You might also like
- Image Segmentation-Upload1Document41 pagesImage Segmentation-Upload1Monark MehtaNo ratings yet
- Module 3 Image SegmentationDocument296 pagesModule 3 Image SegmentationruikarsachinNo ratings yet
- WINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationDocument25 pagesWINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationMajety S LskshmiNo ratings yet
- 30-07-2022 Unit2bDocument66 pages30-07-2022 Unit2bSarnithaNo ratings yet
- Segment 5Document100 pagesSegment 5priyaNo ratings yet
- Untitled 2Document5 pagesUntitled 2PortorNo ratings yet
- Module 5 NoteDocument48 pagesModule 5 NoteRohitNo ratings yet
- Cp467 12 Lecture17 SegmentationDocument66 pagesCp467 12 Lecture17 Segmentationsatyastriver1518No ratings yet
- 10 Image Segmentation April 2019Document20 pages10 Image Segmentation April 2019Eng DlovanNo ratings yet
- Lab10 Image Segmentation1Document14 pagesLab10 Image Segmentation1Manoj ReddyNo ratings yet
- Image Segmentation Digital Image ProcessingDocument48 pagesImage Segmentation Digital Image Processingrao001No ratings yet
- Automatic Lung Nodules Segmentation and Its 3D VisualizationDocument98 pagesAutomatic Lung Nodules Segmentation and Its 3D Visualizationpriya dharshiniNo ratings yet
- Spatial FilteringDocument50 pagesSpatial FilteringeduhelloNo ratings yet
- 5-SpatialFiltering 2Document74 pages5-SpatialFiltering 2pham tamNo ratings yet
- Performance Evaluation of Edge Detection Techniques For Images in Spatial DomainDocument8 pagesPerformance Evaluation of Edge Detection Techniques For Images in Spatial DomainJiwa AbdullahNo ratings yet
- Chapter 10 Image SegmentationDocument95 pagesChapter 10 Image SegmentationAhsan AnsariNo ratings yet
- Image Segmentation Lecture #30: Region Growing, Split and Merge, Thresholding, Edge DetectionDocument29 pagesImage Segmentation Lecture #30: Region Growing, Split and Merge, Thresholding, Edge DetectionnnehasinghNo ratings yet
- Lec 10 Image SegmentationDocument55 pagesLec 10 Image SegmentationVankesh MathraniNo ratings yet
- Lec-5 Image Analysis-Boundary DetectionDocument77 pagesLec-5 Image Analysis-Boundary Detectionbalasha_937617969No ratings yet
- Digital Image Spatial Filtering TechniquesDocument52 pagesDigital Image Spatial Filtering TechniquesAnonymous 0L2mVaINo ratings yet
- SegmentationDocument37 pagesSegmentationRe TyaraNo ratings yet
- Computational MethodsDocument7 pagesComputational Methodssamikasan0516No ratings yet
- Spatial Filtering (Chapter 3) : CS474/674 - Prof. BebisDocument48 pagesSpatial Filtering (Chapter 3) : CS474/674 - Prof. BebisVithubhavani S HNo ratings yet
- Concepts in Edge DetectionDocument32 pagesConcepts in Edge DetectionPiyush TrivediNo ratings yet
- C18 Computer Vision Edge DetectionDocument38 pagesC18 Computer Vision Edge DetectionnerinconqNo ratings yet
- Segmentation Based in BordersDocument5 pagesSegmentation Based in BorderssharmiNo ratings yet
- Ip 6Document39 pagesIp 6Ram GaneshNo ratings yet
- Image SegmentationDocument40 pagesImage SegmentationArga Bz1No ratings yet
- Edge Detection TechniquesDocument97 pagesEdge Detection TechniquesraghavNo ratings yet
- Edge DetectionDocument29 pagesEdge DetectionAri SutartoNo ratings yet
- Advanced Edge Detection Techniques-BDocument43 pagesAdvanced Edge Detection Techniques-BarunkumarshNo ratings yet
- SharpeningDocument60 pagesSharpeningADDY39No ratings yet
- Spatial Filtering MethodsDocument55 pagesSpatial Filtering MethodsNitheeshNo ratings yet
- FilterDocument23 pagesFilterTekalign TadesseNo ratings yet
- What Is Digital Image? Intensity Gray LevelDocument19 pagesWhat Is Digital Image? Intensity Gray Leveljenish2No ratings yet
- Lecture 212Document14 pagesLecture 212PortorNo ratings yet
- Lec 12 Edge DetectionDocument22 pagesLec 12 Edge DetectionIqrakhanNo ratings yet
- Materi 07. Edge Detection: Pengolahan CitraDocument75 pagesMateri 07. Edge Detection: Pengolahan CitraUsepMSaepullohNo ratings yet
- Basic Edge Detection by Using First-Order DerivativeDocument11 pagesBasic Edge Detection by Using First-Order DerivativeKumarPatraNo ratings yet
- Spatial Filters in Image ProcessingDocument68 pagesSpatial Filters in Image ProcessingMudassir RafiqNo ratings yet
- DSP in Image ProcessingDocument10 pagesDSP in Image ProcessingFaraz ImranNo ratings yet
- 2.2.1.1 Thresholding and Connected ComponentDocument52 pages2.2.1.1 Thresholding and Connected ComponentSathya BamaNo ratings yet
- Lecture 4-Image - Enhancement in Spatial FilteringDocument25 pagesLecture 4-Image - Enhancement in Spatial FilteringRokan UddinNo ratings yet
- Chapter 10Document93 pagesChapter 10SunnyNo ratings yet
- Lecture 6: Edge Detection: Dmitrij CsetverikovDocument9 pagesLecture 6: Edge Detection: Dmitrij CsetverikovsamanNo ratings yet
- Area/Mask Processing Methods: - What Is A Mask?Document10 pagesArea/Mask Processing Methods: - What Is A Mask?Roudy FarraneNo ratings yet
- Chap 10 UpdatedDocument78 pagesChap 10 UpdatedSayem HasanNo ratings yet
- Feature Selection UNIT 4Document40 pagesFeature Selection UNIT 4sujitha100% (2)
- A Fuzzy Logic Approach To Image SegmentationDocument5 pagesA Fuzzy Logic Approach To Image SegmentationSUVANKAR SAMANTARAYNo ratings yet
- Advanced Edge Detection TechniquesDocument71 pagesAdvanced Edge Detection TechniquesRajalakshmi MohandhossNo ratings yet
- Canny Detetctor-1Document21 pagesCanny Detetctor-1Sultan MorseanNo ratings yet
- Paper Title: Author Name AffiliationDocument6 pagesPaper Title: Author Name AffiliationPritam PatilNo ratings yet
- An Extensive Survey On Edge Detection Techniques: AbstractDocument7 pagesAn Extensive Survey On Edge Detection Techniques: AbstractInternational Journal of Engineering and TechniquesNo ratings yet
- T3: Segmentation and Feature Extraction: Computer VisionDocument47 pagesT3: Segmentation and Feature Extraction: Computer VisioncarlogarroNo ratings yet
- VFX HW2Document4 pagesVFX HW2評No ratings yet
- Spatial FilteringDocument45 pagesSpatial Filteringsboy888No ratings yet
- Edge DetectionDocument86 pagesEdge Detectionanum_anhNo ratings yet
- Camera Models and Image Processing TechniquesDocument38 pagesCamera Models and Image Processing TechniquesElisa PopNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Desana Texts and ContextsDocument601 pagesDesana Texts and ContextsdavidizanagiNo ratings yet
- Astm D7928 - 17Document25 pagesAstm D7928 - 17shosha100% (2)
- Statistical Decision AnalysisDocument3 pagesStatistical Decision AnalysisTewfic SeidNo ratings yet
- Nokia CaseDocument28 pagesNokia CaseErykah Faith PerezNo ratings yet
- A Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsDocument9 pagesA Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsmisaelNo ratings yet
- Baobab MenuDocument4 pagesBaobab Menuperseverence mahlamvanaNo ratings yet
- Ailunce HD1 Software ManualDocument33 pagesAilunce HD1 Software ManualMarc LaBarberaNo ratings yet
- Flexible Regression and Smoothing - Using GAMLSS in RDocument572 pagesFlexible Regression and Smoothing - Using GAMLSS in RDavid50% (2)
- Production of Sodium Chlorite PDFDocument13 pagesProduction of Sodium Chlorite PDFangelofgloryNo ratings yet
- Open Far CasesDocument8 pagesOpen Far CasesGDoony8553No ratings yet
- Differential Pulse Code ModulationDocument12 pagesDifferential Pulse Code ModulationNarasimhareddy MmkNo ratings yet
- Peran Dan Tugas Receptionist Pada Pt. Serim Indonesia: Disadur Oleh: Dra. Nani Nuraini Sarah MsiDocument19 pagesPeran Dan Tugas Receptionist Pada Pt. Serim Indonesia: Disadur Oleh: Dra. Nani Nuraini Sarah MsiCynthia HtbNo ratings yet
- Strategies For StartupDocument16 pagesStrategies For StartupRoshankumar BalasubramanianNo ratings yet
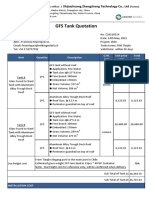
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezNo ratings yet
- CS709 HandoutsDocument117 pagesCS709 HandoutsalexNo ratings yet
- HVAC Master Validation PlanDocument51 pagesHVAC Master Validation Plannavas197293% (30)
- Consumers ' Usage and Adoption of E-Pharmacy in India: Mallika SrivastavaDocument16 pagesConsumers ' Usage and Adoption of E-Pharmacy in India: Mallika SrivastavaSundaravel ElangovanNo ratings yet
- Ultra Slimpak G448-0002: Bridge Input Field Configurable IsolatorDocument4 pagesUltra Slimpak G448-0002: Bridge Input Field Configurable IsolatorVladimirNo ratings yet
- CALCULUS PHYSICS MIDTERMDocument41 pagesCALCULUS PHYSICS MIDTERMMACARIO QTNo ratings yet
- Financial Analysis of Wipro LTDDocument101 pagesFinancial Analysis of Wipro LTDashwinchaudhary89% (18)
- SDS OU1060 IPeptideDocument6 pagesSDS OU1060 IPeptideSaowalak PhonseeNo ratings yet
- Dell Compellent Sc4020 Deploy GuideDocument184 pagesDell Compellent Sc4020 Deploy Guidetar_py100% (1)
- Eye Bags ReliefDocument27 pagesEye Bags ReliefNatsu DragneelNo ratings yet
- CTR Ball JointDocument19 pagesCTR Ball JointTan JaiNo ratings yet
- Crystallizers: Chapter 16 Cost Accounting and Capital Cost EstimationDocument1 pageCrystallizers: Chapter 16 Cost Accounting and Capital Cost EstimationDeiver Enrique SampayoNo ratings yet
- Get Oracle Order DetailsDocument4 pagesGet Oracle Order Detailssiva_lordNo ratings yet
- MCQ Ch16solDocument4 pagesMCQ Ch16solandiswahlongwa870No ratings yet
- WindSonic GPA Manual Issue 20Document31 pagesWindSonic GPA Manual Issue 20stuartNo ratings yet
- Form Active Structure TypesDocument5 pagesForm Active Structure TypesShivanshu singh100% (1)
- United-nations-Organization-uno Solved MCQs (Set-4)Document8 pagesUnited-nations-Organization-uno Solved MCQs (Set-4)SãñÂt SûRÿá MishraNo ratings yet