You might also like
- Temperature Control Lab Report MuzDocument18 pagesTemperature Control Lab Report MuzAhmad Muzammil75% (8)
- HVAC Control Systems and Building Automation System PDFDocument19 pagesHVAC Control Systems and Building Automation System PDFStephany Montero100% (5)
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- 8 Bit Microcontroller: Vishal V.Panchbhai, Asst. Prof. E & T DeptDocument41 pages8 Bit Microcontroller: Vishal V.Panchbhai, Asst. Prof. E & T DeptSagar DhapkeNo ratings yet
- HP2 H08Document51 pagesHP2 H08Aby George100% (1)
- Amit - Optimizing Oracle Essbase Formulas & Calc ScriptsDocument100 pagesAmit - Optimizing Oracle Essbase Formulas & Calc ScriptsAraz AbbaszadehNo ratings yet
- Control 2021-2022Document119 pagesControl 2021-2022hussein9388hsNo ratings yet
- HumidificationDocument22 pagesHumidificationmohammed hussienNo ratings yet
- Hvac Controls - Invensys: J.IlangumaranDocument62 pagesHvac Controls - Invensys: J.Ilangumaranapi-25999517No ratings yet
- 22.hvac Controls - InvensysDocument62 pages22.hvac Controls - Invensysmeeng2014No ratings yet
- Hvac BMS: HVAC Systems Eng. Ahmed MoustafaDocument126 pagesHvac BMS: HVAC Systems Eng. Ahmed MoustafaBahaa bunniNo ratings yet
- W7ADocument15 pagesW7AShujah RashidNo ratings yet
- 1 PDFDocument2 pages1 PDFrohitNo ratings yet
- Assignment 2Document36 pagesAssignment 2Monika SadhaNo ratings yet
- Chapter 8 FTDocument40 pagesChapter 8 FTUthaiyavani RajendranNo ratings yet
- Docm (AutoRecovered)Document13 pagesDocm (AutoRecovered)Anonymous AFFiZnNo ratings yet
- Lecture # 11: Dr. Muzaffar AliDocument40 pagesLecture # 11: Dr. Muzaffar AliNadeem AbbasNo ratings yet
- All-Air Systems GuideDocument62 pagesAll-Air Systems GuideradiopascalgeNo ratings yet
- Introduction To Control: The ProcessDocument7 pagesIntroduction To Control: The ProcessshajiNo ratings yet
- HVAC Handbook Part 10 All Air Systems PDFDocument62 pagesHVAC Handbook Part 10 All Air Systems PDFTanveer100% (2)
- Biochemical Engineering B.SC, University of DebrecenDocument6 pagesBiochemical Engineering B.SC, University of DebrecenArifuzzamanNo ratings yet
- PID Control of Heat Exchanger SystemDocument6 pagesPID Control of Heat Exchanger SystemTuấn Anh Nguyễn100% (1)
- Experiment 10 - Concentric Tube Heat ExchangerDocument19 pagesExperiment 10 - Concentric Tube Heat Exchangersohail khanNo ratings yet
- Control System Components 205Document2 pagesControl System Components 205Rohit ShresthaNo ratings yet
- Performance and Efficiency Test of A Refrigeration Plant Test ProcedurDocument4 pagesPerformance and Efficiency Test of A Refrigeration Plant Test ProcedurEJ TolentinoNo ratings yet
- Humidistat: Control System Components 209Document2 pagesHumidistat: Control System Components 209Rohit ShresthaNo ratings yet
- Experiment 10 - Concentric Tube Heat Exchanger FORMULADocument21 pagesExperiment 10 - Concentric Tube Heat Exchanger FORMULABenjamin YusuphNo ratings yet
- Ac 2013 FinDocument15 pagesAc 2013 FinRay WangNo ratings yet
- Heating Coil in The Main Air Handling UnitDocument15 pagesHeating Coil in The Main Air Handling UnitMohsinShaikh100% (2)
- Temperature Controller Basics HandbookDocument9 pagesTemperature Controller Basics HandbookSanctaTiffanyNo ratings yet
- Control EngineeringDocument17 pagesControl Engineeringaditya thakkar100% (1)
- Pag Web Mic 1462Document13 pagesPag Web Mic 1462rogermantilla08No ratings yet
- Underfloor Heating GuideDocument4 pagesUnderfloor Heating GuideJerryPNo ratings yet
- Tempreture Fan Micheal33Document26 pagesTempreture Fan Micheal33Peter DindahNo ratings yet
- HVAC Control SystemsDocument4 pagesHVAC Control SystemsFahad Alvi100% (1)
- Process Control Lab ManualDocument19 pagesProcess Control Lab ManualAnkit Singh100% (1)
- Enyecontrols System Info UpdatedDocument116 pagesEnyecontrols System Info UpdatedJon Elmer DelgadoNo ratings yet
- Handbook No 1 Balancing of Control LoopsDocument56 pagesHandbook No 1 Balancing of Control Loopstomislav_vucinic100% (1)
- Chapter Overview: 3: Sensors and ActuatorsDocument93 pagesChapter Overview: 3: Sensors and ActuatorsGigiNo ratings yet
- Basic Concept of Process Control SystemDocument29 pagesBasic Concept of Process Control Systemhabtemariam mollaNo ratings yet
- ISA SymbologyDocument41 pagesISA SymbologyBagus AtmajaNo ratings yet
- Hawken Engineering Building Air Conditioning SystemDocument15 pagesHawken Engineering Building Air Conditioning SystemDamien NaiduNo ratings yet
- ObjectivesDocument7 pagesObjectivesPeeka booNo ratings yet
- Environmental Control SystemDocument16 pagesEnvironmental Control SystemAlaye AkpanaNo ratings yet
- Heat Exchanger Part 3Document19 pagesHeat Exchanger Part 3Mohamed AbdullahNo ratings yet
- Instrumentation Scheme of Thermal Power PlantDocument39 pagesInstrumentation Scheme of Thermal Power Plantgdreddy25No ratings yet
- Working Principle of Control Valve With DiagramDocument10 pagesWorking Principle of Control Valve With DiagramKhamis AfendiNo ratings yet
- Shell and Tube Heat Exchanger ExperimentDocument17 pagesShell and Tube Heat Exchanger ExperimentCynosure SkyNo ratings yet
- Heat Exchanger Lab Manual ELABDocument15 pagesHeat Exchanger Lab Manual ELAB유지No ratings yet
- Auto 221chapter 2Document6 pagesAuto 221chapter 2Ben Aldrian Tariao IbañezNo ratings yet
- Intru MentationDocument180 pagesIntru MentationjeswinchNo ratings yet
- Experiment 8: Temperature Control: 8.1 Objective of The ExperimentDocument11 pagesExperiment 8: Temperature Control: 8.1 Objective of The ExperimentHemavathy RtNo ratings yet
- CS LabReport 8Document10 pagesCS LabReport 8Muhammad AfzaalNo ratings yet
- Pid Versus On-Off Control, Why Use A Valve Positioner?: MeasurementDocument13 pagesPid Versus On-Off Control, Why Use A Valve Positioner?: MeasurementVale BajoNo ratings yet
- Controllers and Sensors: Block 6 Control Hardware: Electric /pneumatic ActuationDocument12 pagesControllers and Sensors: Block 6 Control Hardware: Electric /pneumatic ActuationUche Avriel Asimov OputaNo ratings yet
- Chapter 11 - Monitoring and Control Systems: A. IntroductionDocument12 pagesChapter 11 - Monitoring and Control Systems: A. IntroductionHamid KhanNo ratings yet
- Temperature Control System... Himanshu RamdeoDocument25 pagesTemperature Control System... Himanshu RamdeoSurya BandhuNo ratings yet
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- Temperature and Humidity Independent Control (THIC) of Air-conditioning SystemFrom EverandTemperature and Humidity Independent Control (THIC) of Air-conditioning SystemNo ratings yet
- Oral and Practical Review: Reflections on the Part 147 CourseFrom EverandOral and Practical Review: Reflections on the Part 147 CourseNo ratings yet
- 3 PDFDocument9 pages3 PDFMostafa AwadNo ratings yet
- CH 04 SensorDocument33 pagesCH 04 SensorMostafa AwadNo ratings yet
- Air System Sizing Summary For Administration BuildingDocument9 pagesAir System Sizing Summary For Administration BuildingMostafa AwadNo ratings yet
- Air Conditioning System Control: 5.1 Face and Bypass DampersDocument10 pagesAir Conditioning System Control: 5.1 Face and Bypass DampersMostafa AwadNo ratings yet
- PSCDocument1 pagePSCMostafa AwadNo ratings yet
- Fire FightingDocument14 pagesFire FightingMostafa AwadNo ratings yet
- Test 123Document1 pageTest 123Mostafa AwadNo ratings yet
- PLC Programming for Mechatronics Control SystemsDocument63 pagesPLC Programming for Mechatronics Control SystemsSwapvaibNo ratings yet
- Screenshot 2023-11-17 at 6.53.53 PMDocument51 pagesScreenshot 2023-11-17 at 6.53.53 PMgiNo ratings yet
- Ebook - Allan Mckay - VFX Hardware Guide - Jan 2019 PDFDocument29 pagesEbook - Allan Mckay - VFX Hardware Guide - Jan 2019 PDFSundeep ParmarNo ratings yet
- Introduction to SIMD ArchitecturesDocument21 pagesIntroduction to SIMD ArchitecturesAshok AshokbyadavNo ratings yet
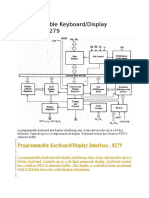
- Programmable Keyboard/Display Interface - 8279Document10 pagesProgrammable Keyboard/Display Interface - 8279prashantvlsiNo ratings yet
- UNIT1Document15 pagesUNIT1AliaBintiZaidelNo ratings yet
- Microcontroller and Embedded Systems Question BankDocument4 pagesMicrocontroller and Embedded Systems Question BankGanaraj KaruvajeNo ratings yet
- Copper ore crusher simulation in PLCDocument13 pagesCopper ore crusher simulation in PLCKhaled OuniNo ratings yet
- Red Hat Virtualization-4.4-Installing Red Hat Virtualization As A Self-Hosted Engine Using The Cockpit Web interface-en-USDocument82 pagesRed Hat Virtualization-4.4-Installing Red Hat Virtualization As A Self-Hosted Engine Using The Cockpit Web interface-en-USDarkperroNo ratings yet
- Chapter 2.1Document59 pagesChapter 2.1Temesgen MekonenNo ratings yet
- Lec - A-01 - Number Systems and CodesDocument97 pagesLec - A-01 - Number Systems and Codescys96No ratings yet
- PIC24H Family DatasheetDocument290 pagesPIC24H Family DatasheettuzarahulNo ratings yet
- Ab Initio Developement Best Practice & Guidelines v.0.3Document30 pagesAb Initio Developement Best Practice & Guidelines v.0.3Ravi ChythanyaNo ratings yet
- CPDSDocument319 pagesCPDSrupakothurNo ratings yet
- Cse-1100 1Document25 pagesCse-1100 1Showmik AhmedNo ratings yet
- Data Transfer SchemeDocument20 pagesData Transfer SchemeJohn PaulNo ratings yet
- Oracle LinuxDocument170 pagesOracle LinuxjuanarruNo ratings yet
- Res2dinv GuideDocument15 pagesRes2dinv GuideRizha RizkyNo ratings yet
- Steps To Generate AWR Report: 1. Log in To DatabaseDocument8 pagesSteps To Generate AWR Report: 1. Log in To DatabaseAnonymous 8RhRm6Eo7hNo ratings yet
- Isaac Cs Aqa Book 2022Document363 pagesIsaac Cs Aqa Book 2022Ricky JacobNo ratings yet
- Mobile ProcessorDocument3 pagesMobile ProcessorMohamd barcaNo ratings yet
- LOGICAL INSTRUCTIONS 8085 MICROPROCESSORDocument6 pagesLOGICAL INSTRUCTIONS 8085 MICROPROCESSORakankshaNo ratings yet
- 04 Verilog LabDocument19 pages04 Verilog LabEstéfano Gómez100% (1)
- Assignment 2Document2 pagesAssignment 2Nzan NkapNo ratings yet
- CSE331L - Introduction to Assembly LanguageDocument7 pagesCSE331L - Introduction to Assembly LanguageTanjila Islam Ritu 1811017642No ratings yet
- The Hardware of The KDF9Document23 pagesThe Hardware of The KDF9nomen nescioNo ratings yet