You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Progress Report Week#9 UlubeluDocument6 pagesProgress Report Week#9 UlubelutiantaufikNo ratings yet
- Lecture # 17: Pressure Sensors Cont & Mass and Force SensorsDocument24 pagesLecture # 17: Pressure Sensors Cont & Mass and Force SensorsHuzaifa ImtiazNo ratings yet
- Forces in Two Dimensions (Mechanics 1 Paper 4Document11 pagesForces in Two Dimensions (Mechanics 1 Paper 4RocketNo ratings yet
- Air MuscleDocument18 pagesAir Musclemohit616No ratings yet
- 2 Alternating CurrentsDocument23 pages2 Alternating CurrentsKunalWadhawanNo ratings yet
- Weightage analysis for ISRO Mechanical ExamDocument4 pagesWeightage analysis for ISRO Mechanical ExamAnirban Das50% (2)
- Statistical Physics of Particles PDFDocument10 pagesStatistical Physics of Particles PDFme ignoraNo ratings yet
- Iecep Ii Geas SDocument6 pagesIecep Ii Geas SJerry LubiNo ratings yet
- MODULE 2 - Shaft DesignDocument10 pagesMODULE 2 - Shaft DesignBoris PalaoNo ratings yet
- Review Jurnal Bahasa Inggris Rekayasa GempaDocument2 pagesReview Jurnal Bahasa Inggris Rekayasa GempaArdyas Fambayu Putra DyasNo ratings yet
- Applied Partial Differential Equations: January 2003Document129 pagesApplied Partial Differential Equations: January 2003BryanAngamarcaNo ratings yet
- Mathcad - 02. Analysis of Singly Reinforced Concrete Beam.Document3 pagesMathcad - 02. Analysis of Singly Reinforced Concrete Beam.MrAlittle FingerNo ratings yet
- Force and Motion LessonsDocument2 pagesForce and Motion LessonsAriane Nicole Barayang DamianNo ratings yet
- Negative TestingDocument4 pagesNegative TestingSZ EccvNo ratings yet
- Lab Report About The Conservation of Mechanical EnergyDocument5 pagesLab Report About The Conservation of Mechanical EnergyFer Tamez0% (1)
- Design and Performance of Deep Excavations in Soft ClaysDocument27 pagesDesign and Performance of Deep Excavations in Soft Claysozdemir_bNo ratings yet
- Double PendulumDocument16 pagesDouble PendulumDabalee TaaddasaaNo ratings yet
- Calibration of Flow Meters Lab Report PDFDocument10 pagesCalibration of Flow Meters Lab Report PDFsaasNo ratings yet
- Assignment: Small Signal Stability: Task1Document13 pagesAssignment: Small Signal Stability: Task1Nouman ChoudhryNo ratings yet
- Rotary Inverted PendulumDocument8 pagesRotary Inverted PendulumEduardo BittencourtNo ratings yet
- Problem A1 Study of Bernoulli'S Theorem I. AbstractDocument9 pagesProblem A1 Study of Bernoulli'S Theorem I. AbstractpjrapanutNo ratings yet
- Equilibrium of A Suspended ClotheslineDocument7 pagesEquilibrium of A Suspended ClotheslineNikka PerezNo ratings yet
- Walking on a Sphere Tutorial Explores Custom GravityDocument20 pagesWalking on a Sphere Tutorial Explores Custom GravityKhatami OnikNo ratings yet
- Fundamentals of Engineering Mechanics Basic Concepts, Methods and ProblemsDocument6 pagesFundamentals of Engineering Mechanics Basic Concepts, Methods and ProblemsWendell FloresNo ratings yet
- Courses For B.sc. Physics (100 - 400)Document5 pagesCourses For B.sc. Physics (100 - 400)Usman SuleimanNo ratings yet
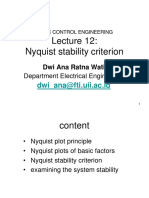
- DSK NyquistDocument19 pagesDSK NyquistRahmat Wahyu PratamaNo ratings yet
- Pace Booklet Sol.Document27 pagesPace Booklet Sol.Akshay Sahai67% (3)
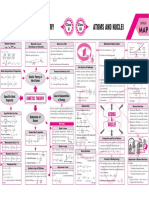
- KInatics Theory and Atom and Nuclie MMDocument1 pageKInatics Theory and Atom and Nuclie MMSanjay GuptaNo ratings yet
- Doppler Effect Physics ProjectDocument26 pagesDoppler Effect Physics ProjectNisha AnandNo ratings yet
- Leak Down TestingDocument15 pagesLeak Down TestingWilson ClaveriaNo ratings yet