You might also like
- Compact EN PDFDocument8 pagesCompact EN PDFvan long BuiNo ratings yet
- Flight Control SystemsDocument12 pagesFlight Control Systemsiampatrick1No ratings yet
- Daikin ControlDocument175 pagesDaikin Controlchinitn100% (1)
- Unmanned Machinery SpacesDocument20 pagesUnmanned Machinery SpacesRazaq PayapoNo ratings yet
- Pipeline Integrity ManagementDocument19 pagesPipeline Integrity ManagementMuttaqin Tukul TukulNo ratings yet
- Nonlinear Internal Model Control With Automotive ApplicationsDocument243 pagesNonlinear Internal Model Control With Automotive ApplicationsDieter SchwarzmannNo ratings yet
- P & ID Review Check List: Chemical Engineering SiteDocument8 pagesP & ID Review Check List: Chemical Engineering SiteMAHESH CHANDNo ratings yet
- SimulationDocument325 pagesSimulationLokesh NatooNo ratings yet
- Process Dynamic ModellingDocument30 pagesProcess Dynamic ModellingthenmolhiNo ratings yet
- Energy Efficiency Innovative I To 12Document405 pagesEnergy Efficiency Innovative I To 12glassyglassNo ratings yet
- Fuzzy Modeling For ControlDocument12 pagesFuzzy Modeling For ControlAlaa OmarNo ratings yet
- Decision-Making Techniques for Autonomous VehiclesFrom EverandDecision-Making Techniques for Autonomous VehiclesJorge VillagraNo ratings yet
- Process Control HomeworkDocument15 pagesProcess Control HomeworkFrench Sarah Romero Nera100% (2)
- Norsok U-Cr-005 Subsea Production Control SystemsDocument25 pagesNorsok U-Cr-005 Subsea Production Control SystemscristianoclemNo ratings yet
- Ebook - Robot - Sensors and Methods For Mobile Robot Positioning - 1996Document282 pagesEbook - Robot - Sensors and Methods For Mobile Robot Positioning - 1996ikasetyo100% (10)
- Convolutional Neural NetworksDocument13 pagesConvolutional Neural NetworksSrikanth YadavNo ratings yet
- Introduction to Machine Learning in the Cloud with Python: Concepts and PracticesFrom EverandIntroduction to Machine Learning in the Cloud with Python: Concepts and PracticesNo ratings yet
- Simulation Model & Systems SimulationDocument21 pagesSimulation Model & Systems SimulationSilene OliveiraNo ratings yet
- Big Data & IoTDocument66 pagesBig Data & IoTSadman KabirNo ratings yet
- Introduction To Process ControlDocument254 pagesIntroduction To Process Controlkhaled_behery9934100% (1)
- Computers in RailwaysDocument1,014 pagesComputers in Railwaysgokulvarmarajak100% (5)
- Algorithms in MLDocument15 pagesAlgorithms in MLnamiNo ratings yet
- Tuning of Fuzzy Logic Controller Using Genetic AlgorithmDocument19 pagesTuning of Fuzzy Logic Controller Using Genetic AlgorithmAwadalla TaifourNo ratings yet
- Ios Press - Neural Networks For Instrumentation Measurement and Related Industrial Applications PDFDocument340 pagesIos Press - Neural Networks For Instrumentation Measurement and Related Industrial Applications PDFGilson BaldoNo ratings yet
- Robotics Chapter 5 - Robot VisionDocument7 pagesRobotics Chapter 5 - Robot Visiontutorfelix777No ratings yet
- Multi-Agent Systems For Traffic and Transportation Engineering (2009) - (Malestrom)Document447 pagesMulti-Agent Systems For Traffic and Transportation Engineering (2009) - (Malestrom)Vladimir VladimirovNo ratings yet
- Hardware in Loop Simulation With MATLAB PDFDocument6 pagesHardware in Loop Simulation With MATLAB PDFRahul GaikwadNo ratings yet
- Api 221 - 7Document223 pagesApi 221 - 7Saurabh MundheNo ratings yet
- Diffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingFrom EverandDiffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingNo ratings yet
- Smart Material Systems and MEMS: Design and Development MethodologiesFrom EverandSmart Material Systems and MEMS: Design and Development MethodologiesNo ratings yet
- Fuzzy Logic ControllerDocument4 pagesFuzzy Logic ControllerSalma KhanNo ratings yet
- Neuro-Fuzzy Controller For Control and RoboticsDocument13 pagesNeuro-Fuzzy Controller For Control and Roboticssyed mazhar aliNo ratings yet
- Temperature Control Using Fuzzy LogicDocument10 pagesTemperature Control Using Fuzzy LogicijicsjournalNo ratings yet
- Fuzzy Logic Controller DesignDocument46 pagesFuzzy Logic Controller Designcleiton_ctbaNo ratings yet
- Reinforcement LearningDocument46 pagesReinforcement LearningShagunNo ratings yet
- Data-Driven Modelling - Concepts, Approaches and ExperiencesDocument15 pagesData-Driven Modelling - Concepts, Approaches and Experienceswavelet0% (1)
- Lecture On Fuzzy Logic ControlDocument87 pagesLecture On Fuzzy Logic ControlHEMANT KUMARNo ratings yet
- FUZZY LOGIC CONTROL of Temperature Using Membership FunctionsDocument11 pagesFUZZY LOGIC CONTROL of Temperature Using Membership Functionssaranya rNo ratings yet
- Lecture 5 - Multi-Layer Feedforward Neural Networks Using Matlab Part 1Document4 pagesLecture 5 - Multi-Layer Feedforward Neural Networks Using Matlab Part 1meazamaliNo ratings yet
- ANPR - The Complete Automatic Number Plate Recognition SolutionDocument4 pagesANPR - The Complete Automatic Number Plate Recognition SolutionLem Mantilla100% (1)
- Ant Colony - TSP - OptimizationDocument37 pagesAnt Colony - TSP - Optimizationgridtester100% (4)
- FuzzyDocument343 pagesFuzzyHardik AgravattNo ratings yet
- Automatic License Plate Recognition (ALPR) : A State-of-the-Art ReviewDocument15 pagesAutomatic License Plate Recognition (ALPR) : A State-of-the-Art ReviewAnshu ManNo ratings yet
- Accident Detection Using Convolutional Neural NetworksDocument6 pagesAccident Detection Using Convolutional Neural NetworksNabeel HashimNo ratings yet
- Fast Numerical Methods For Mixed-Integer Nonlinear Model-Predictive ControlDocument380 pagesFast Numerical Methods For Mixed-Integer Nonlinear Model-Predictive ControlDaniel Suarez ReyesNo ratings yet
- GTU PLC Programming CourseDocument5 pagesGTU PLC Programming Coursekush ParmarNo ratings yet
- Neural Networks Fuzzy Logic and Genetic Algorithms Synthesis and Applications EbookDocument4 pagesNeural Networks Fuzzy Logic and Genetic Algorithms Synthesis and Applications EbookDhrubajyoti DasNo ratings yet
- DD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionDocument9 pagesDD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionbboyvnNo ratings yet
- Travelling Salesman Problem Using Ant Colonization OptimizationDocument13 pagesTravelling Salesman Problem Using Ant Colonization OptimizationwahoNo ratings yet
- Optimal and Robust ControlDocument216 pagesOptimal and Robust ControlCh BarriosNo ratings yet
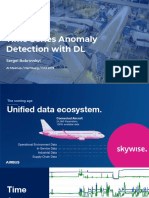
- Time Series Anomaly Detection With DLDocument18 pagesTime Series Anomaly Detection With DLAnonymous 9tJYscsNo ratings yet
- Deep Transfer Learning Guide with Real-World ApplicationsDocument47 pagesDeep Transfer Learning Guide with Real-World Applicationsashish.mukti223No ratings yet
- Predictive Maintenance From Wine Cellars To 40,000ftDocument16 pagesPredictive Maintenance From Wine Cellars To 40,000ftAnonymous 9tJYscsNo ratings yet
- MEE1045 - MECHATRONICS-SYSTEMS-DESIGN - EPJ - 1.0 - 49 - MEE1045 Mechatronics Systems Design PDFDocument2 pagesMEE1045 - MECHATRONICS-SYSTEMS-DESIGN - EPJ - 1.0 - 49 - MEE1045 Mechatronics Systems Design PDFSathish SatNo ratings yet
- Online PID Controller Tuning using Genetic Algorithms SimulationDocument105 pagesOnline PID Controller Tuning using Genetic Algorithms SimulationManish MadhurajNo ratings yet
- Motor Condition MonitorDocument25 pagesMotor Condition MonitorVirgilioNo ratings yet
- U-Net Convolutional Network for Biomedical Image SegmentationDocument8 pagesU-Net Convolutional Network for Biomedical Image SegmentationUsman SaeedNo ratings yet
- Chapter4 PDFDocument11 pagesChapter4 PDFAmirul AizadNo ratings yet
- Swarm Intelligence PSO and ACODocument69 pagesSwarm Intelligence PSO and ACOKrishna Reddy KondaNo ratings yet
- Real-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using LabviewDocument6 pagesReal-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using Labviewvikalp guptaNo ratings yet
- Kavita Singh Cs-A 0509710047Document37 pagesKavita Singh Cs-A 0509710047kavita8642100% (2)
- Iot Communication ProtocolsDocument27 pagesIot Communication ProtocolsSimrandeep SinghNo ratings yet
- Early Fault Detection of Machine Tools Based On Deep Learning and Dynamic IdentificationDocument9 pagesEarly Fault Detection of Machine Tools Based On Deep Learning and Dynamic IdentificationBushra AbbasNo ratings yet
- LMI-Linear Matrix InequalityDocument34 pagesLMI-Linear Matrix InequalitySangramjit SarkarNo ratings yet
- How to Design Optimization Algorithms by Applying Natural Behavioral PatternsFrom EverandHow to Design Optimization Algorithms by Applying Natural Behavioral PatternsNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- DATA MINING and MACHINE LEARNING. CLASSIFICATION PREDICTIVE TECHNIQUES: SUPPORT VECTOR MACHINE, LOGISTIC REGRESSION, DISCRIMINANT ANALYSIS and DECISION TREES: Examples with MATLABFrom EverandDATA MINING and MACHINE LEARNING. CLASSIFICATION PREDICTIVE TECHNIQUES: SUPPORT VECTOR MACHINE, LOGISTIC REGRESSION, DISCRIMINANT ANALYSIS and DECISION TREES: Examples with MATLABNo ratings yet
- Cellular Actuators: Modularity and Variability in Muscle-inspired ActuationFrom EverandCellular Actuators: Modularity and Variability in Muscle-inspired ActuationNo ratings yet
- Top-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsFrom EverandTop-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsNo ratings yet
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Marconite - Earthing Compounds - Granular Marconite Compound EarthingDocument8 pagesMarconite - Earthing Compounds - Granular Marconite Compound EarthingSàazón KasulaNo ratings yet
- Growing violence threatens Nepal elections as Musahars lose faith in politiciansDocument8 pagesGrowing violence threatens Nepal elections as Musahars lose faith in politiciansSàazón KasulaNo ratings yet
- Current Transformer Basics - Understanding Ratio, Polarity, and ClassDocument25 pagesCurrent Transformer Basics - Understanding Ratio, Polarity, and ClassSàazón KasulaNo ratings yet
- Kantipur 2022 11 14Document18 pagesKantipur 2022 11 14Sàazón KasulaNo ratings yet
- An Economic Evaluation System For Building Construction Projects in The Conceputal PhaseDocument6 pagesAn Economic Evaluation System For Building Construction Projects in The Conceputal PhaseSàazón KasulaNo ratings yet
- PPD Lab 1Document2 pagesPPD Lab 1Sàazón KasulaNo ratings yet
- Determination of Catchment Area Determination of Catchment Area Determination of Catchment AreaDocument66 pagesDetermination of Catchment Area Determination of Catchment Area Determination of Catchment AreaSàazón KasulaNo ratings yet
- Adult 1 WaltononThames FarnboroughMainorFarnboroughNorth 04 Jun 2022Document1 pageAdult 1 WaltononThames FarnboroughMainorFarnboroughNorth 04 Jun 2022Sàazón KasulaNo ratings yet
- Instrumentation Lab (Electrical1)Document2 pagesInstrumentation Lab (Electrical1)Sàazón KasulaNo ratings yet
- PPD Lab 2Document9 pagesPPD Lab 2Sàazón KasulaNo ratings yet
- Torrent Downloaded From DemonoidDocument1 pageTorrent Downloaded From DemonoidchriszeguefNo ratings yet
- Determination of Catchment Area Determination of Catchment Area Determination of Catchment AreaDocument66 pagesDetermination of Catchment Area Determination of Catchment Area Determination of Catchment AreaSàazón KasulaNo ratings yet
- Z-Transform of Discrete Functions for Digital Control SystemsDocument5 pagesZ-Transform of Discrete Functions for Digital Control SystemsSàazón KasulaNo ratings yet
- TJ Bodies Place Demands Before Extending Term: KathmanduDocument12 pagesTJ Bodies Place Demands Before Extending Term: KathmanduSàazón KasulaNo ratings yet
- Error 1Document3 pagesError 1Sàazón KasulaNo ratings yet
- Wishing You A Day That Is As Special As You Are For MeDocument1 pageWishing You A Day That Is As Special As You Are For MeSàazón KasulaNo ratings yet
- Chapter 3.10 - Common Network Environments, Connectivity and Security Issues (Cambridge AL 9691)Document10 pagesChapter 3.10 - Common Network Environments, Connectivity and Security Issues (Cambridge AL 9691)lyceum_fansNo ratings yet
- ReportDocument37 pagesReportSàazón KasulaNo ratings yet
- Master the Back-Foot Drive and Defence in CricketDocument7 pagesMaster the Back-Foot Drive and Defence in CricketSàazón KasulaNo ratings yet
- ReportDocument37 pagesReportSàazón KasulaNo ratings yet
- Propagation of An Electromagnetic WaveDocument3 pagesPropagation of An Electromagnetic WaveSàazón KasulaNo ratings yet
- The Faith Here Means The Faith On God and ReligionDocument1 pageThe Faith Here Means The Faith On God and ReligionSàazón KasulaNo ratings yet
- Unit 1 - Introduction To Control Systems - Part2 - SlidesDocument24 pagesUnit 1 - Introduction To Control Systems - Part2 - SlidesSiphamandla CokaNo ratings yet
- Festo CP Lab Offer Provides Hands-On Automation TrainingDocument18 pagesFesto CP Lab Offer Provides Hands-On Automation TrainingCarlos Alberto Andrade NaranjoNo ratings yet
- FOXORO 762CNA Single Station MicroDocument16 pagesFOXORO 762CNA Single Station MicroCristhian DéboraNo ratings yet
- Smith PredictorDocument2 pagesSmith Predictortimus6778No ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessesdhineshpNo ratings yet
- Wet Gas Compressor Capacity Control Systems: A Petrotech, Inc. White PaperDocument8 pagesWet Gas Compressor Capacity Control Systems: A Petrotech, Inc. White PaperGhazaleh GhazanfariNo ratings yet
- 01 09 16 A Simple Method For Detecting Valve Stiction in Oscillating Control Loops PDFDocument12 pages01 09 16 A Simple Method For Detecting Valve Stiction in Oscillating Control Loops PDFChau MaiNo ratings yet
- GemuDocument72 pagesGemuSergio GarridoNo ratings yet
- Fast Controlled: Optimum Regulation ConvertersDocument8 pagesFast Controlled: Optimum Regulation Convertersapi-27057872No ratings yet
- Control: by M BrookeDocument11 pagesControl: by M BrookeChakriNo ratings yet
- Improve Process Control with Feedforward ControlDocument4 pagesImprove Process Control with Feedforward ControlAhmed MostafaNo ratings yet
- Development of An Automatic Arc Welding System Using Smaw ProcessDocument7 pagesDevelopment of An Automatic Arc Welding System Using Smaw ProcessapoiNo ratings yet
- Controller BurnerDocument6 pagesController Burnermarkus_stark3137No ratings yet
- Interrupts On Firebird-V Robot: E-Yantra Team Embedded Real-Time Systems Lab Indian Institute of Technology-BombayDocument67 pagesInterrupts On Firebird-V Robot: E-Yantra Team Embedded Real-Time Systems Lab Indian Institute of Technology-BombaySridhar JayaramanNo ratings yet
- Kranti Kumar Kolli: Curriculum Vitae Instrumentation EngineerDocument3 pagesKranti Kumar Kolli: Curriculum Vitae Instrumentation EngineerKrantikumar Kolli100% (1)