You might also like
- Cambio de CoordenadasDocument17 pagesCambio de CoordenadasMOC-3 oneNo ratings yet
- Sistemas de CoordenadasDocument7 pagesSistemas de CoordenadaslexscribdNo ratings yet
- Coordenadas r2 r3 PolaresDocument13 pagesCoordenadas r2 r3 Polaressosa_33680993750% (2)
- Tema 2.1 AA-Sistemas-de-Coordenadas-en-3D-AHEDocument21 pagesTema 2.1 AA-Sistemas-de-Coordenadas-en-3D-AHEYami CortezNo ratings yet
- Preliminares - Matemáticas IIIDocument56 pagesPreliminares - Matemáticas IIIN Aguilar AguellesNo ratings yet
- Coordenadas Cartesianas - Wikipedia, La Enciclopedia LibreDocument38 pagesCoordenadas Cartesianas - Wikipedia, La Enciclopedia LibreantonyNo ratings yet
- Actividad 1Document5 pagesActividad 1Ernesto Cortés AlanísNo ratings yet
- Cordenadas Cartesianas y CilindricasDocument14 pagesCordenadas Cartesianas y CilindricasPerez PerezNo ratings yet
- Sistema de Coordenadas (Trabajo)Document20 pagesSistema de Coordenadas (Trabajo)FilifordsTorresPerez100% (1)
- Proyecto Sistemas de Coordenadas RectangularesDocument10 pagesProyecto Sistemas de Coordenadas RectangularesAna HerverthNo ratings yet
- Tema 3 TMM (2 Ed)Document61 pagesTema 3 TMM (2 Ed)Sergio Grande HortigüelaNo ratings yet
- BrayanDocument10 pagesBrayanCesar Herrera MuñozNo ratings yet
- Coordenadas PolaresDocument23 pagesCoordenadas PolaresBianca Antonella Gutierrez LabanNo ratings yet
- Sistema de CoordenadasDocument5 pagesSistema de CoordenadasWILBER CUTIMBO CHOQUENo ratings yet
- Sergio Cruz Garcia CV IID U5 InvestigacionDocument10 pagesSergio Cruz Garcia CV IID U5 InvestigacionCheco C. GarciaNo ratings yet
- SISTEMA DE COORDENADAS Respaldo-1Document12 pagesSISTEMA DE COORDENADAS Respaldo-1Edbass CoversNo ratings yet
- IvestigacionDocument6 pagesIvestigacionKaren CamachoNo ratings yet
- Posicion OrientacionDocument54 pagesPosicion OrientacionPablo Lozada100% (1)
- Sistema de CoordenadasDocument10 pagesSistema de CoordenadasAlberto GarcíaNo ratings yet
- Coordenadas Cilindricas Con Integrales TriplesDocument18 pagesCoordenadas Cilindricas Con Integrales TriplesJulie Lopez0% (1)
- Eamen Parcial de GeodesiaDocument16 pagesEamen Parcial de GeodesiaJuan Chavez RojasNo ratings yet
- Matematicas III. Guia 1 Primera Parte. Semestre 2-2021Document6 pagesMatematicas III. Guia 1 Primera Parte. Semestre 2-2021YerinsonCollantesNo ratings yet
- Par de RotacionDocument15 pagesPar de RotacionRodolfo CalvoNo ratings yet
- Trans For Mac Ion de Coordenadas Cilindricas A CartesianasDocument20 pagesTrans For Mac Ion de Coordenadas Cilindricas A CartesianasDiego SisalimaNo ratings yet
- Actividad 1 MecanicaDocument6 pagesActividad 1 MecanicaRubi HernandezNo ratings yet
- Coordenadas PolaresDocument12 pagesCoordenadas PolaresCJ CarlosNo ratings yet
- Clase 33Document17 pagesClase 33Jonathan MenachoNo ratings yet
- Sistema de CoordenadasDocument17 pagesSistema de CoordenadasJuan Jesus Vargas ValenciaNo ratings yet
- Campos Vectoriales y ElectromagnetismoDocument12 pagesCampos Vectoriales y ElectromagnetismoManuel Dario FajardoNo ratings yet
- Tsma - Iv - A - Dibujo Automotriz Asistido Por Computador - Katriel Valencia Garcia - Sistema de Coordenadas - 437Document11 pagesTsma - Iv - A - Dibujo Automotriz Asistido Por Computador - Katriel Valencia Garcia - Sistema de Coordenadas - 437Katriel Valencia GarciaNo ratings yet
- Sistemas de CoordenadasDocument18 pagesSistemas de CoordenadasRaulRamos100% (1)
- Sistema de Coordenadas Rectangulares, Cilindricas y EsfericasDocument8 pagesSistema de Coordenadas Rectangulares, Cilindricas y EsfericasRafa RMNo ratings yet
- Localizacion EspacialDocument15 pagesLocalizacion EspacialluisNo ratings yet
- Mecanica ClasicaDocument8 pagesMecanica Clasicafernando martinezNo ratings yet
- SIMBOLOGIADocument3 pagesSIMBOLOGIAOrlando ManriqueNo ratings yet
- Unidad 1 PDFDocument20 pagesUnidad 1 PDFjosé_mercado_23No ratings yet
- Planos TridimensionalesDocument18 pagesPlanos TridimensionalesMartin Aranda TorresNo ratings yet
- 5) Herramientas Matemáticas para La Localización Espacial2Document26 pages5) Herramientas Matemáticas para La Localización Espacial2Blanca Vázquez CastroNo ratings yet
- Coordenadas Rectangulares y GráficasDocument13 pagesCoordenadas Rectangulares y GráficasReyna Beatriz Chuc NahuatNo ratings yet
- Sistema de Coordenadas CartesianasDocument2 pagesSistema de Coordenadas CartesianasAlvaro Mauricio Cordova CopaNo ratings yet
- Sistemas de Coordenadas y Referencia (224053)Document9 pagesSistemas de Coordenadas y Referencia (224053)Jesús David DíazNo ratings yet
- Tipos de CoordenadasDocument12 pagesTipos de CoordenadascesarNo ratings yet
- Tipos de CoordenadasDocument4 pagesTipos de CoordenadasJeffry LeOo MEndozaNo ratings yet
- Geometría de FormasDocument9 pagesGeometría de FormasMaqui FabioNo ratings yet
- Coordenadas CartesianasDocument40 pagesCoordenadas CartesianasJosé Irving Cubillas LeonNo ratings yet
- Coordenadas CartesianasDocument7 pagesCoordenadas CartesianasMatias Sebastian Ruiz100% (1)
- Preguntas de Dinamica de Un Cuerpo RigidoDocument24 pagesPreguntas de Dinamica de Un Cuerpo RigidoAngie Ramirez100% (1)
- Vector UnitarioDocument22 pagesVector UnitarioJavier Suarez100% (1)
- U3 Introduccion A La CinematicaDocument49 pagesU3 Introduccion A La CinematicaAndres Gael GarciaNo ratings yet
- Coordenadas CartesianasDocument9 pagesCoordenadas CartesianasByron MoralesNo ratings yet
- Varios Sistemas de CoordenadasDocument41 pagesVarios Sistemas de CoordenadasAle BellettiNo ratings yet
- Trabajo de DinamicaDocument26 pagesTrabajo de DinamicajoseNo ratings yet
- RI-unidad 3-FinalDocument64 pagesRI-unidad 3-FinalLuly BustamanteNo ratings yet
- U5 PP 96 Coordenadas - CartesianasDocument7 pagesU5 PP 96 Coordenadas - CartesianasJimena Chura CastañetaNo ratings yet
- Coordenadas Polares y Ecuaciones Paramétricas.Document9 pagesCoordenadas Polares y Ecuaciones Paramétricas.Estefani YoveraNo ratings yet
- Sistemas de CoordenadasDocument21 pagesSistemas de CoordenadasJavierSerrataNo ratings yet
- Teoria Electromegnetica - Juan Carlos GranadaDocument323 pagesTeoria Electromegnetica - Juan Carlos GranadaJorge Cardona Vasquez100% (1)
- Coordenadas EsfericasDocument13 pagesCoordenadas EsfericascalosmaldonadoNo ratings yet
- Óptica Geometrica Reflexión y RefracciónDocument8 pagesÓptica Geometrica Reflexión y RefracciónValeria TapiaNo ratings yet
- HernandezArias Candelaria M19S1AI2Document4 pagesHernandezArias Candelaria M19S1AI2Candelaria Hernandez Arias100% (1)
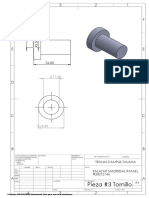
- Pieza #3 TornilloDocument1 pagePieza #3 TornilloRAFAEL ARTURO SALAZAR MADRIGALNo ratings yet
- Proyecto Final ElectroacusticaDocument11 pagesProyecto Final ElectroacusticaErnesto Siles100% (1)
- Guía-De-Diseño DanfossDocument126 pagesGuía-De-Diseño DanfossLuis Angulo CaroNo ratings yet
- EXPERIENCIA 2 Ondas EstacionariasDocument4 pagesEXPERIENCIA 2 Ondas Estacionariasjose angel julio arroyoNo ratings yet
- 6.1.2.16 Lab - Region and Language Options in Windows 7 and VistaDocument8 pages6.1.2.16 Lab - Region and Language Options in Windows 7 and VistaAnonymous OCxP8JlcFNo ratings yet
- Parcial - Escenario 4: Historial de IntentosDocument19 pagesParcial - Escenario 4: Historial de IntentosAndres AlvaresNo ratings yet
- Problemas Derivada Direccional y GradienteDocument3 pagesProblemas Derivada Direccional y GradienteEnmaNo ratings yet
- Taller Monogastricos 2Document43 pagesTaller Monogastricos 2Valentina Molina ﺕﺕNo ratings yet
- Euler LagrangeRP3GDLDocument20 pagesEuler LagrangeRP3GDLPablo Yafet PatiñoNo ratings yet
- CasapalcaDocument27 pagesCasapalcapiunki75% (4)
- Coloracion de Oxidacion PermanenteDocument3 pagesColoracion de Oxidacion Permanentemartap.lorancaNo ratings yet
- Tema 5Document11 pagesTema 5Cometas CachetesNo ratings yet
- PC2 Ee532 - Fiee UniDocument3 pagesPC2 Ee532 - Fiee UniDavidNo ratings yet
- Recetario de Helados Artesanales ActualizadoDocument3 pagesRecetario de Helados Artesanales ActualizadoMichael Chuquiruna Muñoz50% (2)
- Resumen Primer Parcial Calculo IntegralDocument4 pagesResumen Primer Parcial Calculo IntegralStiven GaviriaNo ratings yet
- Tema 3. Evaluación de Estabilidad de Taludes y LaderasDocument58 pagesTema 3. Evaluación de Estabilidad de Taludes y LaderasAlejandro Albia100% (1)
- Clase Textura Final 1Document99 pagesClase Textura Final 1Pepe PeriodistaNo ratings yet
- Guia de Diseño Lineas de Transporte Diseño Troncal ATEERADocument90 pagesGuia de Diseño Lineas de Transporte Diseño Troncal ATEERAGabriel GomezNo ratings yet
- GUÍA Multiplicación División de Potencias OCTAVO MATEDocument3 pagesGUÍA Multiplicación División de Potencias OCTAVO MATECarolina Vicencio FernandezNo ratings yet
- Diseño de EjesDocument31 pagesDiseño de EjesManuel O Lopez ANo ratings yet
- Folletos y Practicas Por Tema - Prácticas - Matrices Sistemas DeterminantesDocument43 pagesFolletos y Practicas Por Tema - Prácticas - Matrices Sistemas DeterminantesRafael SalazarNo ratings yet
- Guia de Ahumados Smoke KingDocument118 pagesGuia de Ahumados Smoke KingPamela OsoNo ratings yet
- Cuadro Comparativo Pert y CPMDocument2 pagesCuadro Comparativo Pert y CPMSebastian SandovalNo ratings yet
- Ensayos DinamicosDocument36 pagesEnsayos DinamicosScarlet Frez BernierNo ratings yet
- Comprobación Biela, CigüeñalDocument56 pagesComprobación Biela, CigüeñaljavierNo ratings yet
- Documento para El Diagnostico - ProyectoDocument30 pagesDocumento para El Diagnostico - ProyectoJenny McbrideNo ratings yet
- Resumen Sobre El Pensamiento Filosófico ModernoDocument5 pagesResumen Sobre El Pensamiento Filosófico ModernoINVERSIONES MANANo ratings yet
- Metodo de Las FuerzasDocument31 pagesMetodo de Las FuerzasJean Carlos Meza PalominoNo ratings yet