using Graph Grammar - J4rv3i12022Document9 pagesAn Implementation For Framework For Chemical Structure Using Graph Grammar - J4rv3i12022Journal 4 ResearchNo ratings yet
- Sensor Fault Identification in Complex Systems - J4rv3i12007Document7 pagesSensor Fault Identification in Complex Systems - J4rv3i12007Journal 4 ResearchNo ratings yet
- Automated Headlight Control Using Labview - J4rv3i12018Document5 pagesAutomated Headlight Control Using Labview - J4rv3i12018Journal 4 ResearchNo ratings yet
- Space Exploration Rover Using Labview - J4rv3i12011Document8 pagesSpace Exploration Rover Using Labview - J4rv3i12011Journal 4 ResearchNo ratings yet
- Advanced Civil Engineering Optimization by Artificial Intelligent Systems: Review - J4rv3i12004Document3 pagesAdvanced Civil Engineering Optimization by Artificial Intelligent Systems: Review - J4rv3i12004Journal 4 ResearchNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Design and Modification of Green Building Aspect at Jilla Sevasadan, Vyara - J4rv3i12006Document6 pagesDesign and Modification of Green Building Aspect at Jilla Sevasadan, Vyara - J4rv3i12006Journal 4 ResearchNo ratings yet
- Revo Series VM Ii: Product SnapshotDocument2 pagesRevo Series VM Ii: Product SnapshotV GosNo ratings yet
- GW HT 73-136K Datasheet-EnDocument1 pageGW HT 73-136K Datasheet-EnLong BunNo ratings yet
- Datasheet Inversor 40KDocument2 pagesDatasheet Inversor 40KRobério FariaNo ratings yet
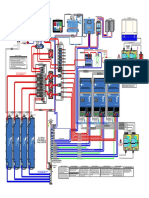
- 3 Phase 5KW24V Quattro II System VEBus BMS 2xSBP 4x200ah Li Cerbo GX Touch 50 MPPT GeneratorDocument1 page3 Phase 5KW24V Quattro II System VEBus BMS 2xSBP 4x200ah Li Cerbo GX Touch 50 MPPT GeneratorJ Armando Gastelo RoqueNo ratings yet
- 5fb632fe646df PDFDocument21 pages5fb632fe646df PDFRS AyanshNo ratings yet
- Mod 3 10ktl3 XH Inverter ManualDocument6 pagesMod 3 10ktl3 XH Inverter Manualmfreude1No ratings yet
- Synchronous Buck Converter Based Low-Cost and High-Efficiency Sub-Module DMPPT PV System Under Partial Shading ConditionsDocument15 pagesSynchronous Buck Converter Based Low-Cost and High-Efficiency Sub-Module DMPPT PV System Under Partial Shading ConditionsSri SriNo ratings yet
- 4 - Fact Sheet PVC2200B enDocument2 pages4 - Fact Sheet PVC2200B enAhmedreyad35No ratings yet
- LATAM CatalogDocument28 pagesLATAM CatalogJimmy Flores SilesNo ratings yet
- Internproc PDFDocument174 pagesInternproc PDFBedebah hahahNo ratings yet
- Specification of Powerone Microsystems Solar Grid Tie String Inverter 1 - 5 KWDocument3 pagesSpecification of Powerone Microsystems Solar Grid Tie String Inverter 1 - 5 KWsharmaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Modelling and Simulation of The Hybrid System PV-Wind With Matlab/SimulinkDocument6 pagesModelling and Simulation of The Hybrid System PV-Wind With Matlab/SimulinkMECHNANENo ratings yet
- SUN - (20-50) K-SG01HP3-EU DeyeDocument2 pagesSUN - (20-50) K-SG01HP3-EU DeyeAlaa ENo ratings yet
- The Most Compact I-V Curve Tracer Around.: Why Buy The PV200?Document5 pagesThe Most Compact I-V Curve Tracer Around.: Why Buy The PV200?Eng.Mustafa AlShujairyNo ratings yet
- On Grid Sizing - 1Document16 pagesOn Grid Sizing - 1Mohamed KhaledNo ratings yet
- Maximize power and savings with GoodWe's Smart DT series invertersDocument1 pageMaximize power and savings with GoodWe's Smart DT series invertersZhen SinNo ratings yet
- Samil Power Inverter Catalogue BrochureDocument16 pagesSamil Power Inverter Catalogue BrochurevhgiaoNo ratings yet
- EN - PVS980 Central Inverter - FW - EXT - B - A4Document212 pagesEN - PVS980 Central Inverter - FW - EXT - B - A4Trực ĐặngNo ratings yet
- Irjet V3i8325Document19 pagesIrjet V3i8325BranislavPetrovicNo ratings yet
- ps150 SeriesDocument72 pagesps150 SeriesMuhammad azeemNo ratings yet
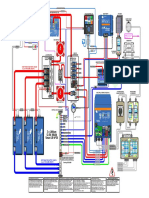
- VE Bus BMS Example With 3KW 12V MultiPlus 230 Volt Revision BDocument1 pageVE Bus BMS Example With 3KW 12V MultiPlus 230 Volt Revision BAlba Car MarNo ratings yet
- TCPPL 146KW Rooftop and Ground Mounted Solar PlantDocument24 pagesTCPPL 146KW Rooftop and Ground Mounted Solar PlantsyamprasadNo ratings yet
- SC4860-48120 (-MPV) User Manual EN 202107Document23 pagesSC4860-48120 (-MPV) User Manual EN 202107Nattachai BoonchooNo ratings yet
- Instructions - Sun 29.9 50k sg01hp3 Eu bm4 - 240203 - enDocument52 pagesInstructions - Sun 29.9 50k sg01hp3 Eu bm4 - 240203 - enilhamoffice10No ratings yet
- Fault Detection - VIT PapersDocument23 pagesFault Detection - VIT PaperssramukNo ratings yet
- Summer Internship Proj - Solar PV Sys - Jan 18Document69 pagesSummer Internship Proj - Solar PV Sys - Jan 18harishNo ratings yet
- Rutland 1200 Manual E Part 2 01.08.19Document2 pagesRutland 1200 Manual E Part 2 01.08.19RokasBabrauskasNo ratings yet
- Inverter AlibabaDocument5 pagesInverter Alibabarobonv vavuNo ratings yet
- PSK2 21 C SJ120 2 1Document2 pagesPSK2 21 C SJ120 2 1DWIGHT GERONIMONo ratings yet
- 14 InvertersDocument52 pages14 InvertersEwerton Serafim100% (1)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)