You might also like
- Mantenimiento de equipos agrícolasDocument42 pagesMantenimiento de equipos agrícolasEnoc Rios AvendañoNo ratings yet
- La Tienda de PalabrasDocument14 pagesLa Tienda de PalabrasEnoc Rios AvendañoNo ratings yet
- Apuntes de Mod. Rec. Fit. 2011Document76 pagesApuntes de Mod. Rec. Fit. 2011Enoc Rios AvendañoNo ratings yet
- Cambio ClimaticoDocument19 pagesCambio ClimaticoEnoc Rios AvendañoNo ratings yet
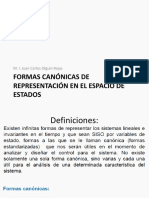
- C6 - Formas Canónicas de Representación en Espacio de EstadosDocument44 pagesC6 - Formas Canónicas de Representación en Espacio de EstadosEnoc Rios AvendañoNo ratings yet
- C1 - Diagramas A Bloques y Estabilidad AbsolutaDocument22 pagesC1 - Diagramas A Bloques y Estabilidad AbsolutaEnoc Rios AvendañoNo ratings yet
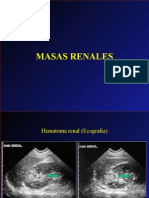
- Masas - Renales - Imagen DiagnósticaDocument22 pagesMasas - Renales - Imagen DiagnósticaramonNo ratings yet
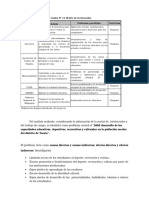
- Trabajo - Arbol de ProblemasDocument6 pagesTrabajo - Arbol de ProblemasJessi Casilla ApazaNo ratings yet
- Ensayo de Formacion SocioculturalDocument5 pagesEnsayo de Formacion SocioculturalJosé Montes de OcaNo ratings yet
- Caso Clinico Colitis UlcerativaDocument6 pagesCaso Clinico Colitis UlcerativaMiguel AngelNo ratings yet
- Luz y Sombras en Los Elementos Naturales y ArtificialesDocument13 pagesLuz y Sombras en Los Elementos Naturales y ArtificialesVictor Hugo Alejandro67% (3)
- Los Indicadores y Su Construccion RizoDocument15 pagesLos Indicadores y Su Construccion RizoAdriana Escalante RojanoNo ratings yet
- Puente Ciruelo PrimeraentregaDocument27 pagesPuente Ciruelo PrimeraentregaLeidy Coral YMNo ratings yet
- Eje PedagogicoDocument6 pagesEje PedagogicoBLANQUISSNo ratings yet
- Gestion de AlmacenesDocument41 pagesGestion de AlmacenesEdgar Santillan TrigosoNo ratings yet
- Trabajo Final - Crucigrama Con RespuestasDocument2 pagesTrabajo Final - Crucigrama Con RespuestasTami LiendoNo ratings yet
- Serpentinas: mineral y yacimientosDocument13 pagesSerpentinas: mineral y yacimientos943164795No ratings yet
- Pruebas de Salud FetalDocument48 pagesPruebas de Salud FetalMaria EchavarriaNo ratings yet
- INSTALACIONES ELECTRICAS UNTELS IntroduciccionDocument62 pagesINSTALACIONES ELECTRICAS UNTELS IntroduciccionRudyJesusCapaIlizarbeNo ratings yet
- ISO 9001 - 2015 de AmazonDocument5 pagesISO 9001 - 2015 de AmazonAntonio MayoralNo ratings yet
- Practica 6 Tensión SuperficialDocument5 pagesPractica 6 Tensión SuperficialAlejandro TorresNo ratings yet
- Chemayolic Interiores Ficha TecnicaDocument5 pagesChemayolic Interiores Ficha TecnicaHoshino Lizzy Kuroineko MikadoNo ratings yet
- Entorno Natural NMDocument17 pagesEntorno Natural NMCattalina RiffoNo ratings yet
- Guia de Modulo Ayudas EducativasDocument4 pagesGuia de Modulo Ayudas EducativasMochiNo ratings yet
- Res 412 2000Document9 pagesRes 412 2000lisethmcNo ratings yet
- Del Rosario Francisco-Unidad 4. Actividad 1Document3 pagesDel Rosario Francisco-Unidad 4. Actividad 1francisco del rosarioNo ratings yet
- Guía sobre encuestas salarialesDocument11 pagesGuía sobre encuestas salarialesJorge Lopez DominguezNo ratings yet
- CesareaDocument4 pagesCesareaChristina WilliamsNo ratings yet
- Calentamiento Global Causas EfectosDocument3 pagesCalentamiento Global Causas EfectosDanny montero100% (1)
- Webquest CompletoDocument55 pagesWebquest CompletoAldo RomanoNo ratings yet
- Identifique Los Tres Componentes de La ActitudDocument3 pagesIdentifique Los Tres Componentes de La ActitudmayraNo ratings yet
- Metrados Acondicionar A InguilpataDocument150 pagesMetrados Acondicionar A InguilpataHectorNuñezLopezNo ratings yet
- Maq. Min 23 - Sem 2 - Equipos de Carga para Minería Subterránea ConvencionalDocument45 pagesMaq. Min 23 - Sem 2 - Equipos de Carga para Minería Subterránea ConvencionalAngelo David Reyes GamarraNo ratings yet
- Manual de Uso SDZ Ii Nuevo PDFDocument16 pagesManual de Uso SDZ Ii Nuevo PDFmirandowebsNo ratings yet
- Aplicaciones de La Química Analítica en La Ingeniería QuímicaDocument3 pagesAplicaciones de La Química Analítica en La Ingeniería QuímicaBujanosNo ratings yet
- Planificación docente para Prácticas del Lenguaje en PrimarioDocument175 pagesPlanificación docente para Prácticas del Lenguaje en PrimarioMariaEugeniaEsquibel100% (2)