You might also like
- Marquesas de ChocolateDocument2 pagesMarquesas de ChocolateGladys SotilloNo ratings yet
- Convenio de Ocupacion Previa AmgrDocument14 pagesConvenio de Ocupacion Previa AmgrMariell GómezNo ratings yet
- Valorizacion de Obra N°02 Losa RecreacionalDocument26 pagesValorizacion de Obra N°02 Losa RecreacionalJulian Herbeleau Guzmán RibeiroNo ratings yet
- Producto de MatricesDocument13 pagesProducto de MatricesMaicol BarahonaNo ratings yet
- GTLectopolis J DocenteDocument210 pagesGTLectopolis J DocenteDrisela Mo de Sierra86% (22)
- AntecedentesDocument5 pagesAntecedentesrioscrak100% (1)
- Jesus Esel Unico CimientoDocument6 pagesJesus Esel Unico CimientoVelkis González de NúñezNo ratings yet
- Canciones Del 20 Mayo 2018Document6 pagesCanciones Del 20 Mayo 2018Samuel Noriega LeccaNo ratings yet
- Circuitos Electricos Presentacion PowerpointDocument21 pagesCircuitos Electricos Presentacion Powerpointjosevaldez2016100% (1)
- Sopa de LetrasDocument2 pagesSopa de LetrasDesther Josue Perez QuevedoNo ratings yet
- Procesos AuxiliaresDocument30 pagesProcesos AuxiliaresJosé Manuel M.L.No ratings yet
- Relleno Sanitario de TulumDocument37 pagesRelleno Sanitario de TulumRicaurte RicardoNo ratings yet
- Zapatas v6 - Abril2008Document13 pagesZapatas v6 - Abril2008Eduardo Vivas EspinozaNo ratings yet
- Heterocedasticidad TeoriaDocument20 pagesHeterocedasticidad TeoriaMark Tantalean MedinaNo ratings yet
- Posiciones AnatomicasDocument7 pagesPosiciones AnatomicasSofia ChambaNo ratings yet
- Puente Viga LosaDocument56 pagesPuente Viga LosaPaola Guevara IdrogoNo ratings yet
- Ficha de Seguridad Pybuthrin 33Document14 pagesFicha de Seguridad Pybuthrin 33HSEQ AGUACHICANo ratings yet
- Métodos Numéricos Con MATLAB - John Mathews, Kurtis Fink - 3edDocument2 pagesMétodos Numéricos Con MATLAB - John Mathews, Kurtis Fink - 3edByron Benjamin BaharasNo ratings yet
- MEMORIA DESCRIPTIVA ARQUITECTURA CERCO - Lic.Document5 pagesMEMORIA DESCRIPTIVA ARQUITECTURA CERCO - Lic.Ivan Alexander Navarro SilupuNo ratings yet
- C 189 Innovateperu Adtc2 2020.docx Distribuidora TulipanDocument8 pagesC 189 Innovateperu Adtc2 2020.docx Distribuidora TulipanWizeri Zegarra GálvezNo ratings yet
- Que Es El Ser HumanoDocument2 pagesQue Es El Ser Humanocesar BurgosNo ratings yet
- Exposicion DrogadiccionDocument17 pagesExposicion DrogadiccionLis Fabiola Otazu0% (2)
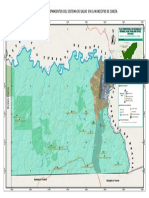
- 9 Mapa de Equipamientos de SaludDocument1 page9 Mapa de Equipamientos de SaludMauricio PinheiroNo ratings yet
- Proyecto Corazon de JesusDocument25 pagesProyecto Corazon de JesusMelida Rafael QuispeNo ratings yet
- Costos Imss 2024Document5 pagesCostos Imss 2024VALERIA AGUILARNo ratings yet
- Padrón de Beneficiarios Programa de Apoyo Alimentario Municipal 2019-1-1Document968 pagesPadrón de Beneficiarios Programa de Apoyo Alimentario Municipal 2019-1-1Limbertl Arley HidalgoNo ratings yet
- Deber 2 de Integrales IndefinidasDocument7 pagesDeber 2 de Integrales IndefinidasChristian Borja TacuriNo ratings yet
- Septimo Trabajo Luz en La OscuridadDocument2 pagesSeptimo Trabajo Luz en La OscuridadAlex OliverNo ratings yet
- Proyecto de TítuloDocument77 pagesProyecto de TítuloFabián HermosillaNo ratings yet
- 2 Ficha Tecnica Frescasa FiberglassDocument8 pages2 Ficha Tecnica Frescasa Fiberglassno seNo ratings yet