You might also like
- The Effect of Shipping Traffic On Moored ShipsDocument6 pagesThe Effect of Shipping Traffic On Moored ShipsyehochananioannesNo ratings yet
- Resist en CIA de Barcazas RectangularesDocument5 pagesResist en CIA de Barcazas RectangularesFederico CurroNo ratings yet
- IJETR022947Document5 pagesIJETR022947erpublicationNo ratings yet
- Model Test Based Formulations of Ship-Ship Interaction ForcesDocument18 pagesModel Test Based Formulations of Ship-Ship Interaction ForcesMaciej ReichelNo ratings yet
- Bow ThrustersDocument15 pagesBow ThrustersJohn Angelo Tuliao100% (1)
- OMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFDocument10 pagesOMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFAnonymous JEe6LWPNo ratings yet
- CFD WaterjetDocument8 pagesCFD WaterjettafocanNo ratings yet
- NPL With NacaDocument18 pagesNPL With NacaMuhamad Nazren Mohamed ZaidiNo ratings yet
- Numerical Study On Propulsive Factors in Regular Head and Oblique WavesDocument20 pagesNumerical Study On Propulsive Factors in Regular Head and Oblique WavesMara Rebeka HerzogNo ratings yet
- Design and Performance of Bow Thrusters-Beveridge-1971Document48 pagesDesign and Performance of Bow Thrusters-Beveridge-1971Ron Chan100% (2)
- Hydrodynamic performance enhancement of ships using stern wedges, flaps and interceptorsDocument9 pagesHydrodynamic performance enhancement of ships using stern wedges, flaps and interceptorsMuhamad Nazren Mohamed ZaidiNo ratings yet
- Yutesma 0704, IJEASTDocument5 pagesYutesma 0704, IJEASTFatehsingh parabNo ratings yet
- Hydrodynamic Shape Optimization of Hybrid Underwater GliderDocument7 pagesHydrodynamic Shape Optimization of Hybrid Underwater GliderManh Dien HuynhNo ratings yet
- Design of Hydrofoil UsingDocument18 pagesDesign of Hydrofoil UsingmarihomenonNo ratings yet
- CFD 1 8Document8 pagesCFD 1 8Bebek DaratNo ratings yet
- Optimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingDocument9 pagesOptimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingTat-Hien LeNo ratings yet
- Study of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachDocument10 pagesStudy of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachCarlosNo ratings yet
- Sea TrailsDocument10 pagesSea TrailsNguyễn Đình ĐứcNo ratings yet
- HSMV 2014 Vitiello MirandaDocument9 pagesHSMV 2014 Vitiello MirandaTihomir MarkovicNo ratings yet
- Felli - Experimental Ana.2006.SYMPDocument8 pagesFelli - Experimental Ana.2006.SYMPIgnacio SantanaNo ratings yet
- Kci Fi003049415Document15 pagesKci Fi003049415hansaeyuriNo ratings yet
- Forefoot Design For Planing HullsDocument17 pagesForefoot Design For Planing Hullsadslfasdf100% (1)
- Experimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface ConditionsDocument12 pagesExperimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface Conditionsnoor muhammadNo ratings yet
- Cozijn - 2014 - Thruster InteractionDocument22 pagesCozijn - 2014 - Thruster InteractionachmedNo ratings yet
- Numerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformDocument10 pagesNumerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformFauzan MahadityaNo ratings yet
- Anchor Handling Vessel Behavior in Horizontal Plane in A Uniform Current Field During OperationDocument19 pagesAnchor Handling Vessel Behavior in Horizontal Plane in A Uniform Current Field During OperationLuana MarchioriNo ratings yet
- QoN - 40 Defence Response To QoN2Document6 pagesQoN - 40 Defence Response To QoN2bramNo ratings yet
- Oe 72 (2013) 453 SRS, CGSDocument17 pagesOe 72 (2013) 453 SRS, CGSsbnrs68No ratings yet
- Effect of Spray Rails and Wedges On The Performance of Semi-Displacement HullsDocument12 pagesEffect of Spray Rails and Wedges On The Performance of Semi-Displacement HullsAnggaGustamaNo ratings yet
- Brochure 2017 - MIT 2NDocument26 pagesBrochure 2017 - MIT 2Njwpaprk1No ratings yet
- Med 03Document6 pagesMed 03saka_inuNo ratings yet
- Tajali (2011) Hydrodynamic Analysis of Multi-Body Floating Piers Under Wave ActionDocument9 pagesTajali (2011) Hydrodynamic Analysis of Multi-Body Floating Piers Under Wave ActionkometmayorNo ratings yet
- Numerical Investigation of Shallow Water Effect On A Barge Ship ResistanceDocument9 pagesNumerical Investigation of Shallow Water Effect On A Barge Ship ResistancegksahaNo ratings yet
- Read About Bi-Diretional Cross WaveDocument24 pagesRead About Bi-Diretional Cross WaveSahil JawaNo ratings yet
- Comparative Analysis of Conventional and Swath Passenger CatamaranDocument11 pagesComparative Analysis of Conventional and Swath Passenger Catamaranmichael baileyNo ratings yet
- Thruster EffectivityDocument190 pagesThruster Effectivityronny-su100% (2)
- Amecrc PDFDocument17 pagesAmecrc PDFshimul2008No ratings yet
- Effect of Pretension On Moored Ship RespDocument13 pagesEffect of Pretension On Moored Ship RespIvandito HerdayandityaNo ratings yet
- On The Design of An Autonomous Robot Fish: June 2003Document7 pagesOn The Design of An Autonomous Robot Fish: June 2003Trương PhúNo ratings yet
- Design and Performance of Bow ThrustersDocument47 pagesDesign and Performance of Bow ThrustersKelvin Xu100% (1)
- Propulsive Performance Analysis of A Stepped Hull by Model Test Results and Sea Trial DataDocument8 pagesPropulsive Performance Analysis of A Stepped Hull by Model Test Results and Sea Trial DataMichael McDonaldNo ratings yet
- Post Panamax BehaviourDocument9 pagesPost Panamax BehaviourAurelio DutariNo ratings yet
- Nonlinear Dynamic Analysis of Offshore Drilling RisersDocument9 pagesNonlinear Dynamic Analysis of Offshore Drilling RisersCROSSFIELD ENGINEERING ENERGYNo ratings yet
- 1 s2.0 S0029801817301646 Main PDFDocument15 pages1 s2.0 S0029801817301646 Main PDFOdumoduChigozieUzomaNo ratings yet
- Hull Design Considerations For Improved Stability of Fishing Vessels in WavesDocument14 pagesHull Design Considerations For Improved Stability of Fishing Vessels in WavesEd UrquizaNo ratings yet
- Analysis of An Autonomous Underwater GliderDocument10 pagesAnalysis of An Autonomous Underwater GliderZein Al-Abedeen BarhoumNo ratings yet
- Hydrodynamic Analysis of KVLCC2 Ship Sailing NearDocument16 pagesHydrodynamic Analysis of KVLCC2 Ship Sailing NearSai Sudhakar MNNo ratings yet
- Paper Session 4 Hawks Wood MDocument20 pagesPaper Session 4 Hawks Wood Msea_jazzNo ratings yet
- Numerical and Experimental Study On Seakeeping PerDocument13 pagesNumerical and Experimental Study On Seakeeping PerRFNo ratings yet
- Asymmetric Behavior of Propeller-Rudder SystemDocument13 pagesAsymmetric Behavior of Propeller-Rudder Systemsumardiono10No ratings yet
- Applied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenDocument13 pagesApplied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenMilton AlvaradoNo ratings yet
- Some Practical Design Aspects of Appendages For PaDocument7 pagesSome Practical Design Aspects of Appendages For PaOscar Costas CampuzanoNo ratings yet
- Hydrodynamic Features of High-Speed VesselsDocument11 pagesHydrodynamic Features of High-Speed VesselsChen Chu-yunNo ratings yet
- J Ijnaoe 2016 09 010Document8 pagesJ Ijnaoe 2016 09 010Anh NgoNo ratings yet
- 15th Numerical Towing Tank Symposium PDFDocument223 pages15th Numerical Towing Tank Symposium PDFAnonymous mv84nhzNo ratings yet
- Assessment of Ship Squat in Shallow Water Using CFDDocument10 pagesAssessment of Ship Squat in Shallow Water Using CFDSushant PandurangiNo ratings yet
- FLOAT-OVERS USING DP: CASE STUDIES AND LESSONS LEARNTDocument13 pagesFLOAT-OVERS USING DP: CASE STUDIES AND LESSONS LEARNTSơn Nguyễn-Lê100% (1)
- Preparacion de Superficies 2008Document38 pagesPreparacion de Superficies 2008Nikolas GonzalezNo ratings yet
- Penten Group Construction Method StatementDocument8 pagesPenten Group Construction Method StatementNikolas GonzalezNo ratings yet
- An Introduction To The IMDG CodeDocument27 pagesAn Introduction To The IMDG CodeNikolas GonzalezNo ratings yet
- A complete guide to dry docking a shipDocument21 pagesA complete guide to dry docking a shipNikolas GonzalezNo ratings yet
- Air and Noise: Abrasive Blast CleaningDocument5 pagesAir and Noise: Abrasive Blast CleaningBharathNaikPanjaNo ratings yet
- 1 - GMDSSDocument20 pages1 - GMDSSNikolas GonzalezNo ratings yet
- PaysliptemplateDocument9 pagesPaysliptemplateSyaffiqLajisNo ratings yet
- Week Ahead TemplateDocument3 pagesWeek Ahead TemplateNikolas GonzalezNo ratings yet
- AVIA122 Ch06Document27 pagesAVIA122 Ch06Nikolas GonzalezNo ratings yet
- Maniobra de Los Buques - Ricard Mari SagarraDocument401 pagesManiobra de Los Buques - Ricard Mari SagarraBoris Arribas Samper100% (8)
- dd1 HSRDocument170 pagesdd1 HSRNikolas GonzalezNo ratings yet
- Lesson One - PatGDocument19 pagesLesson One - PatGNikolas GonzalezNo ratings yet
- Ship Propulsion 1Document23 pagesShip Propulsion 1Nikolas Gonzalez100% (1)
- U.S. Aids To Navigation System: On Navigable Waters Except Western RiversDocument4 pagesU.S. Aids To Navigation System: On Navigable Waters Except Western RiversRommel BelchezNo ratings yet
- KPT Long Report - 1Document22 pagesKPT Long Report - 1Syed Arsalan AbbasNo ratings yet
- Att-Iii M (Engine)Document1 pageAtt-Iii M (Engine)Alfani Nur PrabudiNo ratings yet
- Lower Airspace RomaniaDocument1 pageLower Airspace RomaniaIsac Robert100% (1)
- OWS Handout PDFDocument36 pagesOWS Handout PDFMalik ForbesNo ratings yet
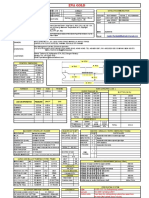
- Ship's Particulars EVA GoldDocument1 pageShip's Particulars EVA Goldpratiyush thakurNo ratings yet
- Vessel Specification-2 - 3863 PDFDocument1 pageVessel Specification-2 - 3863 PDFПомощникПомощникNo ratings yet
- Stability Cross CurvesDocument17 pagesStability Cross Curvesmahi1437No ratings yet
- Competetion in Harbour TowageDocument16 pagesCompetetion in Harbour TowageDeanna BarrettNo ratings yet
- Titanic Survivor Mrs Margaretha Emerentia Frölicher-Stehli BiographyDocument2 pagesTitanic Survivor Mrs Margaretha Emerentia Frölicher-Stehli BiographyРаде БајићNo ratings yet
- Introduction To Shipping and LogisticsDocument22 pagesIntroduction To Shipping and LogisticsTambe Chalomine AgborNo ratings yet
- MMD Chennai ManualDocument13 pagesMMD Chennai ManualshivakuchanaNo ratings yet
- Meo Sovereign 1: 8200BHP / DP2 / AHTSDocument2 pagesMeo Sovereign 1: 8200BHP / DP2 / AHTSAndrii Dzoba100% (1)
- New Edition Publications and Charts 2022Document18 pagesNew Edition Publications and Charts 2022Дима МельничукNo ratings yet
- War Diary of Captai 00 GermDocument416 pagesWar Diary of Captai 00 GermUwe NerlichNo ratings yet
- Lifeboat Check PointDocument2 pagesLifeboat Check Pointsalman rifkanNo ratings yet
- Union Steamship Company Collection - VancouverDocument16 pagesUnion Steamship Company Collection - VancouverEmmanuelleLizéNo ratings yet
- Comprehensive Ship Design & Consultancy ServicesDocument2 pagesComprehensive Ship Design & Consultancy Servicesrafael espinosa semperNo ratings yet
- To Counter Piracy and Armed Robbery Against Ships in Asia: Regional GuideDocument33 pagesTo Counter Piracy and Armed Robbery Against Ships in Asia: Regional GuideViktor BesedaNo ratings yet
- Pilot Transfer Arrangements BrochureDocument5 pagesPilot Transfer Arrangements BrochureMats Karlsson100% (1)
- 919 Damage Control PlansDocument5 pages919 Damage Control PlanssabaingiNo ratings yet
- Port designer's handbook recommendations for wind, wavesDocument2 pagesPort designer's handbook recommendations for wind, wavesSteven Liyanto100% (2)
- Check List No. 1A - Regn of Merchant Ships - Private OwnerDocument11 pagesCheck List No. 1A - Regn of Merchant Ships - Private OwnerManeeswar ReddyNo ratings yet
- Gamin Sailboat PlansDocument6 pagesGamin Sailboat PlansJim100% (11)
- LCT 805 (150 Tons) : 3 Units Under Construction Available JulyDocument3 pagesLCT 805 (150 Tons) : 3 Units Under Construction Available JulydhaadhNo ratings yet
- 883 Chemical Mariner Magnetic Compass Adj CertDocument1 page883 Chemical Mariner Magnetic Compass Adj CertGutta RavindraNo ratings yet
- MEYER WERFT - Navigator - 05 - 18 - RZ - Web - Final - 1Document20 pagesMEYER WERFT - Navigator - 05 - 18 - RZ - Web - Final - 1Stipe SinkoNo ratings yet
- M.V. Am Shraddha: Ballastwater Management Plan (Manual)Document27 pagesM.V. Am Shraddha: Ballastwater Management Plan (Manual)ramel sigueNo ratings yet
- Philippine Maritime Industry Authority issues certificate of ownership for private/commercial vesselsDocument1 pagePhilippine Maritime Industry Authority issues certificate of ownership for private/commercial vesselsAlvin MasiasNo ratings yet
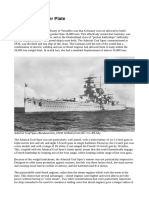
- Battle of The River PlateDocument8 pagesBattle of The River PlateRussell PhillipsNo ratings yet