You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- CO2 By-Product Recovery SystemsDocument2 pagesCO2 By-Product Recovery SystemsSurya Budi WidagdoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- PTDocument6 pagesPTSurya Budi WidagdoNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
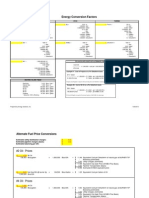
- Energy Conversions ChartDocument3 pagesEnergy Conversions ChartSurya Budi WidagdoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Absolute Pipe Roughness - Enggcyclopedia PDFDocument1 pageAbsolute Pipe Roughness - Enggcyclopedia PDFSurya Budi WidagdoNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- AIGA 060 - 11 PSA Membrane O2 N2 Generators - Reformated Jan 12Document35 pagesAIGA 060 - 11 PSA Membrane O2 N2 Generators - Reformated Jan 12Surya Budi WidagdoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Natural Gas Storage TankDocument10 pagesNatural Gas Storage TankSurya Budi WidagdoNo ratings yet
- VaporizerDocument13 pagesVaporizerSurya Budi Widagdo100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- MPCDocument250 pagesMPCPrathak JienkulsawadNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 14 1 Fritz MunderDocument23 pages14 1 Fritz MunderSurya Budi WidagdoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- AbsorberDocument15 pagesAbsorberShri VardhanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Air Separation JurnalDocument1 pageAir Separation JurnalSurya Budi WidagdoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- MPC Gui ManualDocument109 pagesMPC Gui ManualSurya Budi WidagdoNo ratings yet
- Aspen MUSE GettingstartedDocument27 pagesAspen MUSE GettingstartedSurya Budi WidagdoNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- A-S-P-E-N-O-N-E V7.1Document14 pagesA-S-P-E-N-O-N-E V7.1Surya Budi WidagdoNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Customizing RADFRAC ConvergenceDocument22 pagesCustomizing RADFRAC ConvergenceSurya Budi Widagdo75% (4)
- ACM Library Reference GuideDocument181 pagesACM Library Reference GuideSurya Budi WidagdoNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- MPC 3Document165 pagesMPC 3Surya Budi WidagdoNo ratings yet
- ACM Polymer Simulations With Polymers PlusDocument64 pagesACM Polymer Simulations With Polymers PlusSurya Budi Widagdo100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- MPC 5Document63 pagesMPC 5Surya Budi WidagdoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- OVERVIEW OF PROCESS CONTROL Part 1Document80 pagesOVERVIEW OF PROCESS CONTROL Part 1NOUREDINE MorsliNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- MPC 2Document141 pagesMPC 2Surya Budi WidagdoNo ratings yet
- ACM Modeling Language ReferenceDocument193 pagesACM Modeling Language ReferenceSurya Budi Widagdo100% (1)
- Transport Phenomena 2nd Ed by Bird Stewart Lightfoot (Solution Manual)Document761 pagesTransport Phenomena 2nd Ed by Bird Stewart Lightfoot (Solution Manual)Adibah Hani Azit90% (42)
- ACM Examples GuideDocument240 pagesACM Examples GuideSurya Budi Widagdo100% (8)
- Aspen Custom Modeler 2004.1: Dmcplus Controllers Interface GuideDocument42 pagesAspen Custom Modeler 2004.1: Dmcplus Controllers Interface GuideSurya Budi WidagdoNo ratings yet
- ACM Aspen Modeler ReferenceDocument410 pagesACM Aspen Modeler ReferenceSurya Budi Widagdo100% (3)
- Linear Control of Nonlinear ProcessesDocument23 pagesLinear Control of Nonlinear ProcessesSurya Budi WidagdoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Solution Manual-Chemical Engineering Thermodynamics - Smith Van NessDocument621 pagesSolution Manual-Chemical Engineering Thermodynamics - Smith Van NessSurya Budi Widagdo87% (184)
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlSohibul HajahNo ratings yet
- Bacterial ClassificationDocument2 pagesBacterial ClassificationAndrew JavierNo ratings yet
- Kanban Scheduling SystemsDocument8 pagesKanban Scheduling SystemsharsurajNo ratings yet
- MATHSDocument221 pagesMATHSAbdulai FornahNo ratings yet
- MQ SSL/TLS Channels Including V8 ChangesDocument23 pagesMQ SSL/TLS Channels Including V8 ChangesAnkit GuptaNo ratings yet
- Report Builder ENGDocument94 pagesReport Builder ENGfran reyNo ratings yet
- Introduction To Software TestingDocument42 pagesIntroduction To Software TestingRoxanaNo ratings yet
- Answer Key - CK-12 Chapter 01 Basic Geometry Concepts PDFDocument16 pagesAnswer Key - CK-12 Chapter 01 Basic Geometry Concepts PDFValery Liz0% (1)
- How To Implement A Distributed CommonJ Work Manager ESDocument20 pagesHow To Implement A Distributed CommonJ Work Manager ESAbmel Salim LopessierNo ratings yet
- University Insitute of Engineering Electrical EngineeringDocument85 pagesUniversity Insitute of Engineering Electrical EngineeringPyrenean IbexNo ratings yet
- Physics Paper 2 Nov 2004Document16 pagesPhysics Paper 2 Nov 2004tommyliuNo ratings yet
- Pega Interview PreperationDocument35 pagesPega Interview PreperationPramodh SSNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pengaruh Customer Experience Terhadap Kepuasan Pelanggan Dan Loyalitas Pelanggan Survei Pada Pelanggan KFC Kawi MalangDocument6 pagesPengaruh Customer Experience Terhadap Kepuasan Pelanggan Dan Loyalitas Pelanggan Survei Pada Pelanggan KFC Kawi MalangSatria WijayaNo ratings yet
- Carpentry 1-2Document16 pagesCarpentry 1-2Zha AgmataNo ratings yet
- Aqa Byb1 W QP Jun07Document12 pagesAqa Byb1 W QP Jun07李超然No ratings yet
- 2.1.2 Pseudocode PDFDocument13 pages2.1.2 Pseudocode PDFBlessed Endibye KanyembaNo ratings yet
- Important QuestionsDocument8 pagesImportant QuestionsdineshbabuNo ratings yet
- Rohini 14412226478Document7 pagesRohini 14412226478HeloNo ratings yet
- Training - Manual - Diagnostic - and - Troublesh CPC 202GDocument186 pagesTraining - Manual - Diagnostic - and - Troublesh CPC 202GGA AnnerNo ratings yet
- Asme Se-165 2004Document25 pagesAsme Se-165 2004Kamalnath KpNo ratings yet
- Ch02HullOFOD9thEdition - EditedDocument31 pagesCh02HullOFOD9thEdition - EditedHarshvardhan MohataNo ratings yet
- DA-100English ManualDocument10 pagesDA-100English ManualGiang TrườngNo ratings yet
- 5Document20 pages5AndriansyahNo ratings yet
- ThinkSmart Hub SpecDocument5 pagesThinkSmart Hub SpecJose LopezNo ratings yet
- User ManualDocument91 pagesUser ManualJorge Luis SoriaNo ratings yet
- Electrical BEE Latest 2022 2023 Quantum Series (Searchable)Document116 pagesElectrical BEE Latest 2022 2023 Quantum Series (Searchable)ritamlyrisNo ratings yet
- HD 70 CDocument101 pagesHD 70 CPhamVanGiangNo ratings yet
- Mitsubishi 4g64 Engine 2 4l Service ManualDocument10 pagesMitsubishi 4g64 Engine 2 4l Service Manualjennifer100% (49)
- Lec.06.pptx STRUCTURAL GEOLOGY LECTURE NOTESDocument9 pagesLec.06.pptx STRUCTURAL GEOLOGY LECTURE NOTESSalvadora1No ratings yet
- Ash Content PDFDocument4 pagesAsh Content PDFsunniNo ratings yet
- Srinivasan Engineering College, Perambalur: Part B Unit IDocument2 pagesSrinivasan Engineering College, Perambalur: Part B Unit IPrabhat SinghNo ratings yet
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeFrom EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeRating: 3.5 out of 5 stars3.5/5 (165)
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthFrom EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthRating: 4.5 out of 5 stars4.5/5 (197)
- The Game: Penetrating the Secret Society of Pickup ArtistsFrom EverandThe Game: Penetrating the Secret Society of Pickup ArtistsRating: 4 out of 5 stars4/5 (131)