You might also like
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- Spe113918 PDFDocument16 pagesSpe113918 PDFعبدالغفار بيزانNo ratings yet
- Optimizing The Performance of Smart Wells in Complex Reservoirs Using Continuously Updated Geological ModelsDocument11 pagesOptimizing The Performance of Smart Wells in Complex Reservoirs Using Continuously Updated Geological ModelsMygroup 5544No ratings yet
- Weather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisFrom EverandWeather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisNo ratings yet
- SPE International Student Paper Contest Real-Time Optimization of Smart WellsDocument10 pagesSPE International Student Paper Contest Real-Time Optimization of Smart WellsHai HoangNo ratings yet
- Spe 111465Document16 pagesSpe 111465HSEQ AZUL ENERGYNo ratings yet
- SPE-189230-MS Applying Edge Computing To Autonomous Well ControlDocument10 pagesSPE-189230-MS Applying Edge Computing To Autonomous Well ControlDiego AraqueNo ratings yet
- Intelligent Well Technology-Dealing With Gas Coning Problems in Production WellsDocument15 pagesIntelligent Well Technology-Dealing With Gas Coning Problems in Production WellsGonZaLiToNo ratings yet
- SPE 160895 Water Injection Optimization Using Streamlines From A Finite-Difference Simulator: A Case Study of A Middle East FieldDocument9 pagesSPE 160895 Water Injection Optimization Using Streamlines From A Finite-Difference Simulator: A Case Study of A Middle East FieldchirazNo ratings yet
- SPE 119394 Comprehensive Coupled Modeling Analysis of Stimulations and Post-Frac Productivity-Case Study of A Tight Gas Field in WyomingDocument11 pagesSPE 119394 Comprehensive Coupled Modeling Analysis of Stimulations and Post-Frac Productivity-Case Study of A Tight Gas Field in WyomingalizareiforoushNo ratings yet
- CFD Analysis With Fluid-Structure Interaction of Opening High-Pressure Safety ValvesDocument9 pagesCFD Analysis With Fluid-Structure Interaction of Opening High-Pressure Safety ValvesPEUSABOIANo ratings yet
- Predictive Control Method For Decentralized Operation of Irrigation CanalsDocument18 pagesPredictive Control Method For Decentralized Operation of Irrigation CanalsJulio CésarNo ratings yet
- Articulo InvesDocument25 pagesArticulo InvesYeferson TrujilloNo ratings yet
- A Practical Way To Prepare Physical-BasedDocument13 pagesA Practical Way To Prepare Physical-BasedJuan Pablo Guzman CastroNo ratings yet
- A vibration cavitation sensitivity parameter based on spectralDocument12 pagesA vibration cavitation sensitivity parameter based on spectrallingxia yangNo ratings yet
- Develop Blowout Intervention Method and Simulator for Ultra-DeepwaterDocument368 pagesDevelop Blowout Intervention Method and Simulator for Ultra-DeepwaterMEUBRONo ratings yet
- The Wind-Tunnel Calibration Techniques Used in Modern Day Aviation To Maintain Test AccuracyDocument9 pagesThe Wind-Tunnel Calibration Techniques Used in Modern Day Aviation To Maintain Test AccuracyMj Santos100% (1)
- PDF 146240 72495Document18 pagesPDF 146240 72495Dodi SuhendraNo ratings yet
- Zenith2015 PDFDocument11 pagesZenith2015 PDFTheNourEldenNo ratings yet
- The Smart Acquisition and Analysis Module (SAAM) For Pipeline InspectionDocument11 pagesThe Smart Acquisition and Analysis Module (SAAM) For Pipeline InspectionAbhiyan Anala ArvindNo ratings yet
- SPE 125331 Waterflooding Optimization Using Gradient Based MethodsDocument14 pagesSPE 125331 Waterflooding Optimization Using Gradient Based MethodsSanjay singhNo ratings yet
- A Case Study On The Effect of Production Segmentation CompletionDocument9 pagesA Case Study On The Effect of Production Segmentation CompletionSara Kamil Abd Al-RedahNo ratings yet
- Developments and Experimental Tests On A Laboratory Scale Drilling Automation SystemDocument17 pagesDevelopments and Experimental Tests On A Laboratory Scale Drilling Automation SystemnanlingjigongNo ratings yet
- Estimation of Multiple Petrophysical Parameters For Hydrocarbon Reservoirs With The Ensemble-Based TechniqueDocument17 pagesEstimation of Multiple Petrophysical Parameters For Hydrocarbon Reservoirs With The Ensemble-Based Techniquegerardo_gonza8118No ratings yet
- Transient Protection Optimization of Pipelines Using Air-Chamber and Air-Inlet ValvesDocument7 pagesTransient Protection Optimization of Pipelines Using Air-Chamber and Air-Inlet ValvesTanmay JainNo ratings yet
- Wastewater Treatment Plant Optimization Using Dynamic ModelingDocument8 pagesWastewater Treatment Plant Optimization Using Dynamic ModelingPatriciaNo ratings yet
- 1 s2.0 S2090447923002071 MainDocument16 pages1 s2.0 S2090447923002071 MainBadreddine EssaidiNo ratings yet
- Nodal Analysis-Based Design For Improving Gas Lift Wells ProductionDocument10 pagesNodal Analysis-Based Design For Improving Gas Lift Wells ProductionEka RamadhanNo ratings yet
- Analysis & Optimization of Pressure Equipment Swing Check Valve by Using FEA MethodsDocument4 pagesAnalysis & Optimization of Pressure Equipment Swing Check Valve by Using FEA MethodsD_D_76No ratings yet
- Smart Wells 3Document17 pagesSmart Wells 3Ali MahmoudNo ratings yet
- Urtec 3719030 MsDocument14 pagesUrtec 3719030 MsIrvany PetitNo ratings yet
- Surge Transients Due To Check Valve Closure in A Municipal Water Pumping Station ProceedingsDocument20 pagesSurge Transients Due To Check Valve Closure in A Municipal Water Pumping Station Proceedingstadewos alemuNo ratings yet
- Smart Valve Flow ConditionersDocument4 pagesSmart Valve Flow ConditionersMuzammil HussainNo ratings yet
- Optimization and Non-Linear Identification of Reservoir Water Flooding ProcessDocument10 pagesOptimization and Non-Linear Identification of Reservoir Water Flooding ProcessAZOJETENo ratings yet
- 12.14 Tech 3 PDFDocument7 pages12.14 Tech 3 PDFA.ANo ratings yet
- Spe 209716 MsDocument20 pagesSpe 209716 MsDiego PalaciosNo ratings yet
- Applsci 10 08657 v3Document16 pagesApplsci 10 08657 v3xolmamatovhabibulloNo ratings yet
- Nodal Analysis for Improving Gas Lift Wells ProductionDocument10 pagesNodal Analysis for Improving Gas Lift Wells ProductionSeth CheathamNo ratings yet
- Flow Analysis of Butterfly Valve Using CFDDocument7 pagesFlow Analysis of Butterfly Valve Using CFDIJMERNo ratings yet
- Intelligent Well Technology-Dealing With Gas Coning Problems in Production WellsDocument16 pagesIntelligent Well Technology-Dealing With Gas Coning Problems in Production Wellsahmad hafidz mahendraNo ratings yet
- IRP 22 Risk Register 2015Document11 pagesIRP 22 Risk Register 2015LawNo ratings yet
- NeeseHydrocycloneUFcontrol 2007 2004Document6 pagesNeeseHydrocycloneUFcontrol 2007 2004adrianHindeNo ratings yet
- Akhenak2013 Online Fault Diagnosis Using Recursive Subspace Identification Application To A Dam-Gallery Open Channel SystemDocument10 pagesAkhenak2013 Online Fault Diagnosis Using Recursive Subspace Identification Application To A Dam-Gallery Open Channel SystemGodofredoNo ratings yet
- Samuel 2013Document11 pagesSamuel 2013salmanNo ratings yet
- Plant Wide Tenesee Eastman PrblemDocument11 pagesPlant Wide Tenesee Eastman PrblemConstantino Seixas FilhoNo ratings yet
- Optimal Operation Scheduling of Irrigation Canals Using Genetic AlgorithmDocument5 pagesOptimal Operation Scheduling of Irrigation Canals Using Genetic AlgorithmytlsharmaNo ratings yet
- Spe 178918 PaDocument14 pagesSpe 178918 PaSanjay singhNo ratings yet
- A Coordination Controller in Variable Speed Pumped StorageDocument11 pagesA Coordination Controller in Variable Speed Pumped StorageoddnewlifeNo ratings yet
- SPE 181685 MS - UnpwDocument15 pagesSPE 181685 MS - Unpwoppai.gaijinNo ratings yet
- Automated ERT for Tailings Dam Seepage MonitoringDocument8 pagesAutomated ERT for Tailings Dam Seepage MonitoringLeopoldoNo ratings yet
- CFD Analysis of Globe Valve DesignDocument3 pagesCFD Analysis of Globe Valve DesignPratik100% (1)
- Volume Split Control of A Hydrocyclone Group: T. Neesse, H. Tiefel, P. KaniutDocument6 pagesVolume Split Control of A Hydrocyclone Group: T. Neesse, H. Tiefel, P. KaniutMaxwell VargasNo ratings yet
- Optimización Multiobjetivo (NSGA-II)Document10 pagesOptimización Multiobjetivo (NSGA-II)Castillo RobertoNo ratings yet
- Intelligent Well Automation-Design and PracticeDocument6 pagesIntelligent Well Automation-Design and Practicearif setiawanNo ratings yet
- Hydraulic Optimization of Transient Protection Dev PDFDocument10 pagesHydraulic Optimization of Transient Protection Dev PDFReeper1No ratings yet
- IMWA2012 Adams 357 PDFDocument8 pagesIMWA2012 Adams 357 PDFmileNo ratings yet
- Completation Inteligent RevistaDocument9 pagesCompletation Inteligent RevistaGabriel Castellon HinojosaNo ratings yet
- SPE 116474 Completion Design For Sandface Monitoring of Subsea WellsDocument8 pagesSPE 116474 Completion Design For Sandface Monitoring of Subsea WellsYerbolSultanbayevNo ratings yet
- IGHEM 2010 Roorkee, IndiaDocument12 pagesIGHEM 2010 Roorkee, Indiaeder_peruchNo ratings yet
- 22 TTG Heavy Oil ExxonmobilDocument56 pages22 TTG Heavy Oil ExxonmobilvuongNo ratings yet
- Optimizing Smart Well Deployment Under UncertaintyDocument32 pagesOptimizing Smart Well Deployment Under UncertaintyRatih HSAINo ratings yet
- Applied Reservoir Simulation Training Course PDFDocument33 pagesApplied Reservoir Simulation Training Course PDFnguyenmainam100% (1)
- Workshop Day1Document65 pagesWorkshop Day1tahermohNo ratings yet
- 27-E112633-P770 Herring BoneDocument6 pages27-E112633-P770 Herring BoneRatih HSAINo ratings yet
- TOPEJ 5 1 Steam BreakthroughDocument6 pagesTOPEJ 5 1 Steam BreakthroughRatih HSAINo ratings yet
- 1-CO2 in CSS HorizontalDocument6 pages1-CO2 in CSS HorizontalRatih HSAINo ratings yet
- 1-Key Parameters in SAGD-mainDocument8 pages1-Key Parameters in SAGD-mainRatih HSAINo ratings yet
- 1-Steam and Gas PushDocument5 pages1-Steam and Gas PushRatih HSAINo ratings yet
- Tar Sand ReportDocument22 pagesTar Sand ReportRatih HSAINo ratings yet
- 1 Superheated CSSDocument7 pages1 Superheated CSSRatih HSAINo ratings yet
- 2004-045 - Shyu - Theiss Herring Bone PDFDocument20 pages2004-045 - Shyu - Theiss Herring Bone PDFRatih HSAINo ratings yet
- 1-N2 CSS Heavy Oil NW ChinaDocument7 pages1-N2 CSS Heavy Oil NW ChinaRatih HSAINo ratings yet
- Multi-Combination Exploiting Technique of Ultra-Heavy Oil Reservoirs With Deep and Thin Layers in Shengli OilfieldDocument5 pagesMulti-Combination Exploiting Technique of Ultra-Heavy Oil Reservoirs With Deep and Thin Layers in Shengli OilfieldRatih HSAINo ratings yet
- Oga Sns Tight Gas Stimulation December 2017Document53 pagesOga Sns Tight Gas Stimulation December 2017Ratih HSAINo ratings yet
- Complect Structure WellDocument12 pagesComplect Structure WellRatih HSAINo ratings yet
- Complect Structure WellDocument12 pagesComplect Structure WellRatih HSAINo ratings yet
- Enhancing The Effectiveness of Vertical Water Injection Wells With Inflow Control Devices (Icds) : Design, Simulation and EconomicsDocument15 pagesEnhancing The Effectiveness of Vertical Water Injection Wells With Inflow Control Devices (Icds) : Design, Simulation and EconomicsRatih HSAINo ratings yet
- 27-E112633-P770 Herring BoneDocument6 pages27-E112633-P770 Herring BoneRatih HSAINo ratings yet
- Sns Herring Bone Tight Gas Stimulation Guidance 300317Document78 pagesSns Herring Bone Tight Gas Stimulation Guidance 300317Ratih HSAINo ratings yet
- Workshop On Multilateral and Extended Reach WellsDocument49 pagesWorkshop On Multilateral and Extended Reach WellsbyedNo ratings yet
- Petitfrere Thermal Flow in PorousDocument241 pagesPetitfrere Thermal Flow in PorousRatih HSAINo ratings yet
- Energies 08 11153 PDFDocument14 pagesEnergies 08 11153 PDFRatih HSAINo ratings yet
- MazenDocument175 pagesMazenRatih HSAINo ratings yet
- Potential For Enhanced Coalbed Methane Recovery - Ccc252Document41 pagesPotential For Enhanced Coalbed Methane Recovery - Ccc252Ratih HSAINo ratings yet
- Environmental impacts of oil recovery methods by US regionDocument16 pagesEnvironmental impacts of oil recovery methods by US regionRatih HSAINo ratings yet
- Simulation Study of GAGD Process in One of Horizontal WellDocument9 pagesSimulation Study of GAGD Process in One of Horizontal WellRatih HSAINo ratings yet
- SPE-ISRM 78237 - Dilation PDFDocument7 pagesSPE-ISRM 78237 - Dilation PDFRatih HSAINo ratings yet
- UcarDocument13 pagesUcarRatih HSAINo ratings yet
- Aquapeel 2.0 Users Manual (New Board) 1903Document10 pagesAquapeel 2.0 Users Manual (New Board) 1903Hải Đăng TrầnNo ratings yet
- Melody Technical Manual - Chapter03 PDFDocument81 pagesMelody Technical Manual - Chapter03 PDFNassima BELIL100% (1)
- Spares TrumaDocument29 pagesSpares Trumaapostucristian100% (1)
- Printcom Uv Lamp 101Z TDS enDocument2 pagesPrintcom Uv Lamp 101Z TDS enconsultachNo ratings yet
- ASTM D6667 Azufre Total en GLPDocument7 pagesASTM D6667 Azufre Total en GLPFredy100% (1)
- EL-239 Analog Integrated Circuits Course OutlineDocument26 pagesEL-239 Analog Integrated Circuits Course OutlineSyed Muhammad AliNo ratings yet
- Production and Characteristics of X-RaysDocument48 pagesProduction and Characteristics of X-Raysmuli aniNo ratings yet
- Vibe Core App Notes 2017Document9 pagesVibe Core App Notes 2017Tola11No ratings yet
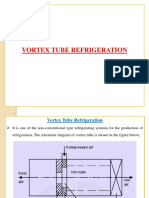
- Vortex Tube Steam Jet RefrigerationDocument14 pagesVortex Tube Steam Jet RefrigerationDInesh KumarNo ratings yet
- Pump 609-28839-1 - Doc 41A68607C03 PDFDocument13 pagesPump 609-28839-1 - Doc 41A68607C03 PDFwhmidi7331No ratings yet
- Custom Built Tubular Heating Elements & Heating Systems For All FluidsDocument8 pagesCustom Built Tubular Heating Elements & Heating Systems For All FluidsdebasisNo ratings yet
- Large Field Refrigeration System-USMC Technical ManualDocument228 pagesLarge Field Refrigeration System-USMC Technical ManualbusybusybusyNo ratings yet
- Scope Meter User's ManualDocument40 pagesScope Meter User's ManualJohn WalesNo ratings yet
- Monoblock Catalog PDFDocument66 pagesMonoblock Catalog PDFken tsaiNo ratings yet
- FLS Lab Offer PDFDocument38 pagesFLS Lab Offer PDFsupendra phuyalNo ratings yet
- Design Considerations for Next Generation Concentrating Solar Power Tower Systems Employing Molten SaltDocument51 pagesDesign Considerations for Next Generation Concentrating Solar Power Tower Systems Employing Molten SaltjvalverdegarciaNo ratings yet
- Stream Selector System: For Process Analyzer ApplicationsDocument12 pagesStream Selector System: For Process Analyzer ApplicationsAlexNo ratings yet
- Philips 21PT5438Philips 21PT5438Document52 pagesPhilips 21PT5438Philips 21PT5438Manoj Sebastian0% (1)
- T-Way Error Code EtimDocument196 pagesT-Way Error Code EtimDedi Sii JendralNo ratings yet
- Tushar ProjectDocument40 pagesTushar ProjectPayal AgarwalNo ratings yet
- Service Manual: KV-21FW150 KV-21FW150Document53 pagesService Manual: KV-21FW150 KV-21FW150Alex Villa AredoNo ratings yet
- Astm d2029 Dew PTDocument6 pagesAstm d2029 Dew PTvlcmstne04No ratings yet
- 1952 9 AudioDocument84 pages1952 9 Audiokimbalsummers801100% (1)
- CRT Monitor PhysicsDocument2 pagesCRT Monitor PhysicsAbdullionNo ratings yet
- JVC HD-ILA Basic Model Training 2007Document100 pagesJVC HD-ILA Basic Model Training 2007buffel1962No ratings yet
- HP Heater # 2Document133 pagesHP Heater # 2Kuppan SrinivasanNo ratings yet
- A Look at The Yaqin MC10LDocument51 pagesA Look at The Yaqin MC10Lozzy123No ratings yet
- Boiler Water Treatment: AlkalinityDocument21 pagesBoiler Water Treatment: AlkalinitySalwan ShubhamNo ratings yet
- As 7Document2 pagesAs 7ari.svartstrom5761No ratings yet
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Transportation Engineering: Theory, Practice, and ModelingFrom EverandTransportation Engineering: Theory, Practice, and ModelingNo ratings yet
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- Methodology for Estimating Carbon Footprint of Road Projects: Case Study: IndiaFrom EverandMethodology for Estimating Carbon Footprint of Road Projects: Case Study: IndiaNo ratings yet
- Cable Supported Bridges: Concept and DesignFrom EverandCable Supported Bridges: Concept and DesignRating: 5 out of 5 stars5/5 (1)
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetFrom EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetRating: 4.5 out of 5 stars4.5/5 (10)
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeFrom EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeRating: 4.5 out of 5 stars4.5/5 (59)
- Principles of Forensic Engineering Applied to Industrial AccidentsFrom EverandPrinciples of Forensic Engineering Applied to Industrial AccidentsNo ratings yet
- Summary of Neil Postman's Amusing Ourselves to DeathFrom EverandSummary of Neil Postman's Amusing Ourselves to DeathRating: 4 out of 5 stars4/5 (2)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansRating: 4.5 out of 5 stars4.5/5 (21)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shallow Foundations: Discussions and Problem SolvingFrom EverandShallow Foundations: Discussions and Problem SolvingRating: 5 out of 5 stars5/5 (1)
- Introducing Structures: A Textbook for Students of Civil and Structural Engineering, Building and ArchitectureFrom EverandIntroducing Structures: A Textbook for Students of Civil and Structural Engineering, Building and ArchitectureRating: 4.5 out of 5 stars4.5/5 (11)
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingFrom EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNo ratings yet
- Field Book for Quality Control in Earthwork Operations: Project Construction Management BookFrom EverandField Book for Quality Control in Earthwork Operations: Project Construction Management BookNo ratings yet
- Professional Surveyors and Real Property Descriptions: Composition, Construction, and ComprehensionFrom EverandProfessional Surveyors and Real Property Descriptions: Composition, Construction, and ComprehensionNo ratings yet