You might also like
- DSPDocument119 pagesDSPVishal SinghNo ratings yet
- 4411 Motor3D v13Document78 pages4411 Motor3D v13Roberto Eduardo Quintal PalomoNo ratings yet
- HVP - Notes Unit 1.3 Conventional Vehicle PerformanceDocument12 pagesHVP - Notes Unit 1.3 Conventional Vehicle PerformanceDevansh SrivastavaNo ratings yet
- ChargerDocument2 pagesChargerAafaqueQureshiNo ratings yet
- Cloud Based BMS Data Analytics System For EV Using IOTDocument13 pagesCloud Based BMS Data Analytics System For EV Using IOTIJRASETPublicationsNo ratings yet
- Sse Product Data SheetDocument26 pagesSse Product Data SheetPablo Dario Gonzalez ReyesNo ratings yet
- Power Quality Improvement in Distribution Network Using DSTATCOM With Battery Energy Storage SystemDocument22 pagesPower Quality Improvement in Distribution Network Using DSTATCOM With Battery Energy Storage Systemvipin chandNo ratings yet
- OP5600 Simulator User ManualDocument52 pagesOP5600 Simulator User Manualantonellagrande100% (1)
- Simulation and Comparison of Three Level Inverter-392Document10 pagesSimulation and Comparison of Three Level Inverter-392Đức Khánh Đức KhánhNo ratings yet
- PMSM Motor Control ThesisDocument52 pagesPMSM Motor Control ThesisLoyel RoseNo ratings yet
- Compact Direct Connected Credit MeterDocument2 pagesCompact Direct Connected Credit MeterBalendraShahNo ratings yet
- Modulation Techniques in Inverters: Advanced Power Electronics and Applications ECEG 6309Document44 pagesModulation Techniques in Inverters: Advanced Power Electronics and Applications ECEG 6309Meng FenNo ratings yet
- Project Anti Sleeping ReportDocument29 pagesProject Anti Sleeping ReportRahul RkNo ratings yet
- Relays GlossaryDocument16 pagesRelays Glossarycupid75100% (1)
- Energy Audit-SYLLABUS: ReferencesDocument4 pagesEnergy Audit-SYLLABUS: ReferencesHariprasath SelvakumarNo ratings yet
- smps1000 EltekDocument2 pagessmps1000 Elteksebax123No ratings yet
- Vtu Electricvehecles Module2openelectivepptbydr 221021054719 1293bcdfDocument64 pagesVtu Electricvehecles Module2openelectivepptbydr 221021054719 1293bcdfprashantkumar chinamalliNo ratings yet
- Servo Basico x1Document18 pagesServo Basico x1Elvis Torres QuispeNo ratings yet
- BLDC Motor Driven Solar PV Array Fed Water Pumping System Employing Zeta ConverterDocument6 pagesBLDC Motor Driven Solar PV Array Fed Water Pumping System Employing Zeta ConverterRahul UdayanNo ratings yet
- 04493430Document7 pages04493430Krishna KarthikNo ratings yet
- 1&2.electrical Systems & Motors PDFDocument75 pages1&2.electrical Systems & Motors PDFvikubhardwaj9224No ratings yet
- Sofcon Training AttachmentDocument3 pagesSofcon Training Attachmentjogeorge85No ratings yet
- 000 - Solar Photovoltaic Generators With MPPT and Battery Storage in Microgrids-File Exchange - MATLAB Central PDFDocument20 pages000 - Solar Photovoltaic Generators With MPPT and Battery Storage in Microgrids-File Exchange - MATLAB Central PDFTrần Quang TuyênNo ratings yet
- MJR ppt-1Document15 pagesMJR ppt-1teslaNo ratings yet
- Design and Implementation of AMR System Using Arduino and Digital Energy MeterDocument4 pagesDesign and Implementation of AMR System Using Arduino and Digital Energy MeterEngidNo ratings yet
- FP5043Document7 pagesFP5043Maitry ShahNo ratings yet
- Why Do We Use Star Connection On Transmission and Distribution On DeltaDocument2 pagesWhy Do We Use Star Connection On Transmission and Distribution On DeltaAmirSaeedNo ratings yet
- Tms 320 F 28379 DDocument222 pagesTms 320 F 28379 DJuan Ku LosanoNo ratings yet
- Energy-Efficient Electric Motors and Their Applications by Howard E. Jordan (Auth.)Document194 pagesEnergy-Efficient Electric Motors and Their Applications by Howard E. Jordan (Auth.)mylaptop VJethoseNo ratings yet
- Brian Baker Hardware Engineer ResumeDocument1 pageBrian Baker Hardware Engineer Resumeapi-291590435No ratings yet
- Project THESISDocument58 pagesProject THESISnithinNo ratings yet
- Design Report For A Formula Electric CarDocument2 pagesDesign Report For A Formula Electric CarSalwa Paracha100% (1)
- From Simulink To Autosar Enabling Autosar Code Generation With Model Based DesignDocument46 pagesFrom Simulink To Autosar Enabling Autosar Code Generation With Model Based Designdeepakdcb20102487No ratings yet
- Matlab Course BrochureDocument8 pagesMatlab Course Brochuresakshi_singh_25No ratings yet
- 16444-Part 1 - A1-2017 PDFDocument2 pages16444-Part 1 - A1-2017 PDFHOD Scitpl [Sands]No ratings yet
- Advancements in Inverter TechnologyDocument9 pagesAdvancements in Inverter TechnologyAyush KumarNo ratings yet
- Sensorless Trapezoidal Control of BLDC MotorsDocument38 pagesSensorless Trapezoidal Control of BLDC MotorsYang ElvisQUNo ratings yet
- Battery Sizing TemplateDocument15 pagesBattery Sizing TemplateJAY PARIKHNo ratings yet
- Simulation of three-phase transformerless UPSDocument7 pagesSimulation of three-phase transformerless UPSTài Nguyễn Minh NhậtNo ratings yet
- DC/DC Converters For Electric Vehicles: Monzer Al Sakka, Joeri Van Mierlo and Hamid GualousDocument25 pagesDC/DC Converters For Electric Vehicles: Monzer Al Sakka, Joeri Van Mierlo and Hamid Gualousme_droidNo ratings yet
- 10 InvertersDocument136 pages10 InverterszapzahtNo ratings yet
- 8 Candidate Quiz Buzzer Using 8051Document33 pages8 Candidate Quiz Buzzer Using 8051kamalahasanm80% (10)
- Motors - Three Phase Induction Machine: ContentDocument41 pagesMotors - Three Phase Induction Machine: ContentDuy Quang ĐàoNo ratings yet
- Uar4N: User ManualDocument40 pagesUar4N: User ManualArtur EckertNo ratings yet
- HEV EV ArchitectureDocument48 pagesHEV EV ArchitectureConstantin Teodor ArdeiuNo ratings yet
- Excitation CIGREA1 10Document6 pagesExcitation CIGREA1 10ucb2_ntpcNo ratings yet
- Design and Construction of Water in Fuel DetectorDocument60 pagesDesign and Construction of Water in Fuel DetectorNjitnumNo ratings yet
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- Design Cable Selection GuideDocument13 pagesDesign Cable Selection GuidejugnudubeyNo ratings yet
- ACS712 Hall Effect Current SensorDocument7 pagesACS712 Hall Effect Current SensorWilliam BlackNo ratings yet
- JD - Eidiko Systems Integrators PVT LTDDocument3 pagesJD - Eidiko Systems Integrators PVT LTDMuvvala Santosh KumarNo ratings yet
- Sonu 1Document19 pagesSonu 1Sonu SinghNo ratings yet
- Automatic Street Light Control Using LDRDocument3 pagesAutomatic Street Light Control Using LDRDGPROJECTS100% (1)
- Chapter-1: 1.1.1 The Principle of WindmillDocument22 pagesChapter-1: 1.1.1 The Principle of WindmillVijay BavikattiNo ratings yet
- ARM Architecture OverviewDocument7 pagesARM Architecture OverviewManiswari MothukuruNo ratings yet
- DEKRA Certification EMC Test Report for EVBox Charging StationDocument40 pagesDEKRA Certification EMC Test Report for EVBox Charging StationMansour AslNo ratings yet
- FP2-E DatasheetDocument7 pagesFP2-E DatasheetAnanthu AsokanNo ratings yet
- Introducing The Powerful and Flexible S7-1200Document3 pagesIntroducing The Powerful and Flexible S7-1200Muhammad Ali AsifNo ratings yet
- Low-Cost Smart Card Interface ICDocument28 pagesLow-Cost Smart Card Interface ICCatalin NacuNo ratings yet
- Replace brake fluid and check reservoir pressureDocument5 pagesReplace brake fluid and check reservoir pressureCatalin NacuNo ratings yet
- Low-Cost Smart Card Interface ICDocument28 pagesLow-Cost Smart Card Interface ICCatalin NacuNo ratings yet
- Digital multimeters DMG 600-610 LCD display featuresDocument7 pagesDigital multimeters DMG 600-610 LCD display featuresCatalin NacuNo ratings yet
- PCB Design Tutorial Rev ADocument25 pagesPCB Design Tutorial Rev Arahuldhar2142249529100% (30)
- Semikron Datasheet Skm100gb125dn 21915390Document6 pagesSemikron Datasheet Skm100gb125dn 21915390Catalin NacuNo ratings yet
- Digital multimeters DMG 600-610 LCD display featuresDocument7 pagesDigital multimeters DMG 600-610 LCD display featuresCatalin NacuNo ratings yet
- Stand-mount/Books Helf Louds Peaker System Product SummaryDocument1 pageStand-mount/Books Helf Louds Peaker System Product SummaryCatalin NacuNo ratings yet
- DM With LED Display - v.1.0Document8 pagesDM With LED Display - v.1.0Xan KriegorNo ratings yet
- DBL FcyDocument3 pagesDBL FcyCatalin NacuNo ratings yet
- 2080 rm001 - en eDocument722 pages2080 rm001 - en eCatalin NacuNo ratings yet
- Catalogue Measuring Instruments ISKRADocument110 pagesCatalogue Measuring Instruments ISKRAArmin KadragicNo ratings yet
- Catalogue Measuring Instruments ISKRADocument110 pagesCatalogue Measuring Instruments ISKRAArmin KadragicNo ratings yet
- NAVODILA ZGIB BI4xx GB Ver 1.00Document2 pagesNAVODILA ZGIB BI4xx GB Ver 1.00Catalin NacuNo ratings yet
- Wayne Walcott Aug 2015 HarmonicsDocument78 pagesWayne Walcott Aug 2015 HarmonicsCatalin NacuNo ratings yet
- M BusDocument88 pagesM Busakshay_haridasNo ratings yet
- BuckDocument8 pagesBuckCatalin NacuNo ratings yet
- Dallara f308 Owners Manual 2013 AprobDocument54 pagesDallara f308 Owners Manual 2013 AprobblancohccNo ratings yet
- CV Carb Part 2 WebDocument4 pagesCV Carb Part 2 WebkanwarNo ratings yet
- 6000 - EN - 02 - ACBB - Indd 404 06-10-02 14.21.53Document64 pages6000 - EN - 02 - ACBB - Indd 404 06-10-02 14.21.53Raja NarenderNo ratings yet
- Catalogo de Partes Dieci L3500 (2000)Document169 pagesCatalogo de Partes Dieci L3500 (2000)CONCRETOS DE CALIDAD SASNo ratings yet
- Data Sheet - Series 7000 Meter DSDocument6 pagesData Sheet - Series 7000 Meter DSJesus DavalosNo ratings yet
- 11 KV Ring Main Units and AccessoriesDocument35 pages11 KV Ring Main Units and AccessoriesAbdus Salam0% (1)
- 022 - 01 - 03 - Fuel GaugeDocument2 pages022 - 01 - 03 - Fuel GaugeJaucafoNo ratings yet
- The Principle of Sewing TechnologyDocument18 pagesThe Principle of Sewing TechnologyKhurram IftikharNo ratings yet
- 2005 Nixon Service Manual GuideDocument31 pages2005 Nixon Service Manual GuideDobrin PaulNo ratings yet
- B2 - M13.09 - 2009.11.12 Ata33Document108 pagesB2 - M13.09 - 2009.11.12 Ata33ichigo_bleach00No ratings yet
- Patient Monitoring System Project Report OriginalDocument84 pagesPatient Monitoring System Project Report OriginalAmar Dharmadhikari62% (13)
- Brosur SMA STP 8-10 - 3AV-40 - HDPDocument2 pagesBrosur SMA STP 8-10 - 3AV-40 - HDPadi brwNo ratings yet
- AKAI GX Reel To Reel RecorderDocument11 pagesAKAI GX Reel To Reel RecorderRoger CalvertNo ratings yet
- NPD HP PCs Nov19Document69 pagesNPD HP PCs Nov19Pedro Iván Mendoza FloresNo ratings yet
- Touareg 2003-07 Engine RepairsDocument317 pagesTouareg 2003-07 Engine RepairsZayd Majoka75% (4)
- Japan Auctions GradesDocument5 pagesJapan Auctions GradesAlzieNo ratings yet
- 7700-7720 Manual Servicio RaymondDocument497 pages7700-7720 Manual Servicio Raymondmontacargasgamma montacargas100% (2)
- Curtis Se40-Se50 Parts ListDocument26 pagesCurtis Se40-Se50 Parts ListrobertNo ratings yet
- Massey FERGUSONDocument67 pagesMassey FERGUSONvivek6020100% (4)
- STOCK DETAILS FOR JAN 2011Document159 pagesSTOCK DETAILS FOR JAN 2011Adlin DeeNo ratings yet
- VatDocument7 pagesVatthegr8t1No ratings yet
- Chapter III - Electrical Power Generation Using Speed Breaker - Jefferson BeloDocument6 pagesChapter III - Electrical Power Generation Using Speed Breaker - Jefferson BeloJefferson BeloNo ratings yet
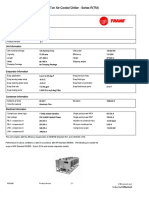
- 70-125 Ton Air-Cooled Chiller - Series R (TM) : Job InformationDocument1 page70-125 Ton Air-Cooled Chiller - Series R (TM) : Job InformationjavierNo ratings yet
- Parts Catalog: FY8-31FQ-000Document26 pagesParts Catalog: FY8-31FQ-000Ива-Благомир МариновиNo ratings yet
- Terasaki Short Form FINAL WEBDocument16 pagesTerasaki Short Form FINAL WEBgovind1965No ratings yet
- Monitoring and protecting 3-phase motors with the LR97D solid state overload relayDocument2 pagesMonitoring and protecting 3-phase motors with the LR97D solid state overload relayandreNo ratings yet
- Dervasil Route de Popenot - 42800 Saint Joseph - France Tel: +33 (0) 4 77 83 22 81 - Fax: +33 (0) 4 77 83 22 80Document48 pagesDervasil Route de Popenot - 42800 Saint Joseph - France Tel: +33 (0) 4 77 83 22 81 - Fax: +33 (0) 4 77 83 22 80Hồ ThànhNo ratings yet
- MBDCDocument2 pagesMBDCRachel RobinsonNo ratings yet
- Solid State Pressure Sensor: FeaturesDocument2 pagesSolid State Pressure Sensor: FeaturesCarlosDíazPeñaNo ratings yet
- Terex Tr50 Off Highway Truck Parts BookDocument20 pagesTerex Tr50 Off Highway Truck Parts Bookvivian100% (53)